Вам также может понравиться
- Class 9th - Kinematics PDFДокумент1 страницаClass 9th - Kinematics PDFaakashОценок пока нет
- Class 9th - Kinematics PDFДокумент1 страницаClass 9th - Kinematics PDFaakashОценок пока нет
- Horowitz and Sahani Fundamentals of Computer Algorithms 2nd Edition PDFДокумент777 страницHorowitz and Sahani Fundamentals of Computer Algorithms 2nd Edition PDFaakash100% (1)
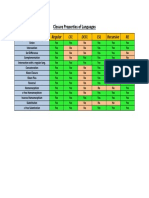
- Closure Properties Table PDFДокумент1 страницаClosure Properties Table PDFaakashОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Python Workshop ExercisesДокумент7 страницPython Workshop ExercisesMegaVОценок пока нет
- ANSYS TurboGrid Users GuideДокумент144 страницыANSYS TurboGrid Users GuideAndrés Edisson ÁguilaОценок пока нет
- SYMBOL Characters and GlyphsДокумент8 страницSYMBOL Characters and GlyphssabitavabiОценок пока нет
- FURTHER MATHEMATICS LOWER SIXTH RealДокумент3 страницыFURTHER MATHEMATICS LOWER SIXTH RealAlphonsius WongОценок пока нет
- 2023-24 - Work Shop Topics (Sub Topics) Allotments - VSP-Raghu SirДокумент23 страницы2023-24 - Work Shop Topics (Sub Topics) Allotments - VSP-Raghu SirGowri ShankarОценок пока нет
- Design of Fluid Thermal Systems: William S. Janna 9781285859651 Fourth Edition Errata For First PrintingДокумент1 страницаDesign of Fluid Thermal Systems: William S. Janna 9781285859651 Fourth Edition Errata For First PrintingAhsan Habib Tanim0% (1)
- 2.1 Random Variables 2.1.1 Definition: PX PX XДокумент13 страниц2.1 Random Variables 2.1.1 Definition: PX PX XMichael Hsiao100% (1)
- C++ SPL Paper On Copy ConstructorsДокумент2 страницыC++ SPL Paper On Copy ConstructorsSanjay MunjalОценок пока нет
- Punctuations: Symbols Uses ExamplesДокумент3 страницыPunctuations: Symbols Uses ExamplesMari Carmen Pérez GómezОценок пока нет
- Step-By-step Creation of A BAPI in Detailed StepsДокумент27 страницStep-By-step Creation of A BAPI in Detailed Stepsapi-3731371100% (1)
- Phil 26 Perpetual Motion MachinesДокумент21 страницаPhil 26 Perpetual Motion MachinesMos CraciunОценок пока нет
- Tesis Aan Putra, M.pd.Документ338 страницTesis Aan Putra, M.pd.Rizki KurniashihОценок пока нет
- Chapter 10 Stock Valuation A Second LookДокумент33 страницыChapter 10 Stock Valuation A Second LookshuОценок пока нет
- Lecture11 PDFДокумент22 страницыLecture11 PDFVrundОценок пока нет
- M&M Analysis KC SharedДокумент103 страницыM&M Analysis KC SharedDebanjan MukherjeeОценок пока нет
- Other Immediate InferenceДокумент14 страницOther Immediate Inferencehimanshulohar79Оценок пока нет
- R16 Pce JntukДокумент189 страницR16 Pce JntukVamsi KrishnaОценок пока нет
- 4-Bit AluДокумент45 страниц4-Bit AluAllam Rajkumar0% (1)
- Hemadri 2018 2Документ11 страницHemadri 2018 2Vadiraj HemadriОценок пока нет
- Vedic Maths-Teacher - Presentation 2020 PDFДокумент26 страницVedic Maths-Teacher - Presentation 2020 PDFNabeel HashimОценок пока нет
- EEPaper IДокумент145 страницEEPaper IkusumaОценок пока нет
- Investigation of Interparticle Breakage As Applied To Cone Crushing PDFДокумент16 страницInvestigation of Interparticle Breakage As Applied To Cone Crushing PDFFrancisco Antonio Guerrero MonsalvesОценок пока нет
- Ken Black QA 5th Chapter16 SolutionДокумент16 страницKen Black QA 5th Chapter16 SolutionRushabh Vora0% (1)
- Space and TimeДокумент36 страницSpace and TimeravindraОценок пока нет
- Lab 6 DFT and FFTДокумент16 страницLab 6 DFT and FFTZia UllahОценок пока нет
- Chapter 2 - DataДокумент10 страницChapter 2 - DataDR NORHISAM BULOTОценок пока нет
- Cambridge IGCSE: MATHEMATICS 0580/33Документ20 страницCambridge IGCSE: MATHEMATICS 0580/33Hussain JassimОценок пока нет
- BEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Документ48 страницBEARD, R. Quadrotor Dynamics and Control. Brigham Young University, 2008 - Rev 0.1Wanderson TeotonioОценок пока нет
- Six Sigma Vs TaguchiДокумент14 страницSix Sigma Vs TaguchiemykosmОценок пока нет
- Problems On SRSS MethodДокумент4 страницыProblems On SRSS MethodSADAIF ANDRABIОценок пока нет