Вам также может понравиться
- Face Recognition Using PCA and SVMДокумент5 страницFace Recognition Using PCA and SVMNhat TrinhОценок пока нет
- Towards A Robust Face Recognition System Using Compressive SensingДокумент4 страницыTowards A Robust Face Recognition System Using Compressive SensinghphuongОценок пока нет
- Eigenfaces and Fisherfaces: Naotoshi SeoДокумент5 страницEigenfaces and Fisherfaces: Naotoshi SeoOsmanОценок пока нет
- 2008-Kukenys+Mccane-svms For Human Face DetectionДокумент4 страницы2008-Kukenys+Mccane-svms For Human Face Detectionkhoaa7Оценок пока нет
- Discriminative K-SVD For Dictionary Learning in Face RecognitionДокумент8 страницDiscriminative K-SVD For Dictionary Learning in Face RecognitionSatish NaiduОценок пока нет
- Vishal M. Patel, Tao Wu, Soma Biswas, P. Jonathon Phillips and Rama ChellappaДокумент4 страницыVishal M. Patel, Tao Wu, Soma Biswas, P. Jonathon Phillips and Rama ChellappaSatish NaiduОценок пока нет
- Two-Dimensional Laplacianfaces Method For Face RecognitionДокумент7 страницTwo-Dimensional Laplacianfaces Method For Face RecognitionKeerti Kumar KorlapatiОценок пока нет
- One Millisecond Face Alignment With An Ensemble of Regression TreesДокумент8 страницOne Millisecond Face Alignment With An Ensemble of Regression TreesJeffersonОценок пока нет
- Sparse Concept Coding For Visual AnalysisДокумент6 страницSparse Concept Coding For Visual AnalysisgalaxystarОценок пока нет
- Face Recognition Based On SVM and 2DPCAДокумент10 страницFace Recognition Based On SVM and 2DPCAbmwliОценок пока нет
- Image Deblurring and Super-Resolution by Adaptive Sparse Domain Selection and Adaptive RegularizationДокумент35 страницImage Deblurring and Super-Resolution by Adaptive Sparse Domain Selection and Adaptive RegularizationSiddhesh PawarОценок пока нет
- A New Face Recognition Method Using PCA, LDA and Neural NetworkДокумент6 страницA New Face Recognition Method Using PCA, LDA and Neural NetworkSujith KumarОценок пока нет
- Kazemi One Millisecond Face 2014 CVPR PaperДокумент8 страницKazemi One Millisecond Face 2014 CVPR PaperRomil ShahОценок пока нет
- ISKE2007 Wu HongliangДокумент7 страницISKE2007 Wu HongliangaaayoubОценок пока нет
- Face Recognition Using EigenfacesДокумент5 страницFace Recognition Using EigenfacesabhitesОценок пока нет
- From Image Vector To MatrixДокумент3 страницыFrom Image Vector To MatrixPushpaSrinivasanОценок пока нет
- Face RecognitionДокумент8 страницFace RecognitionDivya VarshaaОценок пока нет
- Mirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationДокумент9 страницMirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationfurbyhaterОценок пока нет
- A New Face Recognition Method Based On SVD Perturbation For Single Example Image Per PersonДокумент18 страницA New Face Recognition Method Based On SVD Perturbation For Single Example Image Per Personjuan.vesaОценок пока нет
- 1 The Architecture of The Face and Eyes Detection System Based On Cascade ClassifiersДокумент8 страниц1 The Architecture of The Face and Eyes Detection System Based On Cascade ClassifiersNguyễn Duy QuangОценок пока нет
- Face Feature Extraction For Recognition Using Radon TransformДокумент6 страницFace Feature Extraction For Recognition Using Radon TransformAJER JOURNALОценок пока нет
- A Scaled Gradient Projection Method For Constrained Image DeblurringДокумент28 страницA Scaled Gradient Projection Method For Constrained Image DeblurringBogdan PopaОценок пока нет
- Face RecognitionДокумент8 страницFace RecognitionDwi RochmaОценок пока нет
- Technique of Face Recognition Based On PCA With Eigen-Face ApproachДокумент12 страницTechnique of Face Recognition Based On PCA With Eigen-Face ApproachsushilkumarОценок пока нет
- Discriminative Learned Dictionaries For Local Image AnalysisДокумент8 страницDiscriminative Learned Dictionaries For Local Image AnalysisSatish NaiduОценок пока нет
- Manisha Satone 2014Документ14 страницManisha Satone 2014Neeraj KannaugiyaОценок пока нет
- Spatial Feat EmbeddingДокумент4 страницыSpatial Feat Embeddingmartin_321Оценок пока нет
- Shao-Han Liu and Jzau-Sheng Lin - A Compensated Fuzzy Hopfield Neural Network For Codebook Design in Vector QuantizationДокумент13 страницShao-Han Liu and Jzau-Sheng Lin - A Compensated Fuzzy Hopfield Neural Network For Codebook Design in Vector QuantizationTuhmaОценок пока нет
- Kernal Methods Machine LearningДокумент53 страницыKernal Methods Machine LearningpalaniОценок пока нет
- Harish SynopsisДокумент12 страницHarish SynopsisAviral MishraОценок пока нет
- Perceptual Adaptive Insensitivity For Support Vector Machine Image CodingДокумент21 страницаPerceptual Adaptive Insensitivity For Support Vector Machine Image Codinganalyst111Оценок пока нет
- Masoud Mazloom Shohreh Kasaei: Face Recognition Using Wavelet, PCA, and Neural NetworksДокумент6 страницMasoud Mazloom Shohreh Kasaei: Face Recognition Using Wavelet, PCA, and Neural NetworkssvijiОценок пока нет
- Artigo SmallexДокумент17 страницArtigo SmallexWill CorleoneОценок пока нет
- Laude 2018 Discrete ContinuousДокумент13 страницLaude 2018 Discrete ContinuousswagmanswagОценок пока нет
- Articol Informatica EconomicaДокумент10 страницArticol Informatica EconomicaralucastefaneauaОценок пока нет
- Ai&ml Module 5 FinalДокумент14 страницAi&ml Module 5 Finalprajna.sg241Оценок пока нет
- Fast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationДокумент22 страницыFast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationShahid KIОценок пока нет
- Design of Radial Basis Function Network As Classifier in Face Recognition Using EigenfacesДокумент6 страницDesign of Radial Basis Function Network As Classifier in Face Recognition Using EigenfacessamimranОценок пока нет
- ICME Deblurring PDFДокумент6 страницICME Deblurring PDFKushagra SinghalОценок пока нет
- An Explanation Method For Siamese Neural NetworksДокумент11 страницAn Explanation Method For Siamese Neural NetworksNguyễn Trường SơnОценок пока нет
- Denoising of Natural Images Based On Compressive Sensing: Chege SimonДокумент16 страницDenoising of Natural Images Based On Compressive Sensing: Chege SimonIAEME PublicationОценок пока нет
- Regularization Networks and Support Vector MachinesДокумент53 страницыRegularization Networks and Support Vector MachinesansmechitОценок пока нет
- CosineSimilarityMetricLearning ACCV10Документ13 страницCosineSimilarityMetricLearning ACCV10iwei2005Оценок пока нет
- LAB MANUAL 2D1427 Image Based RecognitioДокумент25 страницLAB MANUAL 2D1427 Image Based RecognitioLucky SaxenaОценок пока нет
- 9 Unsupervised Learning: 9.1 K-Means ClusteringДокумент34 страницы9 Unsupervised Learning: 9.1 K-Means ClusteringJavier RivasОценок пока нет
- Cloudsvm: Training An SVM Classifier in Cloud Computing SystemsДокумент13 страницCloudsvm: Training An SVM Classifier in Cloud Computing SystemssfarithaОценок пока нет
- Faster Training of Structural Svms With Diverse M-Best Cutting-PlanesДокумент7 страницFaster Training of Structural Svms With Diverse M-Best Cutting-PlanesflotudОценок пока нет
- FaceRecog PCA KimДокумент7 страницFaceRecog PCA KimRajesh VeerabadranОценок пока нет
- 2005 - Designing Multiple Classi Er SystemsДокумент10 страниц2005 - Designing Multiple Classi Er SystemsluongxuandanОценок пока нет
- Ee5551 Newproj ReportДокумент18 страницEe5551 Newproj ReportPoornima BehlОценок пока нет
- BM3D Frames and Variational Image DeblurringДокумент13 страницBM3D Frames and Variational Image DeblurringKhalandar BashaОценок пока нет
- Individual Kernel Tensor-Subspaces For Robust Face RecognitionДокумент5 страницIndividual Kernel Tensor-Subspaces For Robust Face RecognitionsriashokcuteОценок пока нет
- Empirical Analysis of Detection Cascades of Boosted Classifiers For Rapid Object DetectionДокумент8 страницEmpirical Analysis of Detection Cascades of Boosted Classifiers For Rapid Object DetectionMamik CiamikОценок пока нет
- Wavelet Enhanced Appearance Modelling: A B C AДокумент10 страницWavelet Enhanced Appearance Modelling: A B C AMahesh G RajuОценок пока нет
- Deon Garrett Et Al - Comparison of Linear and Nonlinear Methods For EEG Signal ClassificationДокумент7 страницDeon Garrett Et Al - Comparison of Linear and Nonlinear Methods For EEG Signal ClassificationAsvcxvОценок пока нет
- Support Vector MachinesДокумент32 страницыSupport Vector MachinesGeorge PaulОценок пока нет
- Logarithm Discrete Cosine Transform Domain and Discrimination Power Analysis For Illumination Invariant Face RecognitionДокумент7 страницLogarithm Discrete Cosine Transform Domain and Discrimination Power Analysis For Illumination Invariant Face Recognitionpioneerb64Оценок пока нет
- Integer Optimization and its Computation in Emergency ManagementОт EverandInteger Optimization and its Computation in Emergency ManagementОценок пока нет
- Image Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionОт EverandImage Based Modeling and Rendering: Exploring Visual Realism: Techniques in Computer VisionОценок пока нет
- Fast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationДокумент22 страницыFast Low Rank Representation Based Spatial Pyramid Matching For Image ClassificationShahid KIОценок пока нет
- Locally Linear Representation For Image Clustering: Liangli Zhen, Zhang Yi, Xi Peng and Dezhong PengДокумент2 страницыLocally Linear Representation For Image Clustering: Liangli Zhen, Zhang Yi, Xi Peng and Dezhong PengShahid KIОценок пока нет
- CVPR16 Tutorial Subspace Clustering Scalable SSC ReneДокумент34 страницыCVPR16 Tutorial Subspace Clustering Scalable SSC ReneShahid KIОценок пока нет
- Machine LearningДокумент15 страницMachine LearningShahid KIОценок пока нет
- Module 12Документ25 страницModule 12Shahid KIОценок пока нет
- Ee370 Ass2 Matlab CodeДокумент1 страницаEe370 Ass2 Matlab CodeShahid KIОценок пока нет
- EE380 (Control Systems) Lab Work of Experiment 5.: Student Name Roll No. Bench NoДокумент2 страницыEE380 (Control Systems) Lab Work of Experiment 5.: Student Name Roll No. Bench NoShahid KIОценок пока нет
- 8085 InstructionsetДокумент21 страница8085 InstructionsetAmarjeet OberoiОценок пока нет
- Assignment 3Документ2 страницыAssignment 3Shahid KIОценок пока нет
- Adaptive Filter For Ecg Noise Reduction Using Rls Algorithm: Arshdeep Singh, Rajesh MehraДокумент5 страницAdaptive Filter For Ecg Noise Reduction Using Rls Algorithm: Arshdeep Singh, Rajesh MehraShahid KIОценок пока нет
- Lec 3 VerilogДокумент36 страницLec 3 VerilogShahid KIОценок пока нет
- Allamah Nu'Mani and Other Deobandis On Ibn Abd Al-Wahhab and His FollowersДокумент11 страницAllamah Nu'Mani and Other Deobandis On Ibn Abd Al-Wahhab and His FollowersShahid KI100% (1)
- Lec 03Документ19 страницLec 03akashsherОценок пока нет
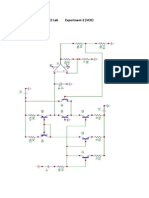
- EE381A: EC Lab Experiment-2 (VCO)Документ2 страницыEE381A: EC Lab Experiment-2 (VCO)Shahid KIОценок пока нет
- EE321 - Assignment I: January 11, 2014Документ1 страницаEE321 - Assignment I: January 11, 2014Shahid KIОценок пока нет
- Ac PDFДокумент1 страницаAc PDFShahid KIОценок пока нет
- Ballbeam EE380 Fall09 PDFДокумент13 страницBallbeam EE380 Fall09 PDFShahid KIОценок пока нет
- HFE0106 TraskPart2Документ5 страницHFE0106 TraskPart2arunkr1Оценок пока нет
- MEd TG G07 EN 04-Oct Digital PDFДокумент94 страницыMEd TG G07 EN 04-Oct Digital PDFMadhan GanesanОценок пока нет
- Organization Culture Impacts On Employee Motivation: A Case Study On An Apparel Company in Sri LankaДокумент4 страницыOrganization Culture Impacts On Employee Motivation: A Case Study On An Apparel Company in Sri LankaSupreet PurohitОценок пока нет
- Maritime Academy of Asia and The Pacific-Kamaya Point Department of AcademicsДокумент7 страницMaritime Academy of Asia and The Pacific-Kamaya Point Department of Academicsaki sintaОценок пока нет
- H13 611 PDFДокумент14 страницH13 611 PDFMonchai PhaichitchanОценок пока нет
- Myanmar 1Документ3 страницыMyanmar 1Shenee Kate BalciaОценок пока нет
- Mechanical Engineering - Workshop Practice - Laboratory ManualДокумент77 страницMechanical Engineering - Workshop Practice - Laboratory Manualrajeevranjan_br100% (4)
- Participants ListДокумент13 страницParticipants Listmailway002Оценок пока нет
- WHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)Документ3 страницыWHO Guidelines For Drinking Water: Parameters Standard Limits As Per WHO Guidelines (MG/L)114912Оценок пока нет
- Shelly e CommerceДокумент13 страницShelly e CommerceVarun_Arya_8382Оценок пока нет
- CiscoДокумент6 страницCiscoNatalia Kogan0% (2)
- BackgroundsДокумент13 страницBackgroundsRaMinah100% (8)
- EGurukul - RetinaДокумент23 страницыEGurukul - RetinaOscar Daniel Mendez100% (1)
- Chemistry Investigatory Project (R)Документ23 страницыChemistry Investigatory Project (R)BhagyashreeОценок пока нет
- Open Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaДокумент3 страницыOpen Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaProf. Prithvi Singh KandhalОценок пока нет
- Pulmonary EmbolismДокумент48 страницPulmonary Embolismganga2424100% (3)
- Convection Transfer EquationsДокумент9 страницConvection Transfer EquationsA.N.M. Mominul Islam MukutОценок пока нет
- Syllabus PDFДокумент3 страницыSyllabus PDFBibin Raj B SОценок пока нет
- Grid Pattern PortraitДокумент8 страницGrid Pattern PortraitEmma FravigarОценок пока нет
- Ilocos Norte Youth Development Office Accomplishment Report 2Документ17 страницIlocos Norte Youth Development Office Accomplishment Report 2Solsona Natl HS MaanantengОценок пока нет
- Logiq v12 SM PDFДокумент267 страницLogiq v12 SM PDFpriyaОценок пока нет
- Fundamentals of Signal and Power Integrity PDFДокумент46 страницFundamentals of Signal and Power Integrity PDFjaltitiОценок пока нет
- Automatic Gearbox ZF 4HP 20Документ40 страницAutomatic Gearbox ZF 4HP 20Damien Jorgensen100% (3)
- Soujanya Reddy (New)Документ6 страницSoujanya Reddy (New)durgaОценок пока нет
- 2016 W-2 Gross Wages CityДокумент16 страниц2016 W-2 Gross Wages CityportsmouthheraldОценок пока нет
- A Review of Service Quality ModelsДокумент8 страницA Review of Service Quality ModelsJimmiJini100% (1)
- EVOM ManualДокумент2 страницыEVOM ManualHouston WhiteОценок пока нет
- Bba VДокумент2 страницыBba VkunalbrabbitОценок пока нет
- 5066452Документ53 страницы5066452jlcheefei9258Оценок пока нет
- ThorpeДокумент267 страницThorpezaeem73Оценок пока нет