Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Project - New Restuarant Management System The Grill HouseДокумент24 страницыProject - New Restuarant Management System The Grill HouseMayank Mahajan100% (3)
- Working With Difficult People Online WorksheetДокумент4 страницыWorking With Difficult People Online WorksheetHugh Fox IIIОценок пока нет
- Theory GraphДокумент23 страницыTheory GraphArthur CarabioОценок пока нет
- Working Capital in YamahaДокумент64 страницыWorking Capital in YamahaRenu Jindal50% (2)
- PMP Question BankДокумент3 страницыPMP Question BankOmerZiaОценок пока нет
- GT-N7100-Full Schematic PDFДокумент67 страницGT-N7100-Full Schematic PDFprncha86% (7)
- Modelling Real-Time OperationДокумент1 страницаModelling Real-Time OperationvstojnicОценок пока нет
- 197104-SNOWY MOUNTAINS MEDIAN ANNUAL RAINFALL - Elevation+runoffДокумент9 страниц197104-SNOWY MOUNTAINS MEDIAN ANNUAL RAINFALL - Elevation+runoffvstojnicОценок пока нет
- Modelling - Planning & ManagementДокумент1 страницаModelling - Planning & ManagementvstojnicОценок пока нет
- Tecjjpiqgy Brogo and Windamere Dams: For TheДокумент1 страницаTecjjpiqgy Brogo and Windamere Dams: For ThevstojnicОценок пока нет
- Apesma NotesДокумент2 страницыApesma NotesvstojnicОценок пока нет
- 2004-2008 - Problem Solving Process ChecklistДокумент1 страница2004-2008 - Problem Solving Process ChecklistvstojnicОценок пока нет
- Sydney Water Asset Protection ReportДокумент4 страницыSydney Water Asset Protection Reportvstojnic0% (1)
- Running Testing and Understanding The Hydrological Simulation Program Fortran HSPF Wang Duru HjelmfeltДокумент36 страницRunning Testing and Understanding The Hydrological Simulation Program Fortran HSPF Wang Duru Hjelmfeltvstojnic100% (1)
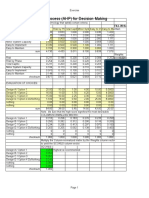
- The Analytic Hierarchy Process (AHP) For Decision Making: Fill-In The Yellow AreasДокумент4 страницыThe Analytic Hierarchy Process (AHP) For Decision Making: Fill-In The Yellow AreasvstojnicОценок пока нет
- Project Management Reference Manual Part 1Документ13 страницProject Management Reference Manual Part 1vstojnicОценок пока нет
- A Generic Method of Design of Osd StoragesДокумент7 страницA Generic Method of Design of Osd StoragesvstojnicОценок пока нет
- Uputstvo Za Koriscenje Programa KanДокумент4 страницыUputstvo Za Koriscenje Programa KanvstojnicОценок пока нет
- Mala Mojstrovka PaintingДокумент1 страницаMala Mojstrovka PaintingvstojnicОценок пока нет
- Pump Control Model FPC 30010Документ4 страницыPump Control Model FPC 30010vstojnicОценок пока нет
- Making Effective Powerpoint Presentations: October 2014Документ18 страницMaking Effective Powerpoint Presentations: October 2014Mariam TchkoidzeОценок пока нет
- Damodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaДокумент25 страницDamodaram Sanjivayya National Law University Visakhapatnam, A.P., IndiaSumanth RoxtaОценок пока нет
- Acute Coronary SyndromeДокумент30 страницAcute Coronary SyndromeEndar EszterОценок пока нет
- MGMT Audit Report WritingДокумент28 страницMGMT Audit Report WritingAndrei IulianОценок пока нет
- The Magic DrumДокумент185 страницThe Magic Drumtanishgiri2012Оценок пока нет
- Lithuania DalinaДокумент16 страницLithuania DalinaStunt BackОценок пока нет
- How Drugs Work - Basic Pharmacology For Healthcare ProfessionalsДокумент19 страницHow Drugs Work - Basic Pharmacology For Healthcare ProfessionalsSebastián Pérez GuerraОценок пока нет
- Famous Russian PianoДокумент10 страницFamous Russian PianoClara-Schumann-198550% (2)
- Carriage RequirementsДокумент63 страницыCarriage RequirementsFred GrosfilerОценок пока нет
- Environmental Economics Pollution Control: Mrinal Kanti DuttaДокумент253 страницыEnvironmental Economics Pollution Control: Mrinal Kanti DuttashubhamОценок пока нет
- Activity # 1 (DRRR)Документ2 страницыActivity # 1 (DRRR)Juliana Xyrelle FutalanОценок пока нет
- Plaza 66 Tower 2 Structural Design ChallengesДокумент13 страницPlaza 66 Tower 2 Structural Design ChallengessrvshОценок пока нет
- PM CH 14Документ24 страницыPM CH 14phani chowdaryОценок пока нет
- Equivalent Fractions Activity PlanДокумент6 страницEquivalent Fractions Activity Planapi-439333272Оценок пока нет
- Deal Report Feb 14 - Apr 14Документ26 страницDeal Report Feb 14 - Apr 14BonviОценок пока нет
- KP Tevta Advertisement 16-09-2019Документ4 страницыKP Tevta Advertisement 16-09-2019Ishaq AminОценок пока нет
- Farmer Producer Companies in OdishaДокумент34 страницыFarmer Producer Companies in OdishaSuraj GantayatОценок пока нет
- Aptitude Number System PDFДокумент5 страницAptitude Number System PDFharieswaranОценок пока нет
- An Exploration of The Ethno-Medicinal Practices Among Traditional Healers in Southwest Cebu, PhilippinesДокумент7 страницAn Exploration of The Ethno-Medicinal Practices Among Traditional Healers in Southwest Cebu, PhilippinesleecubongОценок пока нет
- SSGC-RSGLEG Draft Study On The Applicability of IAL To Cyber Threats Against Civil AviationДокумент41 страницаSSGC-RSGLEG Draft Study On The Applicability of IAL To Cyber Threats Against Civil AviationPrachita AgrawalОценок пока нет
- Broken BondsДокумент20 страницBroken Bondsapi-316744816Оценок пока нет
- Read While Being Blind.. Braille's Alphabet: Be Aware and Active !Документ3 страницыRead While Being Blind.. Braille's Alphabet: Be Aware and Active !bitermanОценок пока нет
- Lecture 4 ENGR 243 DynamicsДокумент45 страницLecture 4 ENGR 243 DynamicsRobby RebolledoОценок пока нет
- Aleksandrov I Dis 1-50.ru - enДокумент50 страницAleksandrov I Dis 1-50.ru - enNabeel AdilОценок пока нет