IJRET: International Journal of Research in Engineering and Technology
eISSN: 2319-1163 | pISSN: 2321-7308
A SIMPLIFIED METHOD OF DESIGNING A PHASE-LEAD
COMPENSATOR TO IMPROVE THE M-S-D SYSTEM'S PHASE MARGIN
Muawia Mohamed Ahmed Mahmoud
AL Neelain University, Faculty of Engineering, Head of Control Engineering Department,muawia15858@hotmail.com
Abstract
Compensators are used to alter the response of a control system in order to accommodate the set design criteria. This is done by
introducing additional poles and zeros to the system. Improving the mass-spring-damper phase margin is an essential so as to
improve its performance. The paper aims to describe short steps to design a phase-lead compensator for the mass-spring-damper
system to achieve the desired level of phase margin for system.
---------------------------------------------------------------------***--------------------------------------------------------------------1. INTRODUCTION
The compensator is an additional device or component used to
improve the system performance. Phase-lead compensator
alters the transient response of the system. Phase-lag
compensator alters the steady state characteristics of the
response. The cascade compensator is usually used in series
with the plant to achieve the required phase margin of the
system [1]. Figure (1) shows the block diagram of a cascaded
compensator with the plant. The cascade compensator's
transfer function is denoted as Gc(s), and the plant as G(s).
Input and output are denoted as R(s) and C(s) respectively.
2. M-S-D TRANSFER FUNCTION
A typical arrangement of the mass-spring-damper system
(ignoring the friction force) is shown in figure (2). To derive
the transfer function, the differential equation was written
using Newton's law as[3]:
M
Where
dx 2
dt 2
+b
dx
dt
+ kx = F
(3)
M= Mass
b = damping constant
k = spring stiffness constant
x = displacement
Typical values used for M, b, and k are:
M= 10 kg, b= 11 n.s/m
and k = 1 n/m.
With a force (F) applied to the mass, the transfer function
(G(s)) of the system taking the force as input and the
displacement x as output will be:
Figure (1) Cascade compensator in the system
G(s) =
The open loop transfer function of the system is given in
equation (1). Equation (2) computes the overall closed loop
system transfer function [2].
Open-loop = Gc(s).G(s)
Closed-loop=
Gc s .G(s)
1+Gc s .G s
(1)
100
10S 2 +11S+1
(4)
This a second order system with a gain of 100.
The phase margin of the system could be found using the
Bode plot[4]. A phase margin (PM) of about 450 is suitable
for the system to have a stable performance.
(2)
The plant G(s) used in the paper was the mass-spring-damper
system. The problem could be simplified in how the phase
margin of the system will be increased to improve the system
performance.
The design problem is how to improve the phase margin of the
system?
__________________________________________________________________________________________________
Volume: 02 Issue: 07 | Jul-2013, Available @ http://www.ijret.org
135
IJRET: International Journal of Research in Engineering and Technology
eISSN: 2319-1163 | pISSN: 2321-7308
Note that if < 1 the general form of the compensator
represents a phase-lag compensator.
Values of and T must be found to complete the phase-lead
compensator design.
To find value the sine rule[7] was used as shown in
equation (6)
sin(PM) =
Figure (2) Mass-spring-damper system
1
+1
(6)
Thus sin(3) =
from which = 3. Now the transfer
+1
function takes the form shown in equation (7).
3. COMPENSATOR DESIGN STEPS
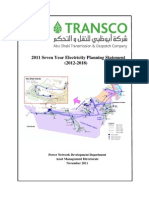
At first the current phase margin of the system (without
compensation) was investigated using the Bode plot. Matlab
command (margin) was used for checking the current phase
margin. This is shown in figure (2).
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 19.8 deg (at 3.08 rad/sec)
1+ 3TS
(7)
1+Ts
The next step is to find the value of T. We have the magnitude
of the compensator at maximum phase shift equal to -20*Log
() dB [6]. Thus
40
-20*Log(3) = 9.54 dB
Magnitude (dB)
20
0
(8)
The max magnitude of the phase Lead occurs half way
between poles and zeros frequencies therefore[7]:
-20
-40
m =
-60
Phase (deg)
(9)
m meets the Half of the magnitude of the max phase-lead
shift.
-45
-90
-135
-180
-3
10
-2
10
-1
10
10
10
10
Frequency (rad/sec)
The half magnitude = (0.5)(9.54) = -4.77 dB . From Bode
plot this value meets m = 4 rad/s .substituting this value in
equation (9) yields:
T=
Figure (2) Phase margin of the system before compensation
Figure (2) shows that the phase margin of the mass-springdamper system equal to 19.8 degree 200.
The design aims to increase the phase margin to 450. The
next step done was to calculate the phase margin difference
between the current phase and the desired phase margin
namely 450 - 200 = 250.
A phase margin of 50 is added as a safety margin 5]. The
phase margin to be compensated will be 300.
The
compensator standard form of the phase- lead compensator
takes the form shown in equation (5) as shown below [6].
1+ TS
1+Ts
> 1
Where = p/z , the ratio of pole to zero.
= 0.14
4 3
(10)
Substituting values of and T in the standard form of the
compensator shown in equation (5) yields the transfer function
of the required phase-lead compensator as shown in equation
(11).
Gc(s) =
1+ 0.42S
(11)
1+0.14S
Referring to figure (1) this compensator is inserted in cascade
before the M-S-D transfer function.
The loop transfer function as explained in equation (1) is
found as:
G(s).Gc(s) =
(5)
42S+100
1.4S 3 +11.54S 2 +11.14S+1
(12)
The Bode plot of the system's loop transfer was found as
shown in figure (3).
__________________________________________________________________________________________________
Volume: 02 Issue: 07 | Jul-2013, Available @ http://www.ijret.org
136
IJRET: International Journal of Research in Engineering and Technology
phase margin was probably narrow. A lead compensator was
designed and added to the system to increase its phase margin
to 450. After the compensator was designed and inserted in
cascade with the system, the desired phase margin was
obtained. PID controller may designed for the system to
improve its closed loop characteristics.
Bode Diagram
Gm = Inf dB (at Inf rad/sec) , Pm = 45.1 deg (at 4.09 rad/sec)
Magnitude (dB)
50
-50
6. REFERENCES
-100
0
-45
Phase (deg)
eISSN: 2319-1163 | pISSN: 2321-7308
-90
-135
-180
-3
10
-2
10
-1
10
10
10
10
10
Frequency (rad/sec)
Figure (3): The 450 required PM of the system
Note that the required phase margin was obtained.
4. RESULT DISCUSSION
The steps followed in the design obtained exactly the required
phase margin of M-S-D system. Matlab command (margin)
was very useful in the design procedure. The steps taken in the
design procedure are summarized as:
Step 1: Check the frequency response of the system before
starting the compensation procedure and note the phase
margin.
Step 2: Find the difference between the system phase margin
and the required phase margin.
Step 3: Add five degree to the difference as safety margin and
find the required phase margin to be compensated.
Step 4: Use the sine law to find then find the half of the
maximum magnitude from -20*Log and find the
corresponding frequency m and use equation (9) to find T.
Step 5: Construct the compensator, insert it in cascade with the
system, and check the desired phase margin of the system'
loop.
[1] Katsuhiko Ogata, "Modern Control Engineering", PrenticeHall, Inc., 1997 pp 405-407.
[2] Chi-Tsong, "Analog and Digital Control System Design",
state university of New York, pp 95-96.
[3] Hugh Jack, "Dynamic System Modelling and Control ",
Copyright 1993-2003 Hugh Jack, pp 354-355.
[4] Rife, D.D. and Vanderkooy, J. (1989) Transfer Function
Measurement with Maximum-Length Sequences, J. Audio
Eng. Soc., Vol. 37, No. 6, pp.419-443.
[5] what is meant by frequency response, available at
http://www.dsp.stackexchange.com/questions/536/what-ismeant-by-a-systems-impulse-response-and-frequencyresponse, accessed on 30/6/2013.
[6] S. K. Bhattacharya, "Control System Engineering",
Pearson Education India, 2008,pp 10.1-10.2.
[7] Norman S. Nise, "Control Systems Engineering",John
Wiley and Sons, 2004, pp 703-704.
The step response of the compensated system can also be plot
to study the transient response characteristics. The
compensator has added a new pole to the two poles of the MS-D system. The three poles were found by using the Matlab
command (pole).
P1 = -7.1429
P2 = -1.0000
P3 = -0.1000.
Note that since the first pole (-7.1429) is located to the left of
the other two poles, the characteristics of the transient
response will get better.
5. CONCLUSIONS
In this paper the transfer function of the mass-spring-damper
system was modelled and its phase margin was checked. The
__________________________________________________________________________________________________
Volume: 02 Issue: 07 | Jul-2013, Available @ http://www.ijret.org
137
Вам также может понравиться
- Control ReportДокумент15 страницControl ReportKenshow Large50% (2)
- Analytical Compensator Design in Frequency DomainДокумент3 страницыAnalytical Compensator Design in Frequency DomainMichael MaysОценок пока нет
- Lead Compensator Design Using Root Locus Techniques: ObjectivesДокумент5 страницLead Compensator Design Using Root Locus Techniques: ObjectivesDoodee MohammedОценок пока нет
- Lead-Lag Compensator PDFДокумент3 страницыLead-Lag Compensator PDFRaja PatelОценок пока нет
- Design Phase Lead and Lag CompensatorsДокумент8 страницDesign Phase Lead and Lag CompensatorsNuradeen MagajiОценок пока нет
- Pneumatic Positioning Device Coupled With Piezoelectric Self-Moving MechanismДокумент9 страницPneumatic Positioning Device Coupled With Piezoelectric Self-Moving Mechanismno nameejjОценок пока нет
- Controlling of Temperature and Humidity For An InfДокумент9 страницControlling of Temperature and Humidity For An InfAuria RiaОценок пока нет
- Introduction To ICTДокумент4 страницыIntroduction To ICTMariel Marfa UnatoОценок пока нет
- Compensator For Control SystemДокумент56 страницCompensator For Control SystembhaskarОценок пока нет
- Design of Lag Lead CompensatorДокумент16 страницDesign of Lag Lead CompensatorJacobОценок пока нет
- Designing Lead and Lag Compensators for Control SystemsДокумент3 страницыDesigning Lead and Lag Compensators for Control SystemsShiva Bhasker ReddyОценок пока нет
- MCQ in Calculus Part 1 ECE Board ExamДокумент10 страницMCQ in Calculus Part 1 ECE Board ExamxXx uuОценок пока нет
- Lag, Lead, Lead-Lag - Compensation in Control SystemДокумент11 страницLag, Lead, Lead-Lag - Compensation in Control SystemShah Jay100% (1)
- Lead Lag and Lag-Lead Compensator DesignДокумент90 страницLead Lag and Lag-Lead Compensator DesignSrinathОценок пока нет
- PCF Interactions: 5G Standalone Access Registration: 1:Npcf - Ampolicycontrol - Create RequestДокумент1 страницаPCF Interactions: 5G Standalone Access Registration: 1:Npcf - Ampolicycontrol - Create RequestAbhay SharmaОценок пока нет
- Lesson 7 Opportunities, Challenges, Problems, and IssuesДокумент7 страницLesson 7 Opportunities, Challenges, Problems, and IssuesKisha Dela Cruz LasamОценок пока нет
- Soil PH Level For Agriculture LandДокумент4 страницыSoil PH Level For Agriculture LandVIVA-TECH IJRIОценок пока нет
- Control Systems Compensator DESIGN Via Root Locus PDFДокумент34 страницыControl Systems Compensator DESIGN Via Root Locus PDFm_umair72001100% (2)
- Temperature Control Waterbath Control System Using PID ControllerДокумент5 страницTemperature Control Waterbath Control System Using PID ControllerReno Sandy YusufОценок пока нет
- Intro to Differential Equations (DiffEqДокумент35 страницIntro to Differential Equations (DiffEqVincent Allen Corbilla IIОценок пока нет
- Current Differential Protection for Tapped LinesДокумент14 страницCurrent Differential Protection for Tapped Liness_elangoovanОценок пока нет
- POM SyllabusДокумент2 страницыPOM SyllabusMehul JainОценок пока нет
- FST Dfs Dnp3 EthernetДокумент4 страницыFST Dfs Dnp3 EthernetEric DunnОценок пока нет
- Totally Integrated Power ProtectionДокумент38 страницTotally Integrated Power Protectionvthiseas100% (1)
- Control System Engineering by Nagoor KaniДокумент398 страницControl System Engineering by Nagoor KaniKR RamanОценок пока нет
- Lead compensator design reduces settling timeДокумент11 страницLead compensator design reduces settling timeHakimi BobОценок пока нет
- Electric Circuit, Connections, ConditionsДокумент28 страницElectric Circuit, Connections, ConditionsMa Cecelia BorjaОценок пока нет
- Various Operating States in Power System and Their Control StrategiesДокумент25 страницVarious Operating States in Power System and Their Control Strategiesmanu_ram1Оценок пока нет
- App Note DC DC Stability V2Документ17 страницApp Note DC DC Stability V2ranjitheee1292Оценок пока нет
- Fundamentals of Power System EconomicsДокумент31 страницаFundamentals of Power System EconomicsAmol JavahireОценок пока нет
- Layered architectures and application of TCP/IP protocolsДокумент27 страницLayered architectures and application of TCP/IP protocolsManish KumarОценок пока нет
- Transmission and Distribution Systems BasicsДокумент113 страницTransmission and Distribution Systems BasicsAbdul HaseebОценок пока нет
- ECE Review Specialist Mobile CommunicationsДокумент82 страницыECE Review Specialist Mobile CommunicationsRaven CabanatanОценок пока нет
- The Evolution and Future of Wired CommunicationsДокумент2 страницыThe Evolution and Future of Wired CommunicationsHubert SemenianoОценок пока нет
- Esico Vs Alphaland Corporation and Alphaland Development IncДокумент22 страницыEsico Vs Alphaland Corporation and Alphaland Development IncKateОценок пока нет
- 5G Standalone Access Registration AMF InteractionsДокумент5 страниц5G Standalone Access Registration AMF InteractionsHabeeb MustafaОценок пока нет
- Filter Design Assignment 2016-17 EE 338: Digital Signal ProcessingДокумент17 страницFilter Design Assignment 2016-17 EE 338: Digital Signal ProcessingShashank OvОценок пока нет
- SCADA System Blog - Hands-On Lab for Developing a Next Generation SCADA SystemДокумент104 страницыSCADA System Blog - Hands-On Lab for Developing a Next Generation SCADA Systemafrica threeОценок пока нет
- Mobile Radio CommunicationsДокумент37 страницMobile Radio CommunicationsdeardestinyОценок пока нет
- Seven Year Electricity Planning Statement-Main-reportДокумент85 страницSeven Year Electricity Planning Statement-Main-report2003vinayОценок пока нет
- Basic Electrical Power Fundamentals PDFДокумент6 страницBasic Electrical Power Fundamentals PDFAnthony MucciОценок пока нет
- UE Interactions: 5G Standalone Access Registration: 2:Msg1: PreambleДокумент5 страницUE Interactions: 5G Standalone Access Registration: 2:Msg1: PreambleSumit SaxenaОценок пока нет
- What Is Data TransmissionДокумент17 страницWhat Is Data Transmissionsinghashish5444Оценок пока нет
- Ee1401 Power System Operation and Control Energy Control Center SafetyДокумент3 страницыEe1401 Power System Operation and Control Energy Control Center Safetysrmce100% (1)
- OPC Based Distributed Real Time Simulation of Complex Continuous ProcessesДокумент25 страницOPC Based Distributed Real Time Simulation of Complex Continuous Processessina20795Оценок пока нет
- Bode Plots: 1 Control Lectures by Lubn MoinДокумент30 страницBode Plots: 1 Control Lectures by Lubn MoinSadaqat RizviОценок пока нет
- Philippine Electronics Code - Volume 1 - IdentificationДокумент4 страницыPhilippine Electronics Code - Volume 1 - IdentificationDonovan Paul Uy DoroinОценок пока нет
- Mechatronics - PLC ReportДокумент51 страницаMechatronics - PLC ReportEarl FloresОценок пока нет
- Distributed System IntroДокумент30 страницDistributed System IntroShivam KumarОценок пока нет
- Power Quality in Electrical Systems - SoftwareДокумент6 страницPower Quality in Electrical Systems - Softwareb33lawОценок пока нет
- PEE Practices in The Philippines - V2Документ44 страницыPEE Practices in The Philippines - V2MAKANОценок пока нет
- VLSI, VLSI System & VLSI System DesignДокумент26 страницVLSI, VLSI System & VLSI System Designrohit_sreerama4040Оценок пока нет
- PID Temp. ControllerДокумент8 страницPID Temp. ControllerHowardgfОценок пока нет
- Digital Control TutorialДокумент27 страницDigital Control TutorialNatalia BonillaОценок пока нет
- VI Sem ECEДокумент12 страницVI Sem ECESenthil Kumar KrishnanОценок пока нет
- Control System Question BankДокумент12 страницControl System Question Banksagar R RaoОценок пока нет
- Optimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachДокумент6 страницOptimal PID Controller Design of An Inverted Pendulum Dynamics A Hybrid Pole-Placement and Firefly Algorithm ApproachAraceli CastruitaОценок пока нет
- Multiobjective Control Systems Design by Genetic AlgorithmsДокумент6 страницMultiobjective Control Systems Design by Genetic AlgorithmsnainaОценок пока нет
- Robust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduДокумент4 страницыRobust Controller Design For Uncertain Systems: Shreesha.c@manipal - EduInnovative Research PublicationsОценок пока нет
- QB BcsДокумент10 страницQB BcsKrishna Reddy Y.VОценок пока нет
- PTE 3 Week Study ScheduleДокумент3 страницыPTE 3 Week Study ScheduleesatjournalsОценок пока нет
- An Improved Geo-Encryption Algorithm in Location Based Services PDFДокумент4 страницыAn Improved Geo-Encryption Algorithm in Location Based Services PDFesatjournalsОценок пока нет
- An Efficient Information Retrieval Ontology System Based Indexing For Context PDFДокумент7 страницAn Efficient Information Retrieval Ontology System Based Indexing For Context PDFesatjournalsОценок пока нет
- Analysis and Optimization of Sand Casting Defects With The Help of Artificial Neural Network PDFДокумент6 страницAnalysis and Optimization of Sand Casting Defects With The Help of Artificial Neural Network PDFesatjournalsОценок пока нет
- A Study and Survey On Various Progressive Duplicate Detection MechanismsДокумент3 страницыA Study and Survey On Various Progressive Duplicate Detection MechanismsesatjournalsОценок пока нет
- Analytical Assessment On Progressive Collapse Potential of New Reinforced Concrete Framed Structure PDFДокумент5 страницAnalytical Assessment On Progressive Collapse Potential of New Reinforced Concrete Framed Structure PDFesatjournalsОценок пока нет
- Analysis of Outrigger System For Tall Vertical Irregularites Structures Subjected To Lateral Loads PDFДокумент5 страницAnalysis of Outrigger System For Tall Vertical Irregularites Structures Subjected To Lateral Loads PDFesatjournalsОценок пока нет
- Analysis and Design of A Multi Compartment Central Cone Cement Storing Silo PDFДокумент7 страницAnalysis and Design of A Multi Compartment Central Cone Cement Storing Silo PDFesatjournalsОценок пока нет
- Analysis and Characterization of Dendrite Structures From Microstructure Images of Material PDFДокумент5 страницAnalysis and Characterization of Dendrite Structures From Microstructure Images of Material PDFesatjournalsОценок пока нет
- Analysis and Optimization of Electrodes For Improving The Performance of Ring Laser Gyro PDFДокумент4 страницыAnalysis and Optimization of Electrodes For Improving The Performance of Ring Laser Gyro PDFesatjournalsОценок пока нет
- An Octa-Core Processor With Shared Memory and Message-Passing PDFДокумент10 страницAn Octa-Core Processor With Shared Memory and Message-Passing PDFesatjournalsОценок пока нет
- Analysis of Cylindrical Shell Structure With Varying Parameters PDFДокумент6 страницAnalysis of Cylindrical Shell Structure With Varying Parameters PDFesatjournalsОценок пока нет
- A Comparative Investigation On Physical and Mechanical Properties of MMC Reinforced With Waste Materials PDFДокумент7 страницA Comparative Investigation On Physical and Mechanical Properties of MMC Reinforced With Waste Materials PDFesatjournalsОценок пока нет
- A Review On Fake Biometric Detection System For Various ApplicationsДокумент4 страницыA Review On Fake Biometric Detection System For Various ApplicationsesatjournalsОценок пока нет
- A Review Paper On Smart Health Care System Using Internet of ThingsДокумент5 страницA Review Paper On Smart Health Care System Using Internet of ThingsesatjournalsОценок пока нет
- A Servey On Wireless Mesh Networking ModuleДокумент5 страницA Servey On Wireless Mesh Networking ModuleesatjournalsОценок пока нет
- A New Type of Single-Mode Lma Photonic Crystal Fiber Based On Index-Matching Coupling PDFДокумент8 страницA New Type of Single-Mode Lma Photonic Crystal Fiber Based On Index-Matching Coupling PDFesatjournalsОценок пока нет
- A Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemДокумент8 страницA Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemesatjournalsОценок пока нет
- A Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemДокумент8 страницA Research On Significance of Kalman Filter-Approach As Applied in Electrical Power SystemesatjournalsОценок пока нет
- I JR Et 20160503007dfceДокумент5 страницI JR Et 20160503007dfcegtarun22guptaОценок пока нет
- A Survey On Identification of Ranking Fraud For Mobile ApplicationsДокумент6 страницA Survey On Identification of Ranking Fraud For Mobile ApplicationsesatjournalsОценок пока нет
- A Servey On Wireless Mesh Networking ModuleДокумент5 страницA Servey On Wireless Mesh Networking ModuleesatjournalsОценок пока нет
- A Critical Review On Experimental Studies of Strength and Durability Properties of Fibre Reinforced Concrete Composite PDFДокумент7 страницA Critical Review On Experimental Studies of Strength and Durability Properties of Fibre Reinforced Concrete Composite PDFesatjournalsОценок пока нет
- A Review On Fake Biometric Detection System For Various ApplicationsДокумент4 страницыA Review On Fake Biometric Detection System For Various ApplicationsesatjournalsОценок пока нет
- I JR Et 20160503007dfceДокумент5 страницI JR Et 20160503007dfcegtarun22guptaОценок пока нет
- Ad Hoc Based Vehcular Networking and ComputationДокумент3 страницыAd Hoc Based Vehcular Networking and ComputationesatjournalsОценок пока нет
- A Review Paper On Smart Health Care System Using Internet of ThingsДокумент5 страницA Review Paper On Smart Health Care System Using Internet of ThingsesatjournalsОценок пока нет
- A Three-Level Disposal Site Selection Criteria System For Toxic and Hazardous Wastes in The PhilippinesДокумент9 страницA Three-Level Disposal Site Selection Criteria System For Toxic and Hazardous Wastes in The PhilippinesesatjournalsОценок пока нет
- A Women Secure Mobile App For Emergency Usage (Go Safe App)Документ3 страницыA Women Secure Mobile App For Emergency Usage (Go Safe App)esatjournalsОценок пока нет
- A Survey On Identification of Ranking Fraud For Mobile ApplicationsДокумент6 страницA Survey On Identification of Ranking Fraud For Mobile ApplicationsesatjournalsОценок пока нет
- CAPE-Communication Studies - Forms Context of CommunicationДокумент4 страницыCAPE-Communication Studies - Forms Context of CommunicationVishmeta SeenarineОценок пока нет
- Personality Prediction SystemДокумент6 страницPersonality Prediction SystemMohammad saheemОценок пока нет
- Py TorchДокумент23 страницыPy Torchwilliam50% (2)
- Artificial IntelligenceДокумент4 страницыArtificial IntelligenceSneha DhamijaОценок пока нет
- Matlab and Simulink For Control SystemДокумент35 страницMatlab and Simulink For Control SystemLakshmiОценок пока нет
- Communication PDF DefinitionДокумент2 страницыCommunication PDF DefinitionAaronОценок пока нет
- 30-Hrs Deep Learning & CV Training on Image & Video ProjectsДокумент6 страниц30-Hrs Deep Learning & CV Training on Image & Video ProjectsRaghavendra ShettyОценок пока нет
- Artificial Neural Networks Lab - Neuron Models and Learning AlgorithmsДокумент6 страницArtificial Neural Networks Lab - Neuron Models and Learning AlgorithmsahmedОценок пока нет
- Week7 Fuzzy Logic TutorialДокумент54 страницыWeek7 Fuzzy Logic TutorialGirish PatilОценок пока нет
- Canny Edge Detection Step by Step ProcessДокумент16 страницCanny Edge Detection Step by Step Processsonaiya software solutionsОценок пока нет
- Equivalence LELEC2285 - CSU44053Документ2 страницыEquivalence LELEC2285 - CSU44053Aurélie MaillardОценок пока нет
- ML Super ImpДокумент19 страницML Super Impread4freeОценок пока нет
- Ann Model PaperДокумент7 страницAnn Model PaperHimanshuОценок пока нет
- New Directions On Model Predictive Control PDFДокумент232 страницыNew Directions On Model Predictive Control PDFNana Kwame Adjei-Antwi100% (2)
- Review of Ellis Chapter on Input, Interaction and SLAДокумент14 страницReview of Ellis Chapter on Input, Interaction and SLARizky RamaDhan PerDana100% (1)
- Exploration and Prediction of Fluid Dynamical Systems UsingДокумент22 страницыExploration and Prediction of Fluid Dynamical Systems UsingAshwani SinghОценок пока нет
- A Tiny Machine Learning Model For Point Cloud ObjeДокумент13 страницA Tiny Machine Learning Model For Point Cloud Objerazankhalife4Оценок пока нет
- RoboticsДокумент3 страницыRoboticsGauravSuryawanshiОценок пока нет
- Artificial IntelligenceДокумент7 страницArtificial IntelligencechtganduОценок пока нет
- Decision TreeДокумент28 страницDecision TreeRishabh GuptaОценок пока нет
- Study On The OCR of The Devanagari Script Using CNNДокумент7 страницStudy On The OCR of The Devanagari Script Using CNNIJRASETPublicationsОценок пока нет
- Review Paper - Generative Knowledge Graph Construction - A ReviewДокумент33 страницыReview Paper - Generative Knowledge Graph Construction - A Reviewnguyen van anОценок пока нет
- Design and Analysis of AlgorithmДокумент47 страницDesign and Analysis of AlgorithmAbhijit BodheОценок пока нет
- Deep Learning in Mobile and Wireless Networking: A SurveyДокумент67 страницDeep Learning in Mobile and Wireless Networking: A SurveyBee MUОценок пока нет
- Introduction To PID ControlДокумент6 страницIntroduction To PID ControlIonescu ViorelОценок пока нет
- Oral PresentationДокумент2 страницыOral PresentationDaniel Villa100% (1)
- Automatic Speech Recognition (Attempt) : ECE 113DB Final Project, Winter 2019 Fong Chi Ho, Zijun Sun, Shao Xiong LeeДокумент4 страницыAutomatic Speech Recognition (Attempt) : ECE 113DB Final Project, Winter 2019 Fong Chi Ho, Zijun Sun, Shao Xiong LeeKen KОценок пока нет
- Convergence of LMS AlgorithmДокумент9 страницConvergence of LMS AlgorithmsivadanamsОценок пока нет
- Areas of Artificial Intelligence Control in Chemical Process IndustriesДокумент3 страницыAreas of Artificial Intelligence Control in Chemical Process IndustriesangellaОценок пока нет
- MSDS Ljmu Submission FormДокумент15 страницMSDS Ljmu Submission FormRohit VoraОценок пока нет