Вам также может понравиться
- Microzed V33a PDFДокумент41 страницаMicrozed V33a PDFJouny WaelОценок пока нет
- Automatic Real Time Auditorium Power Supply Control Using Image ProcessingДокумент6 страницAutomatic Real Time Auditorium Power Supply Control Using Image ProcessingidescitationОценок пока нет
- Ecen 248 Lab 4 ReportДокумент5 страницEcen 248 Lab 4 Reportapi-241454978100% (1)
- Base Plate Design - HiltiДокумент38 страницBase Plate Design - HiltiVictor IkeОценок пока нет
- A Software Video Stabilization System For Automotive Oriented ApplicationsДокумент6 страницA Software Video Stabilization System For Automotive Oriented Applicationspavan kumar sharmaОценок пока нет
- Control System Design AstromДокумент42 страницыControl System Design AstromademargcjuniorОценок пока нет
- Strategies For High Quality Low Cost Optical Sensors - Automotive v7Документ11 страницStrategies For High Quality Low Cost Optical Sensors - Automotive v7Poovannan PrakashОценок пока нет
- Assessment Task 3 - Data Processing: JEE309 - S EДокумент5 страницAssessment Task 3 - Data Processing: JEE309 - S EGenevieveBeckОценок пока нет
- Embedded Software For Pedestrian Detection Using The Raspberry PiДокумент32 страницыEmbedded Software For Pedestrian Detection Using The Raspberry PiCường HuỳnhОценок пока нет
- An Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringДокумент10 страницAn Image-Based Approach To Video Copy Detection With Spatio-Temporal Post-FilteringAchuth VishnuОценок пока нет
- A Characteristics-Based Bandwidth Reduction Technique For Pre-Recorded VideosДокумент4 страницыA Characteristics-Based Bandwidth Reduction Technique For Pre-Recorded Videosalokcena007Оценок пока нет
- Image Processing Safety Assessment Ferrer2013Документ6 страницImage Processing Safety Assessment Ferrer2013Utsa RashiqueОценок пока нет
- Car Ramp LessonsДокумент19 страницCar Ramp LessonsDiane Luz HerreraОценок пока нет
- Scott 2009 KalmanДокумент8 страницScott 2009 Kalmanuname0708Оценок пока нет
- Sample Proposal #2Документ13 страницSample Proposal #2AlexОценок пока нет
- Argus - AbstractДокумент3 страницыArgus - AbstractmurtuzaotherОценок пока нет
- Real-Time Stereo Vision For Urban Traffic Scene UnderstandingДокумент6 страницReal-Time Stereo Vision For Urban Traffic Scene UnderstandingBasilОценок пока нет
- Integrated High Speed Video Becomes Mainstream For Automotive Test ApplicationsДокумент5 страницIntegrated High Speed Video Becomes Mainstream For Automotive Test Applicationsmechanical-enggОценок пока нет
- Non-Metric Camera Calibration and Documentation of Historical BuildingsДокумент6 страницNon-Metric Camera Calibration and Documentation of Historical BuildingssaifОценок пока нет
- Artoolkit 3Документ7 страницArtoolkit 3KARTHI46Оценок пока нет
- Image Processing To Automate Condition Assessment of Overhead Line ComponentsДокумент6 страницImage Processing To Automate Condition Assessment of Overhead Line Componentswai_li_8Оценок пока нет
- SD - 3 - 20e Throughput For MTДокумент11 страницSD - 3 - 20e Throughput For MTTejo RukmonoОценок пока нет
- 258 Finding Mean Traffic Speed in Low FrameRate VideoДокумент17 страниц258 Finding Mean Traffic Speed in Low FrameRate VideoKakarlamudi PramodОценок пока нет
- Identification and Rejection of Defective Ceramic Tile Using Image Processing and ARDUINOДокумент4 страницыIdentification and Rejection of Defective Ceramic Tile Using Image Processing and ARDUINOIJMTST-Online JournalОценок пока нет
- Running Scan On 3 PinsДокумент10 страницRunning Scan On 3 Pinsnithyanandham8494Оценок пока нет
- Team NotesДокумент8 страницTeam NotesMark ParvezОценок пока нет
- UMASISДокумент9 страницUMASISFroylán Ernesto Pompa GarcíaОценок пока нет
- Review 3 ReportДокумент17 страницReview 3 ReportSadanala KarthikОценок пока нет
- Payeurl,: Beriault'Документ6 страницPayeurl,: Beriault'infodotzОценок пока нет
- Vehicle License Plate Segmentation in Natural ImagesДокумент8 страницVehicle License Plate Segmentation in Natural Imagesapi-26400509Оценок пока нет
- Digital Radiography PaperДокумент5 страницDigital Radiography PaperJoe Clarke100% (1)
- Pavement Crack Detection Method of Street View Images Based On Deep LearningДокумент7 страницPavement Crack Detection Method of Street View Images Based On Deep LearningzaidalkabiОценок пока нет
- CommaldsДокумент8 страницCommaldsFred LamertОценок пока нет
- At-Speed Testing Made EasyДокумент7 страницAt-Speed Testing Made Easymsk123123Оценок пока нет
- Underground Cable Report NewДокумент30 страницUnderground Cable Report Newakash_shah111990100% (1)
- Topic: Intelligent Traffic Light Controller: School of Engineering &technology BML Munjal University April 2020Документ12 страницTopic: Intelligent Traffic Light Controller: School of Engineering &technology BML Munjal University April 2020Vidya MathurОценок пока нет
- Research Proposal 3-1. Title of The Research ProposalДокумент4 страницыResearch Proposal 3-1. Title of The Research ProposalImran WarisОценок пока нет
- A Review Enhancement of Degraded VideoДокумент4 страницыA Review Enhancement of Degraded VideoEditor IJRITCCОценок пока нет
- University of Ottawa: Project ReportДокумент16 страницUniversity of Ottawa: Project ReportabimalainОценок пока нет
- VLSI Course ModuleДокумент23 страницыVLSI Course ModuleYermakov Vadim IvanovichОценок пока нет
- Roadside Video Data Analysis FrameworkДокумент28 страницRoadside Video Data Analysis FrameworkKalirajan KОценок пока нет
- Rotoscoping Appearance ModelsДокумент9 страницRotoscoping Appearance ModelsNeerajОценок пока нет
- Solar LiftДокумент5 страницSolar LiftEmily NiОценок пока нет
- NVH Modeling Technique For Automotive Sound Packages: Peoples Republic of ChinaДокумент5 страницNVH Modeling Technique For Automotive Sound Packages: Peoples Republic of Chinaanacarol09Оценок пока нет
- A New Testing Paradigm For Today's Product Development Process - Part 2Документ5 страницA New Testing Paradigm For Today's Product Development Process - Part 2uamiranda3518Оценок пока нет
- Vehicle Tire (Tyre) Detection and Text Recognition Using Deep LearningДокумент6 страницVehicle Tire (Tyre) Detection and Text Recognition Using Deep LearningSolhost NiceОценок пока нет
- Naecon 2018 8556809Документ6 страницNaecon 2018 8556809Anish ShahОценок пока нет
- ME490 Feasibility Study Final VersionДокумент11 страницME490 Feasibility Study Final VersionMichael John VargaОценок пока нет
- Extraction of License-Plate Number of Over Speeding VehiclesДокумент6 страницExtraction of License-Plate Number of Over Speeding VehicleslambanaveenОценок пока нет
- CDNLive2012 - A Comprehensive Approach To Scalable Framework For Both Vertical and Horizontal Reuse in UVM Verification - AMDДокумент10 страницCDNLive2012 - A Comprehensive Approach To Scalable Framework For Both Vertical and Horizontal Reuse in UVM Verification - AMDSamОценок пока нет
- Ece Thesis SampleДокумент8 страницEce Thesis Samplealiciabrooksbeaumont100% (2)
- Ipsotek VIE2008CameraReadyДокумент7 страницIpsotek VIE2008CameraReadyingjojedaОценок пока нет
- A New Path-Oriented Effect-Cause Methodology Diagnose Delay FailuresДокумент10 страницA New Path-Oriented Effect-Cause Methodology Diagnose Delay FailuresFemin VargheseОценок пока нет
- Close-Range Photogrammetry For Accident Reconstruction: July 2005Документ10 страницClose-Range Photogrammetry For Accident Reconstruction: July 2005MMillsОценок пока нет
- Probability-Based Robot Search PathsДокумент13 страницProbability-Based Robot Search Pathsakshay dholeОценок пока нет
- DVR Based ThesisДокумент5 страницDVR Based Thesistinajordanhuntsville100% (1)
- Motion Detection Application Using Web CameraДокумент3 страницыMotion Detection Application Using Web CameraIlham ClinkersОценок пока нет
- Avaya VoIP Network AssessmentДокумент16 страницAvaya VoIP Network AssessmentbartophОценок пока нет
- Pace Perception by Employing Open CVДокумент6 страницPace Perception by Employing Open CVIJRASETPublicationsОценок пока нет
- Blind License Plate Detection: Max Guise Stephan GoupilleДокумент4 страницыBlind License Plate Detection: Max Guise Stephan GoupilleAnwar ZahroniОценок пока нет
- Automotive E-Coat Paint Process Simulation Using FEAДокумент20 страницAutomotive E-Coat Paint Process Simulation Using FEAflowh_100% (1)
- Marquis Specification Sheet 01Документ6 страницMarquis Specification Sheet 01Victor IkeОценок пока нет
- Const 63Документ238 страницConst 63Victor IkeОценок пока нет
- Fd308-m Load Table PDFДокумент1 страницаFd308-m Load Table PDFVictor IkeОценок пока нет
- DIRC Working Paper 3 - Version 1.0Документ38 страницDIRC Working Paper 3 - Version 1.0Victor IkeОценок пока нет
- Part 17 - Complete Documents ListДокумент12 страницPart 17 - Complete Documents ListVictor IkeОценок пока нет
- Stdprod 069405Документ184 страницыStdprod 069405Victor IkeОценок пока нет
- H06263 Chap 07 PDFДокумент34 страницыH06263 Chap 07 PDFVictor IkeОценок пока нет
- Structural Engineer IVДокумент1 страницаStructural Engineer IVVictor IkeОценок пока нет
- Lass Stimate: J S B R /R V, BCДокумент17 страницLass Stimate: J S B R /R V, BCVictor IkeОценок пока нет
- 2001 ReportДокумент2 страницы2001 ReportVictor IkeОценок пока нет
- YYZ Structural EngineeringДокумент2 страницыYYZ Structural EngineeringVictor IkeОценок пока нет
- CPE Member Guideline 2013Документ12 страницCPE Member Guideline 2013Victor IkeОценок пока нет
- Good Character GuidelineДокумент1 страницаGood Character GuidelineVictor IkeОценок пока нет
- September 2014 Course Outline: E5-1 Seismic Design of Concrete StructuresДокумент1 страницаSeptember 2014 Course Outline: E5-1 Seismic Design of Concrete StructuresVictor IkeОценок пока нет
- Mmis-8dumul R2 enДокумент14 страницMmis-8dumul R2 enAngelo RiveraОценок пока нет
- DVR5104EДокумент4 страницыDVR5104ETTB VisionОценок пока нет
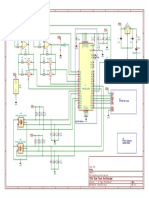
- Title: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenДокумент1 страницаTitle: Dual Trace Oscilloscope: U5 ST7735s TFT ScreenAbdelkader Mechernene100% (2)
- Buck Converter Efficiency App-EДокумент16 страницBuck Converter Efficiency App-EmehdiОценок пока нет
- User's Guide: Smartpack2 Basic ControllerДокумент16 страницUser's Guide: Smartpack2 Basic ControllerIsac ClaroОценок пока нет
- AHB SlaveДокумент18 страницAHB SlaveRam VutaОценок пока нет
- Cisco Netacad Chapter 5Документ59 страницCisco Netacad Chapter 5Carlos IzaОценок пока нет
- 09 Nov 2017 Catálogos Atlas CopcoДокумент52 страницы09 Nov 2017 Catálogos Atlas CopcoAlvaro RJОценок пока нет
- RSA306B USB Real Time Spectrum Analyzer Datasheet 37W603759Документ26 страницRSA306B USB Real Time Spectrum Analyzer Datasheet 37W603759HafiziAhmadОценок пока нет
- Impact of PV On Negative Sequence Based MethodДокумент10 страницImpact of PV On Negative Sequence Based MethodSubhadeep PaladhiОценок пока нет
- Pico Guard PDFДокумент44 страницыPico Guard PDFgmdeucsОценок пока нет
- 3GPP TR 29.998-05-1: Technical ReportДокумент25 страниц3GPP TR 29.998-05-1: Technical Reportdzo007Оценок пока нет
- CTC810 WuxiYoudaelectronicsДокумент4 страницыCTC810 WuxiYoudaelectronicsAnilkannan A PОценок пока нет
- Tech. (sEM" SEM.) Examination,: TLL) IlДокумент4 страницыTech. (sEM" SEM.) Examination,: TLL) IlAbhimanyu YadavОценок пока нет
- G6 Electricity and Magnetism - Revision Booklet and ANSДокумент21 страницаG6 Electricity and Magnetism - Revision Booklet and ANSAhad AliОценок пока нет
- Instrumentation (Chapter 2)Документ7 страницInstrumentation (Chapter 2)Yab TadОценок пока нет
- Xilinx System Generator-Based Rapid Prototyping of Solid-State Transformer For On-Grid Renewable Energy IntegrationДокумент9 страницXilinx System Generator-Based Rapid Prototyping of Solid-State Transformer For On-Grid Renewable Energy Integrationusher jamesОценок пока нет
- Datasheet PDFДокумент10 страницDatasheet PDFRi Cha RdОценок пока нет
- Transducers - 2.1 Sensors and Actuators - IOT2x Courseware - EdXДокумент4 страницыTransducers - 2.1 Sensors and Actuators - IOT2x Courseware - EdXzaheeruddin_mohdОценок пока нет
- Siemens Se 55a590-45 Sgs57m12ff17 Reparation-ManualДокумент67 страницSiemens Se 55a590-45 Sgs57m12ff17 Reparation-ManualD²EMОценок пока нет
- Evaluating Generator Circuit Breakers Short-Circuit Duty Using IEEE C37.010 and C37.013Документ7 страницEvaluating Generator Circuit Breakers Short-Circuit Duty Using IEEE C37.010 and C37.013lacan021100% (1)
- Basic Layout of OLTДокумент3 страницыBasic Layout of OLTgulasbotОценок пока нет
- PIN120 (English Manual)Документ12 страницPIN120 (English Manual)aldokecoОценок пока нет
- 11B2 14 NF Smart Entry and Start System VNДокумент41 страница11B2 14 NF Smart Entry and Start System VNMinh Nhat Phan100% (3)
- Powerware 9 Prestige UPS: Power Management Software Technical SpecificationsДокумент6 страницPowerware 9 Prestige UPS: Power Management Software Technical Specificationsandy175Оценок пока нет
- 01B-ElectSchematics Feb2015Документ19 страниц01B-ElectSchematics Feb2015Alive100% (2)
- 171001Документ2 страницы171001vishalsanziraОценок пока нет
- Ma1 PDFДокумент316 страницMa1 PDFRMK BrothersОценок пока нет