Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Child Support For Adult ChildrenДокумент12 страницChild Support For Adult ChildrenBantug De Ocampo JinkeeОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Volleyball Unit PlanДокумент45 страницVolleyball Unit Planapi-347625375Оценок пока нет
- Nursing MGT For StrokeДокумент7 страницNursing MGT For StrokeRubijen NapolesОценок пока нет
- Guru Tattva - Freedom VidyaДокумент4 страницыGuru Tattva - Freedom VidyaRavan SharmaОценок пока нет
- Leadership and Followership Ebook PrintableДокумент173 страницыLeadership and Followership Ebook PrintableEslam NourОценок пока нет
- KINESIOTHERAPHYДокумент40 страницKINESIOTHERAPHYJeyarajasekar TtrОценок пока нет
- Feral and Stray Cats - An Important Difference: BehaviorДокумент4 страницыFeral and Stray Cats - An Important Difference: BehaviorVinayak RaoОценок пока нет
- 76th Peterborough Kiwanis Music Festival ProgramДокумент16 страниц76th Peterborough Kiwanis Music Festival ProgramPeterborough ExaminerОценок пока нет
- History of Clinical PsychologyДокумент3 страницыHistory of Clinical PsychologyaeetjcduvОценок пока нет
- 2012 Introducing Health and Well-BeingДокумент24 страницы2012 Introducing Health and Well-BeingvosoОценок пока нет
- Anatomy Syllabus 2013-14Документ13 страницAnatomy Syllabus 2013-14احمد كرمОценок пока нет
- Structure & Functionality of Edible FatsДокумент26 страницStructure & Functionality of Edible Fats陳宗澤Оценок пока нет
- Mathematics7 Q1 M14 v1 (Final)Документ30 страницMathematics7 Q1 M14 v1 (Final)Rainman InsanityОценок пока нет
- Folstein Mini-Mental State Exam: Record Each AnswerДокумент4 страницыFolstein Mini-Mental State Exam: Record Each AnswerNeil AlviarОценок пока нет
- US University Guide For JC StudentsДокумент20 страницUS University Guide For JC Studentsvominhtu_acjcОценок пока нет
- 0 Title 1Документ12 страниц0 Title 1RODJHEN ANNE P. BARQUILLAОценок пока нет
- Areas of Normal CurveДокумент24 страницыAreas of Normal CurveJoyzmarv Aquino100% (1)
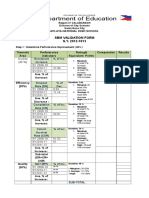
- SBM VAlidation FormДокумент2 страницыSBM VAlidation FormamerizaОценок пока нет
- Business Canadian 8th Edition Griffin Test Bank DownloadДокумент48 страницBusiness Canadian 8th Edition Griffin Test Bank DownloadEric Pepper100% (28)
- Curriculum Map QUarter 1 G12Документ3 страницыCurriculum Map QUarter 1 G12Rose Angela Mislang UliganОценок пока нет
- Jesse Balaban-Feld - CVДокумент4 страницыJesse Balaban-Feld - CVapi-337804038Оценок пока нет
- The Effect of Modular Distance Learning in Academic Behavior and Performance Among Senior HighДокумент19 страницThe Effect of Modular Distance Learning in Academic Behavior and Performance Among Senior HighJESSIE DELA CRUZОценок пока нет
- Yield Stress Sa 240 304Документ1 страницаYield Stress Sa 240 304faizalОценок пока нет
- IB Business IA Step-by-Step GuideДокумент15 страницIB Business IA Step-by-Step GuideTalal M. HashemОценок пока нет
- Translating A Competency Standard Into A Competency-Based CurriculumДокумент11 страницTranslating A Competency Standard Into A Competency-Based Curriculumxycor madlaОценок пока нет
- Designing Type A and Type B Syllabuses - Advantages and DisadvantagesДокумент12 страницDesigning Type A and Type B Syllabuses - Advantages and Disadvantagesjamel_terzi_alimi100% (7)
- Relative Clauses Grammar ReferenceДокумент2 страницыRelative Clauses Grammar ReferencemariecbaОценок пока нет
- Question Aware Vision Transformer For Multimodal ReasoningДокумент15 страницQuestion Aware Vision Transformer For Multimodal ReasoningOnlyBy MyselfОценок пока нет
- Queens Alumni Review 2012 - Spotlight: Bruce AlexanderДокумент2 страницыQueens Alumni Review 2012 - Spotlight: Bruce Alexanderalpha_abebeОценок пока нет
- Reconstruct Lesson Plan - Polynomials - BinoyaДокумент9 страницReconstruct Lesson Plan - Polynomials - BinoyaRICHARD BINOYAОценок пока нет