Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- SWNT Spice ModelДокумент6 страницSWNT Spice Modelpra_zara2637Оценок пока нет
- Hardware Development Tools: 2009 Texas Instruments, All Rights ReservedДокумент38 страницHardware Development Tools: 2009 Texas Instruments, All Rights Reservedpra_zara2637Оценок пока нет
- Introduction To Rate Monotonic SchedulingДокумент4 страницыIntroduction To Rate Monotonic Schedulingpra_zara2637Оценок пока нет
- Frequency Response of CircuitДокумент14 страницFrequency Response of Circuitpra_zara2637100% (1)
- Z-Plane RL Design Using MATLAB: 2.1 PlantДокумент4 страницыZ-Plane RL Design Using MATLAB: 2.1 Plantpra_zara2637Оценок пока нет
- Eleg. 2111 Laboratory 6 "Q" Factor and Transient Response of An RLC Series CircuitДокумент9 страницEleg. 2111 Laboratory 6 "Q" Factor and Transient Response of An RLC Series Circuitpra_zara2637Оценок пока нет
- CMOS Fabrication Technology and Design RulesДокумент17 страницCMOS Fabrication Technology and Design Rulespra_zara2637Оценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Datasheet Joint Isolant 4'' #300 PDFДокумент1 страницаDatasheet Joint Isolant 4'' #300 PDFseifОценок пока нет
- Implifier PanssonicДокумент5 страницImplifier PanssonicSergs LluismaОценок пока нет
- Assignment 1 Low Temperature and SuperconductivityДокумент3 страницыAssignment 1 Low Temperature and SuperconductivityNadhrah MuradОценок пока нет
- Lean Thinking Redefines O&M PracticesДокумент10 страницLean Thinking Redefines O&M PracticesAsel Juárez ViteОценок пока нет
- Motorized Hydraulic PressДокумент4 страницыMotorized Hydraulic PressDhiraj Shinde100% (2)
- Deckwatchkeeping 1 - Collision RegulationДокумент13 страницDeckwatchkeeping 1 - Collision RegulationLalyn Navora BalansagОценок пока нет
- Btree Practice ProbsДокумент2 страницыBtree Practice ProbsAbyssman ManОценок пока нет
- Diprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4Документ2 страницыDiprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4tobiloba temiОценок пока нет
- Fifth Wheel, Design and FunctionДокумент17 страницFifth Wheel, Design and FunctionRobert Orosco B.Оценок пока нет
- Empaque Espirometalicos PDFДокумент50 страницEmpaque Espirometalicos PDFgregorioОценок пока нет
- Remote Log-In, Electronic Mail and File Transfer: Solutions To Odd-Numbered Review Questions and ExercisesДокумент2 страницыRemote Log-In, Electronic Mail and File Transfer: Solutions To Odd-Numbered Review Questions and ExercisesAnurag UpadhyayОценок пока нет
- Industrial Engineering - Paradoxical Twins - Acme and Omega ElectronicsДокумент2 страницыIndustrial Engineering - Paradoxical Twins - Acme and Omega Electronicslollypop0606Оценок пока нет
- Metrolla Steels Industrial Visit ReportДокумент39 страницMetrolla Steels Industrial Visit ReportSanjay R Nair100% (1)
- Verilog Implementation of Reed - Solomon CodeДокумент16 страницVerilog Implementation of Reed - Solomon CodeManik Prabhu ChillalОценок пока нет
- XXX Lss XXX: NotesДокумент2 страницыXXX Lss XXX: NotesMoisés Vázquez ToledoОценок пока нет
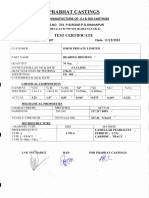
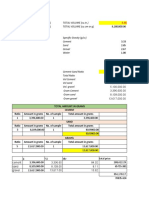
- Omfb MTC 11.12.23Документ2 страницыOmfb MTC 11.12.23obviousplatinum2Оценок пока нет
- 08 Sep-603b Thol Ret 670Документ9 страниц08 Sep-603b Thol Ret 670m khОценок пока нет
- Java Swing Demo (Class Name Test)Документ2 страницыJava Swing Demo (Class Name Test)bejarunОценок пока нет
- CS193a Android ProgrammingДокумент4 страницыCS193a Android Programmingrosy01710Оценок пока нет
- d8n Wiring HardnessДокумент2 страницыd8n Wiring HardnessandraОценок пока нет
- Computation For Concrete Mix 120221Документ3 страницыComputation For Concrete Mix 120221MASGRO BUILDERSОценок пока нет
- Assignment 1: Drive Fundamentals: (4 Marks)Документ1 страницаAssignment 1: Drive Fundamentals: (4 Marks)kd35Оценок пока нет
- Detailed Lesson Plan in IctДокумент4 страницыDetailed Lesson Plan in IctJai AidamusОценок пока нет
- Distance Measuring EquipmentДокумент12 страницDistance Measuring Equipmentमेनसन लाखेमरूОценок пока нет
- 240-109607332 Eskom Plant Labelling Abbreviation StandardДокумент638 страниц240-109607332 Eskom Plant Labelling Abbreviation StandardiabhuaОценок пока нет
- DMPCДокумент49 страницDMPCiprassandyОценок пока нет
- Thesis Chapter 1Документ27 страницThesis Chapter 1Jefferson Ayubo BroncanoОценок пока нет
- LODLOD Church Cost Proposal For Supply of Labor of 6" CHB With Lintel Beam/ColumnДокумент1 страницаLODLOD Church Cost Proposal For Supply of Labor of 6" CHB With Lintel Beam/ColumnJeve MilitanteОценок пока нет
- BSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFДокумент37 страницBSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFjvdkjdlkkОценок пока нет
- SA-6 Press KitДокумент53 страницыSA-6 Press KitBob Andrepont100% (1)