Вам также может понравиться
- PH Measurement BasicsДокумент8 страницPH Measurement Basicsviralshukla85Оценок пока нет
- Potentiometric Titration Curve Determines Unknown Acid pKaДокумент3 страницыPotentiometric Titration Curve Determines Unknown Acid pKaDaniele Joseph HizonОценок пока нет
- Experiment 4 - Potentiometric TitrationДокумент11 страницExperiment 4 - Potentiometric TitrationJoemer Absalon Adorna100% (2)
- ANN Based PH Control ReportДокумент36 страницANN Based PH Control ReportSumit GuptaОценок пока нет
- ElectrochemicalAnalysis Manual Part 2Документ14 страницElectrochemicalAnalysis Manual Part 2estraj1954Оценок пока нет
- Maintaining Constant pH: Blood Buffer System and Factors Affecting Buffer CapacityДокумент31 страницаMaintaining Constant pH: Blood Buffer System and Factors Affecting Buffer CapacityJoyce Castil (Joyceee)Оценок пока нет
- Acid Base TitrationДокумент12 страницAcid Base TitrationMsfaeza HanafiОценок пока нет
- PH Control SimulationДокумент14 страницPH Control SimulationJohn Walter Ticona QuispeОценок пока нет
- Determine pH of samples using a pH meterДокумент5 страницDetermine pH of samples using a pH meterAjuba AbujaОценок пока нет
- Labexercise 2Документ7 страницLabexercise 2Ma Catherine MalanogОценок пока нет
- Expt.1 BiochemДокумент4 страницыExpt.1 BiochemMc de RamosОценок пока нет
- CPB 30103 Biochemical Engineering UniKL MICET Experiment 1: Preparation of Buffer Solution Full Lab ReportДокумент10 страницCPB 30103 Biochemical Engineering UniKL MICET Experiment 1: Preparation of Buffer Solution Full Lab ReportSiti Hajar Mohamed0% (1)
- Instrumentation and Control in Bio ReactorsДокумент4 страницыInstrumentation and Control in Bio ReactorsJonathan Arredondo50% (2)
- Team 2, Lab 1 - Determination of The Concentration of Ethanoic Acid in Commercial VinegarДокумент24 страницыTeam 2, Lab 1 - Determination of The Concentration of Ethanoic Acid in Commercial VinegarAlondra Fernández AcadémicoОценок пока нет
- Temperature Compensation in PH Meter-A Survey: April 2015Документ10 страницTemperature Compensation in PH Meter-A Survey: April 2015Deepakrao Bornare PatilОценок пока нет
- GA7 Potentio Titr Rev7 99Документ9 страницGA7 Potentio Titr Rev7 99Jerome SadudaquilОценок пока нет
- USP791 PHДокумент4 страницыUSP791 PHJoaquín Andrés Aravena PérezОценок пока нет
- Acid Rain IIДокумент3 страницыAcid Rain IIMaxWittОценок пока нет
- PH Theory Guide - EN - 230113 PDFДокумент98 страницPH Theory Guide - EN - 230113 PDFraiedОценок пока нет
- PH GuideДокумент57 страницPH GuideKshitij MehtaОценок пока нет
- PH USPДокумент4 страницыPH USPAhmad Abdalraheem AamerОценок пока нет
- Experiment 1 Preparation of Buffer SolutionsДокумент16 страницExperiment 1 Preparation of Buffer Solutionsmohamad ashaziq89% (56)
- AP Chemistry - Titration Curves of Strong and Weak Acids and BasesДокумент5 страницAP Chemistry - Titration Curves of Strong and Weak Acids and BasesJonathan Chen100% (2)
- Determination of pKa for Weak AcidДокумент5 страницDetermination of pKa for Weak AcidSonu DubeyОценок пока нет
- Potentiometric TitrationДокумент9 страницPotentiometric Titrationiah_guevarraОценок пока нет
- CSTR Behavior and Saponification Reaction KineticsДокумент7 страницCSTR Behavior and Saponification Reaction KineticsMohammad MdardasОценок пока нет
- PI Exp9 CompiledДокумент12 страницPI Exp9 CompiledZaid SalmanОценок пока нет
- 62 Experiment #5. Titration of An Acid Using A PH MeterДокумент7 страниц62 Experiment #5. Titration of An Acid Using A PH MeteryumnatehreemОценок пока нет
- Laporan Kimdal Percobaan Unit 1Документ7 страницLaporan Kimdal Percobaan Unit 1rulmadhaniОценок пока нет
- Oecd Guidelines For The Testing of ChemicalsДокумент6 страницOecd Guidelines For The Testing of ChemicalsNikita La CruzОценок пока нет
- Experiment 1: Determination of Total Acidity of Vinegar: Final Laboratory ReportДокумент13 страницExperiment 1: Determination of Total Acidity of Vinegar: Final Laboratory ReportEunice OpinioОценок пока нет
- 1019 ADI CFTL Industrial Water Quality Measurement WhitepaperДокумент10 страниц1019 ADI CFTL Industrial Water Quality Measurement WhitepaperGhraib Rady ObaidОценок пока нет
- Measure pH and Prepare BuffersДокумент6 страницMeasure pH and Prepare BuffersSheena PasionОценок пока нет
- Experiment 1 Experiment 1 Experiment 1 Experiment 1 Experiment 1Документ6 страницExperiment 1 Experiment 1 Experiment 1 Experiment 1 Experiment 1Shailesh GhildiyalОценок пока нет
- Automated PH Controller System For HydroponicДокумент5 страницAutomated PH Controller System For HydroponicChaitanya Sunkara50% (2)
- Determination Acetic AcidДокумент21 страницаDetermination Acetic Acidameyakem100% (1)
- CH142Exp5Titration PDFДокумент7 страницCH142Exp5Titration PDFSako RasheedОценок пока нет
- PH in Blood Experimental Model of A Blood Buffer and Its BufДокумент5 страницPH in Blood Experimental Model of A Blood Buffer and Its Bufbashar.adamat101Оценок пока нет
- Chem 18.1 Experiment 6 Formal ReportДокумент5 страницChem 18.1 Experiment 6 Formal Reportlouize_1496Оценок пока нет
- 〈791〉 pHДокумент4 страницы〈791〉 pHThu PhamОценок пока нет
- Weak Acid Strong Base Titration LabДокумент8 страницWeak Acid Strong Base Titration Labapi-265089380100% (1)
- Sub-Physical Pharmacy, B. Pharm, 3 Semester Unit - V: PH, Buffers and Isotonic SolutionsДокумент21 страницаSub-Physical Pharmacy, B. Pharm, 3 Semester Unit - V: PH, Buffers and Isotonic Solutionssatheeshpharma6Оценок пока нет
- PH MEASUREMENT AND BUFFER PREPARATIONДокумент3 страницыPH MEASUREMENT AND BUFFER PREPARATIONJuan Carlos100% (1)
- Exp 3 - Acid Daffa Madri AthaДокумент6 страницExp 3 - Acid Daffa Madri Athadaffa MadriОценок пока нет
- Lab Report DETERMINATION OF THE CONCENTRATION OF ACETIC ACID IN VINEGARДокумент27 страницLab Report DETERMINATION OF THE CONCENTRATION OF ACETIC ACID IN VINEGARمحمد ازوادي100% (1)
- Lab 1 Determination of Acetic Acid in VinegarДокумент17 страницLab 1 Determination of Acetic Acid in Vinegarieja03100% (4)
- P HmetryДокумент4 страницыP Hmetrydhungelsubhash8154Оценок пока нет
- Potentiometric Titration Ex17Документ10 страницPotentiometric Titration Ex17Tien HaminhОценок пока нет
- PH and PH MeterДокумент15 страницPH and PH MeterMuhammad Arshad Ali100% (1)
- PH, Buffers and Isotonic SolutionsДокумент44 страницыPH, Buffers and Isotonic SolutionsNEEMASUBIN100% (1)
- LAB REPORT - Determination of Concentration Acetic Acid in VinegarДокумент12 страницLAB REPORT - Determination of Concentration Acetic Acid in Vinegarhisham100% (3)
- Universidad de Las Américas PueblaДокумент8 страницUniversidad de Las Américas PueblaJesus Alfredo LMОценок пока нет
- Mixture of Carbonate BicarbonateДокумент9 страницMixture of Carbonate BicarbonateIan Justine SanchezОценок пока нет
- Carbonate-Bicarbonate Mixture Anal Chem Post LabДокумент7 страницCarbonate-Bicarbonate Mixture Anal Chem Post LabKennedy OrtegaОценок пока нет
- Acid/Base Titration LabДокумент5 страницAcid/Base Titration LabDavid GrahamОценок пока нет
- Preparative Chromatography for Separation of ProteinsОт EverandPreparative Chromatography for Separation of ProteinsArne StabyОценок пока нет
- Advanced Pharmaceutical analysisОт EverandAdvanced Pharmaceutical analysisРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Enzyme Kinetics: Rapid-Equilibrium Applications of MathematicaОт EverandEnzyme Kinetics: Rapid-Equilibrium Applications of MathematicaОценок пока нет
- L4dxvFAQ1yt15J4cj4jo - PH Control Presentation7Документ5 страницL4dxvFAQ1yt15J4cj4jo - PH Control Presentation7Stephy Florez MenesesОценок пока нет
- Residential Photovoltaic Energy Storage SystemДокумент10 страницResidential Photovoltaic Energy Storage SystemStephy Florez MenesesОценок пока нет
- SimonaДокумент15 страницSimonaStephy Florez MenesesОценок пока нет
- LEDs and Solid-State Lighting History, Benefits, and FundamentalsДокумент82 страницыLEDs and Solid-State Lighting History, Benefits, and FundamentalsOrhan BayhanОценок пока нет
- Texas OptoelectronicsTheoryPracticeДокумент464 страницыTexas OptoelectronicsTheoryPracticeStephy Florez Meneses100% (1)
- FSK Demodulator/ Tone Decoder: ... The Analog Plus CompanyДокумент24 страницыFSK Demodulator/ Tone Decoder: ... The Analog Plus CompanyLuis Fernando RojasОценок пока нет
- ArubaДокумент13 страницArubaStephy Florez MenesesОценок пока нет
- At-3 1Документ72 страницыAt-3 1Javier RobletoОценок пока нет
- Pipe Welding Electrodes 1Документ5 страницPipe Welding Electrodes 1Adura OgunnuОценок пока нет
- Oxidations With Cerium Sulphate SolutionsДокумент4 страницыOxidations With Cerium Sulphate Solutionsliz_hobbs79Оценок пока нет
- G S Earth WireДокумент10 страницG S Earth WiresaratОценок пока нет
- Lime Neutralization Wastewater TreatmentДокумент15 страницLime Neutralization Wastewater TreatmentMehrdad AminkazemiОценок пока нет
- NA To Sls en 1993-5Документ14 страницNA To Sls en 1993-5Shan Sandaruwan AbeywardeneОценок пока нет
- Chapter 20-The First Law of Thermodynamics: Multiple ChoiceДокумент13 страницChapter 20-The First Law of Thermodynamics: Multiple ChoiceJhajha AlboniaОценок пока нет
- EOC c20 Ionic EquilibriaДокумент3 страницыEOC c20 Ionic EquilibriaKenneth KnightОценок пока нет
- Chemistry Assignment and Project 2Документ13 страницChemistry Assignment and Project 2Guru SrinivaasОценок пока нет
- Estudio Antifouling PDFДокумент12 страницEstudio Antifouling PDFJuanIgnacioIzquierdoОценок пока нет
- Eni Blasia 220Документ2 страницыEni Blasia 220hamadaОценок пока нет
- Day 1 Mock Board Exam QuestionsДокумент9 страницDay 1 Mock Board Exam QuestionsXZ Louise Pauleen PalmaresОценок пока нет
- IOGCA 2019 Conference Proceedings PDFДокумент295 страницIOGCA 2019 Conference Proceedings PDFadityamduttaОценок пока нет
- Rectangular Cooling Water Tank Design CalculationsДокумент43 страницыRectangular Cooling Water Tank Design CalculationsNguyễn Quốc PhượngОценок пока нет
- (Version 3.0) Effectiveness of Banana (Musa Paradisiaca) Peel As An Alternative Floor WaxДокумент2 страницы(Version 3.0) Effectiveness of Banana (Musa Paradisiaca) Peel As An Alternative Floor WaxAlexis Barquilla0% (1)
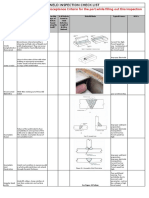
- Weld Inspection Check ListДокумент3 страницыWeld Inspection Check ListBGRLОценок пока нет
- Chapter 27 Static Fluids Chapter 27 Static Fluids ............................................................... 2Документ17 страницChapter 27 Static Fluids Chapter 27 Static Fluids ............................................................... 2Fernando ArrudaОценок пока нет
- Sulphuric Acid MSDSДокумент1 страницаSulphuric Acid MSDSGermán Cárdenas AlvarezОценок пока нет
- Groovy ICP ETCHER SST G Vinogradov - Apr05Документ7 страницGroovy ICP ETCHER SST G Vinogradov - Apr05Peter-sagami100% (1)
- Mole Funsheet 2Документ1 страницаMole Funsheet 2Sk Aul DherОценок пока нет
- Tankguard Storage: Technical Data Sheet Application GuideДокумент14 страницTankguard Storage: Technical Data Sheet Application GuideEngTamerОценок пока нет
- Ah-Polypropylene Case Pressure GaugeДокумент3 страницыAh-Polypropylene Case Pressure Gaugepankaj doshiОценок пока нет
- Mark Scheme (Results) January 2023Документ28 страницMark Scheme (Results) January 2023Rohee TariqОценок пока нет
- Ueditor PHP Upload File 20201124 1606185891368047Документ4 страницыUeditor PHP Upload File 20201124 1606185891368047Banse El-RahmanОценок пока нет
- Fosroc Solvent 102 resin cleaning solventДокумент2 страницыFosroc Solvent 102 resin cleaning solventShaikhRizwanОценок пока нет
- Revised NEQSДокумент10 страницRevised NEQSKhalid Masood GhaniОценок пока нет
- The Chemical Accidents (Emergency Planning, Preparedness and Response) Rules, 1996Документ44 страницыThe Chemical Accidents (Emergency Planning, Preparedness and Response) Rules, 1996erbhaveshparmarОценок пока нет
- Physical Electronics PDFДокумент4 страницыPhysical Electronics PDFSharath Poikayil SatheeshОценок пока нет
- Alamat Perusahaan Perusahaan Di CilegonДокумент19 страницAlamat Perusahaan Perusahaan Di CilegonSri RahayuОценок пока нет
- Production Report November 2021Документ9 страницProduction Report November 2021nasir ahmedОценок пока нет
- Indian Pharmacopoeia 2020 - Vol. 1 (PART 2)Документ242 страницыIndian Pharmacopoeia 2020 - Vol. 1 (PART 2)the reader100% (1)