Вам также может понравиться
- Design - Concept - JAPANESE DEVELOPMENT OF EARTHQUAKE RESISTANT BUILDING DESIGN PDFДокумент15 страницDesign - Concept - JAPANESE DEVELOPMENT OF EARTHQUAKE RESISTANT BUILDING DESIGN PDFCem TuraОценок пока нет
- Outline of Earthquake Provisions in The Japanese Building CodesДокумент39 страницOutline of Earthquake Provisions in The Japanese Building CodesBrian TaylorОценок пока нет
- Effect of Lead Rubber Bearing CharacteristicsДокумент11 страницEffect of Lead Rubber Bearing Characteristicsümit özkanОценок пока нет
- Seismic Design and Ductile Detailing - BIT WardhaДокумент109 страницSeismic Design and Ductile Detailing - BIT WardhaDIPAK VINAYAK SHIRBHATEОценок пока нет
- Br. No.-312 AДокумент99 страницBr. No.-312 AShashibhushan SinghОценок пока нет
- Base Isolation DesignДокумент23 страницыBase Isolation Designprraaddeej chatel100% (1)
- Final Report - MR - Hari Krishna MaharjanДокумент35 страницFinal Report - MR - Hari Krishna MaharjanSurendra MaharjanОценок пока нет
- SCIA1203Документ392 страницыSCIA1203Issac JasminОценок пока нет
- Optimize Positioning of Relief Shelf in Cantilever Retaining WallДокумент3 страницыOptimize Positioning of Relief Shelf in Cantilever Retaining WallGRD Journals100% (1)
- Limitations of Indian Seismic Design Codes For RC BuildingsДокумент8 страницLimitations of Indian Seismic Design Codes For RC Buildingsyasser_goldstoneОценок пока нет
- Bridge Engineer in 01 WaddДокумент1 228 страницBridge Engineer in 01 WaddManoranjan KhamariОценок пока нет
- RCC BASE SHEAR CALCULATION FOR DIFFERENT ZONESДокумент7 страницRCC BASE SHEAR CALCULATION FOR DIFFERENT ZONESsurendra bhattaОценок пока нет
- Case StudyДокумент11 страницCase StudyGuransh SinghОценок пока нет
- Comparative Study of Waffle Slab With Bracing System and Conventional Slabs Without Bracing SystemДокумент8 страницComparative Study of Waffle Slab With Bracing System and Conventional Slabs Without Bracing SystemIJRASETPublicationsОценок пока нет
- Vulnerability Study For Roads and Bridges in KathmanduДокумент49 страницVulnerability Study For Roads and Bridges in KathmanduAshish ShresthaОценок пока нет
- Earthquake Resistant Design of Structures PDFДокумент3 страницыEarthquake Resistant Design of Structures PDFPraveen JainОценок пока нет
- Seismic Design Requirements and Construction Challenges of Lifeline Essential and Critical BridgesДокумент44 страницыSeismic Design Requirements and Construction Challenges of Lifeline Essential and Critical BridgesJack JackОценок пока нет
- Time History Analysis For Performance Based DesignДокумент8 страницTime History Analysis For Performance Based DesignhuyxpkissОценок пока нет
- Multi-Storeyed BuildingsДокумент58 страницMulti-Storeyed Buildingshemant_durgawaleОценок пока нет
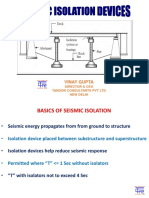
- Lecture 8 - MR Vinay Gupta On Seicmic Isolation DevicesДокумент59 страницLecture 8 - MR Vinay Gupta On Seicmic Isolation DevicesSulabh GuptaОценок пока нет
- P2 H SubbaraoДокумент11 страницP2 H SubbaraoSony JsdОценок пока нет
- Chapter-4 - Analysis of Wind Load Lecture-OneДокумент121 страницаChapter-4 - Analysis of Wind Load Lecture-OneTadesse Megersa100% (1)
- Transforming Railways Seismic CodeДокумент39 страницTransforming Railways Seismic CodevigneshrajamanickamОценок пока нет
- Emerging Seismic DesignДокумент18 страницEmerging Seismic DesignspruhatechОценок пока нет
- Capacity Spectrum MethodДокумент8 страницCapacity Spectrum MethodJashwin UllalОценок пока нет
- IMPLICATION OF IRC 112 ON RCC BRIDGE DESIGNДокумент8 страницIMPLICATION OF IRC 112 ON RCC BRIDGE DESIGNkrunalОценок пока нет
- Steel Connections-Lacing-Bridge BearingДокумент11 страницSteel Connections-Lacing-Bridge BearingRaheelAfzaalОценок пока нет
- Relating Seismic Design Level and Seismic Performance: Fragility-Based Investigation of RC Moment-Resisting Frame Buildings in ChinaДокумент13 страницRelating Seismic Design Level and Seismic Performance: Fragility-Based Investigation of RC Moment-Resisting Frame Buildings in ChinaAniket DubeОценок пока нет
- Chapter 3 Direct Displacement Based DesignДокумент68 страницChapter 3 Direct Displacement Based DesignMuhammadNomanKОценок пока нет
- Pile CapДокумент7 страницPile CapBasava SrikanthОценок пока нет
- Structural Design ReportДокумент208 страницStructural Design Reportmohan sundarОценок пока нет
- Second Narmada BridgeДокумент1 страницаSecond Narmada BridgedarmumbaiОценок пока нет
- Presentationfinal 181109153810 PDFДокумент46 страницPresentationfinal 181109153810 PDFZohaibShoukatBalochОценок пока нет
- Probabilistic Seismic Hazard Analysis Nepal (Solukhumbu) Complete ReportДокумент74 страницыProbabilistic Seismic Hazard Analysis Nepal (Solukhumbu) Complete ReportSabin AcharyaОценок пока нет
- 02B Design of Bridges FE Training 101718Документ88 страниц02B Design of Bridges FE Training 101718Limuel Richa Paghubasan TrangiaОценок пока нет
- RCC Slab Bridge Design 10 M - 2022Документ7 страницRCC Slab Bridge Design 10 M - 2022erzahid ahmadОценок пока нет
- Design Loads for Sub-StructuresДокумент72 страницыDesign Loads for Sub-Structuresmayank007aggarwalОценок пока нет
- Sunita BhusalДокумент35 страницSunita BhusalAbhay SuwalОценок пока нет
- Design of 75Kl Zinc Alume (Znal) Elevated Water Storage TankДокумент26 страницDesign of 75Kl Zinc Alume (Znal) Elevated Water Storage TankSmit PatelОценок пока нет
- Liquefaction Potential of Cohesionless SoilsДокумент80 страницLiquefaction Potential of Cohesionless SoilsBrice DurandОценок пока нет
- By R.JeyanthiДокумент21 страницаBy R.JeyanthiAlla Eddine G CОценок пока нет
- Earthquake Resistant RCC Structures and Ductile DetailingДокумент23 страницыEarthquake Resistant RCC Structures and Ductile DetailingFaraaz FaisalОценок пока нет
- 85-93 Ahmad Abdelrazaq - Foundation Design of The 151 Incheon Tower in A Reclamation AreaДокумент9 страниц85-93 Ahmad Abdelrazaq - Foundation Design of The 151 Incheon Tower in A Reclamation AreaMagdy BakryОценок пока нет
- IrcДокумент9 страницIrcAshwani KesharwaniОценок пока нет
- Staad Model For Analysis of Bridge GirderДокумент23 страницыStaad Model For Analysis of Bridge GirderArushiBiswasОценок пока нет
- IIT Roorkee Prof Discusses Evolution of Earthquake Resistant DesignДокумент11 страницIIT Roorkee Prof Discusses Evolution of Earthquake Resistant DesignsudhajagannathanОценок пока нет
- Loads For Design of Sub-Structure 28.12.20Документ72 страницыLoads For Design of Sub-Structure 28.12.20mayank007aggarwal100% (1)
- Cable-Stay Bridges-Investigation of Cable Rupture PDFДокумент10 страницCable-Stay Bridges-Investigation of Cable Rupture PDFMassimo Averardi RipariОценок пока нет
- Design and Construction of Reinforced Concrete Chimneys (ACI 307-98) PDFДокумент17 страницDesign and Construction of Reinforced Concrete Chimneys (ACI 307-98) PDFCristobal Jimenez MuchoОценок пока нет
- 4 Standards and Preliminary Design of Bridges 23Документ26 страниц4 Standards and Preliminary Design of Bridges 23Praveen BhandariОценок пока нет
- Bridge 3exampleДокумент84 страницыBridge 3exampletrabajosicОценок пока нет
- Differences between Indian and Chinese structural codesДокумент4 страницыDifferences between Indian and Chinese structural codesMuralidhar SivarajuОценок пока нет
- Cipl MJB 1+055.734 DGN 004Документ60 страницCipl MJB 1+055.734 DGN 004rao shoaibОценок пока нет
- App5 EC2 DesignДокумент70 страницApp5 EC2 Designm_ganea268973Оценок пока нет
- Seismic Arrester DesignДокумент14 страницSeismic Arrester DesignMahendra SuryavanshiОценок пока нет
- 6 Halaba Bridge PierДокумент79 страниц6 Halaba Bridge PierReader of Down HillОценок пока нет
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОт EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОценок пока нет
- Inverted-T Bent Cap Calculations V1Документ20 страницInverted-T Bent Cap Calculations V1satyaОценок пока нет
- Nsba Basics of Steel Bridge Design Workshop - Part 2Документ72 страницыNsba Basics of Steel Bridge Design Workshop - Part 2Luis CortesОценок пока нет
- Background and Introduction of The ProblemДокумент48 страницBackground and Introduction of The ProblemElizebethОценок пока нет
- The Benefits of Radio Broadcasting As Perceived by The People in Rural AreasДокумент10 страницThe Benefits of Radio Broadcasting As Perceived by The People in Rural AreasMaeОценок пока нет
- Digital Citizenship RubricДокумент1 страницаDigital Citizenship Rubricapi-300964436Оценок пока нет
- Standard:: SS2H1 The Student Will Read About and Describe The Lives of Historical Figures in Georgia HistoryДокумент4 страницыStandard:: SS2H1 The Student Will Read About and Describe The Lives of Historical Figures in Georgia Historyjeffmiller1977Оценок пока нет
- Chemistry An Introduction To General Organic and Biological Chemistry Timberlake 12th Edition Test BankДокумент12 страницChemistry An Introduction To General Organic and Biological Chemistry Timberlake 12th Edition Test Banklaceydukeqtgxfmjkod100% (46)
- EssayДокумент2 страницыEssaySantoshKumarPatraОценок пока нет
- Detection of Self-Mutating Computer VirusesДокумент17 страницDetection of Self-Mutating Computer VirusesVMads3850Оценок пока нет
- Proposal LayoutДокумент11 страницProposal Layoutadu g100% (1)
- A&P Book - Aeronautical Charts and CompassДокумент17 страницA&P Book - Aeronautical Charts and CompassHarry NuryantoОценок пока нет
- Leader 2Документ13 страницLeader 2Abid100% (1)
- SWR SRB Product SheetДокумент2 страницыSWR SRB Product SheetCarlo AguiluzОценок пока нет
- Equipment BrochureДокумент60 страницEquipment BrochureAmar BeheraОценок пока нет
- Seminar Report On Satellite CommunicationДокумент17 страницSeminar Report On Satellite CommunicationHapi ER67% (6)
- Cbcs Syllabus 2016-17 Admn Batch 30.07.16Документ23 страницыCbcs Syllabus 2016-17 Admn Batch 30.07.16Sushree sonali NayakОценок пока нет
- Introduction To Literary TheoryДокумент3 страницыIntroduction To Literary TheoryAnil Pinto100% (4)
- Chrome FlagsДокумент12 страницChrome Flagsmeraj1210% (1)
- Lab 3 DiscussionДокумент2 страницыLab 3 DiscussionMarlee WhiteОценок пока нет
- David Sosa - The Import of The Puzzle About BeliefДокумент31 страницаDavid Sosa - The Import of The Puzzle About BeliefSr. DanieoОценок пока нет
- DN 6720 PDFДокумент12 страницDN 6720 PDFChandan JhaОценок пока нет
- University of Leicester - Involving Your AudienceДокумент4 страницыUniversity of Leicester - Involving Your Audiencevalentina zabalaОценок пока нет
- Constructed Wetland Design Guidelines for DevelopersДокумент32 страницыConstructed Wetland Design Guidelines for DevelopersBere QuintosОценок пока нет
- Friction Stir Welding: Principle of OperationДокумент12 страницFriction Stir Welding: Principle of OperationvarmaprasadОценок пока нет
- I-K Bus Codes v6Документ41 страницаI-K Bus Codes v6Dobrescu CristianОценок пока нет
- SINGLE OPTION CORRECT ACCELERATIONДокумент5 страницSINGLE OPTION CORRECT ACCELERATIONShiva Ram Prasad PulagamОценок пока нет
- Project SELF Work Plan and BudgetДокумент3 страницыProject SELF Work Plan and BudgetCharede BantilanОценок пока нет
- "Difference Between Private and Public Nuisance": Law of TortsДокумент4 страницы"Difference Between Private and Public Nuisance": Law of Tortsaridaman raghuvanshiОценок пока нет
- 11 - Chapter 5 PDFДокумент35 страниц11 - Chapter 5 PDFlouisОценок пока нет
- Object Oriented Assignment GuideДокумент10 страницObject Oriented Assignment GuideThiviyaa DarshiniОценок пока нет
- Wave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasДокумент32 страницыWave Hydro Dynamics Prof. V. Sundar Department of Ocean Engineering Indian Institute of Technology, MadrasMuralidhar YarakalaОценок пока нет
- Reasoning Olympiads Mind Map Class 3Документ7 страницReasoning Olympiads Mind Map Class 3vikasОценок пока нет