Вам также может понравиться
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsОт EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsОценок пока нет
- Low Voltage System State Estimation Based On Smart Metering InfrastructureДокумент7 страницLow Voltage System State Estimation Based On Smart Metering InfrastructureMohammad reza eesazadehОценок пока нет
- The Role of Communication Systems in Smart GridsДокумент33 страницыThe Role of Communication Systems in Smart GridsSebastian ConsuegraОценок пока нет
- Sensors: Design and Implementation of High-Availability Architecture For Iot-Cloud ServicesДокумент20 страницSensors: Design and Implementation of High-Availability Architecture For Iot-Cloud Servicesdavid TapsobaОценок пока нет
- A Distributed IoT Infrastructure To Test and Deploy Real-Time Demand Response in Smart GridsДокумент11 страницA Distributed IoT Infrastructure To Test and Deploy Real-Time Demand Response in Smart GridsHélène MillotОценок пока нет
- 031 ICSTCC A Bragarenco - Sensor Actuator (Submit V2)Документ6 страниц031 ICSTCC A Bragarenco - Sensor Actuator (Submit V2)Andrei BragarencoОценок пока нет
- 1 s2.0 S2352467716301783 MainДокумент12 страниц1 s2.0 S2352467716301783 MainJean Baptiste nkongoloОценок пока нет
- Sensors: Integration of Sensors, Controllers and Instruments Using A Novel OPC ArchitectureДокумент26 страницSensors: Integration of Sensors, Controllers and Instruments Using A Novel OPC ArchitecturealОценок пока нет
- HiCH Hierarchical Fog-Assisted Computing Architecture For Healthcare IoTДокумент20 страницHiCH Hierarchical Fog-Assisted Computing Architecture For Healthcare IoTcesi.bigdataОценок пока нет
- AUPEC2017 Paper 149Документ13 страницAUPEC2017 Paper 149pejmanОценок пока нет
- Electronics 08 00972Документ16 страницElectronics 08 00972Muhamad AimanОценок пока нет
- Data Collection and Wireless Communication in Internet of Things (Iot) Using Economic Analysis and Pricing Models: A SurveyДокумент45 страницData Collection and Wireless Communication in Internet of Things (Iot) Using Economic Analysis and Pricing Models: A Surveyanant_nimkar9243Оценок пока нет
- 85 FullManuscript 425 1 10 202104163Документ14 страниц85 FullManuscript 425 1 10 202104163EmarildoОценок пока нет
- Service-Oriented Advanced Metering Infrastructure For Smart GridsДокумент4 страницыService-Oriented Advanced Metering Infrastructure For Smart Gridsbobocel_alexandru32Оценок пока нет
- A Systematic Review On Performance Evaluation Metric Selection MethodДокумент14 страницA Systematic Review On Performance Evaluation Metric Selection MethodECE IATОценок пока нет
- An Overview of Artificial Intelligence Applications For Power ElectronicsДокумент26 страницAn Overview of Artificial Intelligence Applications For Power ElectronicsAngamuthu AnanthОценок пока нет
- Multi-Attribute Missing Data Reconstruction Based On Adaptive Weighted Nuclear Norm Minimization in IotДокумент13 страницMulti-Attribute Missing Data Reconstruction Based On Adaptive Weighted Nuclear Norm Minimization in IotHernanОценок пока нет
- An Internet of Things Device Decoupled System For Portable Applications in Changing ContextsДокумент30 страницAn Internet of Things Device Decoupled System For Portable Applications in Changing ContextsJaime VargasОценок пока нет
- Distributed Online Algorithm For Optimal Real-Time Energy Distribution in The Smart GridДокумент11 страницDistributed Online Algorithm For Optimal Real-Time Energy Distribution in The Smart Grideng_tamer14261848Оценок пока нет
- IoT Based Digital Twin For Energy CyberДокумент19 страницIoT Based Digital Twin For Energy CyberLindo PatoОценок пока нет
- Network Protocols, Schemes, and Mechanisms For Internet of Things (IoT) Features, Open Challenges, and TrendsДокумент25 страницNetwork Protocols, Schemes, and Mechanisms For Internet of Things (IoT) Features, Open Challenges, and TrendsThomas LagkasОценок пока нет
- Fault-Tolerant Temperature Control Algorithm For IoT Networks in Smart BuildingsДокумент17 страницFault-Tolerant Temperature Control Algorithm For IoT Networks in Smart Buildingsnazm basmОценок пока нет
- 5 - Traffic Generation of Iec 61850 Sample ValueДокумент6 страниц5 - Traffic Generation of Iec 61850 Sample Valuerodrigocomunian1Оценок пока нет
- Foukalas19dependability PDFДокумент10 страницFoukalas19dependability PDFhelsinkiboyОценок пока нет
- Energies: A Comprehensive Review On Iot Protocols' Features in Smart Grid CommunicationДокумент24 страницыEnergies: A Comprehensive Review On Iot Protocols' Features in Smart Grid CommunicationCORAL ALONSO JIMÉNEZОценок пока нет
- Sensors: A Smart City Lighting Case Study On An Openstack-Powered InfrastructureДокумент22 страницыSensors: A Smart City Lighting Case Study On An Openstack-Powered InfrastructureShubham MorajkarОценок пока нет
- Politecnico Di Torino Repository ISTITUZIONALEДокумент7 страницPolitecnico Di Torino Repository ISTITUZIONALEMiguelChoqueLandivarОценок пока нет
- Adc PaperДокумент34 страницыAdc Papersharmasiddhant2063Оценок пока нет
- BeeGOns A Wireless Sensor Node For Fog Computing in Smart City ApplicationsДокумент5 страницBeeGOns A Wireless Sensor Node For Fog Computing in Smart City Applicationsdominic savioОценок пока нет
- 1 s2.0 S0926580522004927 MainДокумент11 страниц1 s2.0 S0926580522004927 MainAqeel AnwarОценок пока нет
- EMS An Energy Management Scheme ForДокумент16 страницEMS An Energy Management Scheme Forsolange2000Оценок пока нет
- Iot Platform For Smart Cities: Requirements and Implementation Case StudiesДокумент8 страницIot Platform For Smart Cities: Requirements and Implementation Case StudiesShubham MorajkarОценок пока нет
- Computers: The Emergence of Internet of Things (Iot) : Connecting Anything, AnywhereДокумент4 страницыComputers: The Emergence of Internet of Things (Iot) : Connecting Anything, AnywhereBRAYAN STEAD RODRIGUEZ CRUZОценок пока нет
- Cyber Security and Power System Communication-EsseДокумент8 страницCyber Security and Power System Communication-EsseShakeelAhmedОценок пока нет
- A Survey On Smart Cities' IoTДокумент10 страницA Survey On Smart Cities' IoTLe Phu Cuong B1907219Оценок пока нет
- From Physical To Virtual Wireless Sensor Networks Using Cloud ComputingДокумент7 страницFrom Physical To Virtual Wireless Sensor Networks Using Cloud ComputingWhite Globe Publications (IJORCS)Оценок пока нет
- Enabling Emulation and Evaluation of IEC 61850 Networks With TITANДокумент18 страницEnabling Emulation and Evaluation of IEC 61850 Networks With TITANEdward EdwardОценок пока нет
- Modelling An Energy-Efficient Zigbee (Ieee 802.15.4) Body Area Network in Iot-Based Smart HomesДокумент5 страницModelling An Energy-Efficient Zigbee (Ieee 802.15.4) Body Area Network in Iot-Based Smart HomesCindy CynthiaОценок пока нет
- Analysis of IEC 61850-9-2LE Measured Values Using A Neural NetworkДокумент20 страницAnalysis of IEC 61850-9-2LE Measured Values Using A Neural NetworkreynaldorxОценок пока нет
- Healthcare Iot M-Greencardio Remote Cardiac Monitoring System - Concept, Theory of Operation and ImplementationДокумент8 страницHealthcare Iot M-Greencardio Remote Cardiac Monitoring System - Concept, Theory of Operation and ImplementationUriHaimОценок пока нет
- Global Transitions Proceedings: Loveleen Kaur, Rajbir KaurДокумент10 страницGlobal Transitions Proceedings: Loveleen Kaur, Rajbir KaurTomas JosephОценок пока нет
- Energies 15 00924 - 5Документ12 страницEnergies 15 00924 - 5omar ahmedОценок пока нет
- Preface 2016 Internet of ThingsДокумент2 страницыPreface 2016 Internet of ThingsSeac IngenieríaОценок пока нет
- IOT NotesДокумент12 страницIOT NotesMalay NiravОценок пока нет
- 1 - en - 11 - Chapter 118..132Документ15 страниц1 - en - 11 - Chapter 118..132Huong LeОценок пока нет
- Conference PaperДокумент10 страницConference PaperJ.MARIETTA JOHNSONОценок пока нет
- Distributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControlДокумент10 страницDistributed Large-Scale Co-Simulation For Iot-Aided Smart Grid ControldikyОценок пока нет
- A Semantic Theory of The Internet of ThingsДокумент30 страницA Semantic Theory of The Internet of ThingsNelsioОценок пока нет
- Sensors 19 04567 PDFДокумент18 страницSensors 19 04567 PDFCrazy MeОценок пока нет
- Analysis of Throughput Performance StatisticsДокумент5 страницAnalysis of Throughput Performance StatisticsData BaseОценок пока нет
- I Fog SimДокумент22 страницыI Fog Simibrahim1Оценок пока нет
- Integration of Distributed Energy Resources in The Grid by Applying International Standards To The Inverter As A Multifunctional Grid InterfaceДокумент8 страницIntegration of Distributed Energy Resources in The Grid by Applying International Standards To The Inverter As A Multifunctional Grid InterfaceSebastian BernalОценок пока нет
- Iot-Based Monitoring and Management Power Sub-Station of The University of MosulДокумент14 страницIot-Based Monitoring and Management Power Sub-Station of The University of MosulArun B ThahaОценок пока нет
- Energies: Overview of Real-Time Simulation As A Supporting Effort To Smart-Grid AttainmentДокумент24 страницыEnergies: Overview of Real-Time Simulation As A Supporting Effort To Smart-Grid AttainmentHoàng Tuấn LinhОценок пока нет
- Cheddadi2020 Article DesignAndImplementationOfAnIntДокумент11 страницCheddadi2020 Article DesignAndImplementationOfAnIntBogdan raduОценок пока нет
- Experimental Characterization of Mobile Iot Application LatencyДокумент13 страницExperimental Characterization of Mobile Iot Application LatencyakttripathiОценок пока нет
- Trust Based Scheme For Iot Enabled Wireless Sensor NetworksДокумент20 страницTrust Based Scheme For Iot Enabled Wireless Sensor NetworksS G ShivaPrasad YadavОценок пока нет
- Ijres-V18p103 5Документ10 страницIjres-V18p103 5Usha ParmarОценок пока нет
- Ubiquitous Monitoring For Industrial Cyber-Physical Systems Over Relay-Assisted Wireless Sensor NetworksДокумент11 страницUbiquitous Monitoring For Industrial Cyber-Physical Systems Over Relay-Assisted Wireless Sensor NetworksBiplabОценок пока нет
- Journal Pre-Proof: Microprocessors and MicrosystemsДокумент29 страницJournal Pre-Proof: Microprocessors and Microsystemsshanmuga prakashОценок пока нет
- QWQWQWQWQ WQWQWQWQW QWQWQWQWQ WqofficeДокумент38 страницQWQWQWQWQ WQWQWQWQW QWQWQWQWQ WqofficeNaren BalaОценок пока нет
- Who Contribute Quality Content To TheДокумент20 страницWho Contribute Quality Content To TheNaren BalaОценок пока нет
- Afsd FDSFSDSDLДокумент3 страницыAfsd FDSFSDSDLNaren BalaОценок пока нет
- Oiuyuyuyuoui JLKJXKJZKXJKZJДокумент21 страницаOiuyuyuyuoui JLKJXKJZKXJKZJNaren BalaОценок пока нет
- LOGIN Through The Management Port. (The DSLAM Has Been Configured Bydefault From Factory With Management Ip: 192.168.1.2. So You Need Not UseДокумент15 страницLOGIN Through The Management Port. (The DSLAM Has Been Configured Bydefault From Factory With Management Ip: 192.168.1.2. So You Need Not UseNaren BalaОценок пока нет
- Information For Authors: Anuscript UbmissionДокумент1 страницаInformation For Authors: Anuscript UbmissionNaren BalaОценок пока нет
- Hardwa RE Interefa CES: Hardware Interfaces Exist in Many of The Components Such AsДокумент4 страницыHardwa RE Interefa CES: Hardware Interfaces Exist in Many of The Components Such AsNaren BalaОценок пока нет
- Ring A Ring RosesДокумент2 страницыRing A Ring RosesNaren BalaОценок пока нет
- TE 5170 Manual PDFДокумент40 страницTE 5170 Manual PDFJairo Giovanny HernándezОценок пока нет
- CodeBlocks-Arduino Addons To Code Blocks To Support Arduinos and ATtinysДокумент5 страницCodeBlocks-Arduino Addons To Code Blocks To Support Arduinos and ATtinysBobbyОценок пока нет
- The Olympic Stadium in Munich, GermanyДокумент13 страницThe Olympic Stadium in Munich, GermanykmarshalОценок пока нет
- Qdoc - Tips Dse Ingepac Ef LD Eng (35page)Документ35 страницQdoc - Tips Dse Ingepac Ef LD Eng (35page)Udomsak ThanatkhaОценок пока нет
- FFUS2613LS4 Frigidaire Refrigerator Wiring 240389639Документ2 страницыFFUS2613LS4 Frigidaire Refrigerator Wiring 240389639aderloch100% (1)
- DESIGN OF BEAM Bending Moment On A Beam Basic FormulaeДокумент4 страницыDESIGN OF BEAM Bending Moment On A Beam Basic FormulaeGeorge KaraspОценок пока нет
- Metric Conversions and PracticeДокумент5 страницMetric Conversions and PracticekwilsonОценок пока нет
- AZEOTROPIC DATA (Advances in Chemistry Volume 6) PDFДокумент331 страницаAZEOTROPIC DATA (Advances in Chemistry Volume 6) PDFSachikanta PradhanОценок пока нет
- TL 202Документ11 страницTL 202Eduardo Jose Fernandez PedrozaОценок пока нет
- Research DesignsДокумент18 страницResearch DesignsSergioОценок пока нет
- Tomar - Industrial Signalling CatalogДокумент82 страницыTomar - Industrial Signalling CatalogPrejit RadhakrishnaОценок пока нет
- AS #3 Earth and LifeДокумент12 страницAS #3 Earth and LifeJohndale Delos Reyes SolarОценок пока нет
- Chemistry Textbook 10 - 12 PDFДокумент86 страницChemistry Textbook 10 - 12 PDFMusanta Simmon SimzОценок пока нет
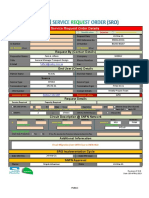
- Service Request Order DetailsДокумент4 страницыService Request Order DetailsKashif NaeemОценок пока нет
- Adjustment Computation Notes by UotilaДокумент59 страницAdjustment Computation Notes by Uotilatangdc99Оценок пока нет
- Types Roof Trusses: Building Technology 3 2012Документ34 страницыTypes Roof Trusses: Building Technology 3 2012Arnav DasaurОценок пока нет
- 6 MindmapДокумент1 страница6 MindmapHILMAN NAZRIОценок пока нет
- No Fines ConcreteДокумент5 страницNo Fines ConcretedannyОценок пока нет
- The Mostly Complete Chart of Neural NetworksДокумент19 страницThe Mostly Complete Chart of Neural NetworksCarlos Villamizar100% (1)
- Kleyn Successful (2012) G1 MaterialДокумент9 страницKleyn Successful (2012) G1 MaterialcarlmarxОценок пока нет
- Laboratory Experiments - PhysicsДокумент36 страницLaboratory Experiments - PhysicsMayank AgarwalОценок пока нет
- Samsung Digital Video Camcorder SC-MX20 Series (Chassis MX20) Parts and Service ManualДокумент98 страницSamsung Digital Video Camcorder SC-MX20 Series (Chassis MX20) Parts and Service ManualricwerОценок пока нет
- Ficha Tecnica Aquarius VeterinaryДокумент1 страницаFicha Tecnica Aquarius Veterinarydiana ruizОценок пока нет
- NCS - DIY For E63 - E64Документ13 страницNCS - DIY For E63 - E64Larken BradynОценок пока нет
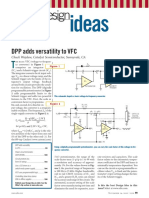
- VFC PDFДокумент7 страницVFC PDFtommy99Оценок пока нет
- In Uence Des Milieux de Conservation Sur Les Propriétés Physico-Mécaniques de Béton de Sable de DunesДокумент9 страницIn Uence Des Milieux de Conservation Sur Les Propriétés Physico-Mécaniques de Béton de Sable de DunesAbderraouf KamelОценок пока нет
- 9-Biomechanics of Articular Cartilage Part 3Документ30 страниц9-Biomechanics of Articular Cartilage Part 3LibbyОценок пока нет
- PS4 FonteДокумент53 страницыPS4 FonteEdson HenriqueОценок пока нет
- Experiment No 2Документ11 страницExperiment No 2Nicole De Leon MidayОценок пока нет
- Raspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)Документ27 страницRaspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)orangota100% (1)