Вам также может понравиться
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОт EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsОценок пока нет
- The Implementation of Estimation and Correction of Carrier Frequency Offset of COFDM System in DAB ReceiverДокумент4 страницыThe Implementation of Estimation and Correction of Carrier Frequency Offset of COFDM System in DAB Receiverashu_4novОценок пока нет
- Removal of DCДокумент7 страницRemoval of DCsirisiri100Оценок пока нет
- Analysis of The Behavior of One Digital Distance Relay Under Islanding Condition With ATPДокумент6 страницAnalysis of The Behavior of One Digital Distance Relay Under Islanding Condition With ATPJaime Florez ChoqueОценок пока нет
- All Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán ArévaloДокумент6 страницAll Digital Timing Recovery and FPGA Implementation: Daniel Cárdenas, Germán Arévalom0hmdОценок пока нет
- Symbol Timing Recovery Fo A Class of Constant Envelope SignalsДокумент4 страницыSymbol Timing Recovery Fo A Class of Constant Envelope Signalsjoe2001coolОценок пока нет
- Field Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterДокумент4 страницыField Programmable Gate Array Implementation of 14 Bit Sigma-Delta Analog To Digital ConverterInternational Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- N-Continuous Distortion For MIMO OFDM: Iterative Estimation and Cancellation of SystemsДокумент4 страницыN-Continuous Distortion For MIMO OFDM: Iterative Estimation and Cancellation of SystemsMedhat MohОценок пока нет
- Pico Second Labs PDFДокумент5 страницPico Second Labs PDFVenkatesh KarriОценок пока нет
- Digital Control Systems Unit IДокумент18 страницDigital Control Systems Unit Iyanith kumarОценок пока нет
- N DSP6Документ10 страницN DSP6soumikaОценок пока нет
- Method For Converter Synchronization With RF InjectionДокумент8 страницMethod For Converter Synchronization With RF InjectionAI Coordinator - CSC JournalsОценок пока нет
- Analog To Digital ConversionДокумент11 страницAnalog To Digital Conversionsaurabh2078Оценок пока нет
- Sistem Kontrol Digital: Bab 1. PendahuluanДокумент62 страницыSistem Kontrol Digital: Bab 1. PendahuluanMuhammad TaufikОценок пока нет
- A New Approach To Design Low PowerДокумент7 страницA New Approach To Design Low Powerdool5649Оценок пока нет
- Pseudorandom Clock Signal Generation For Data Conversion in A Multistandard ReceiverДокумент4 страницыPseudorandom Clock Signal Generation For Data Conversion in A Multistandard ReceiverSiddharthJainОценок пока нет
- Digitally Removing A DC Offset: DSP Without Mathematics: WP279 (v1.0) July 18, 2008Документ16 страницDigitally Removing A DC Offset: DSP Without Mathematics: WP279 (v1.0) July 18, 2008santanu_sinha87Оценок пока нет
- Digital Filter Design-DSPДокумент113 страницDigital Filter Design-DSPClique for Applied Research in Electronic Technology100% (2)
- Digital Control Systems: Lecture NotesДокумент61 страницаDigital Control Systems: Lecture NotesHari Pavan0391Оценок пока нет
- Weekly PP PDFДокумент11 страницWeekly PP PDFDanielHaileОценок пока нет
- An Efficient Decimation Sinc-Filter Design For Software Radio ApplicationsДокумент3 страницыAn Efficient Decimation Sinc-Filter Design For Software Radio ApplicationsSumeet KalraОценок пока нет
- ECEN325 Lab ManualДокумент66 страницECEN325 Lab ManualIrwan RamliОценок пока нет
- Microcontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protection PDFДокумент7 страницMicrocontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protection PDFarsalanhamidОценок пока нет
- Sampling and Sampled-Data SystemsДокумент20 страницSampling and Sampled-Data SystemsAmit KumarОценок пока нет
- Paper Type: Whole Testpaper Test Date: 4 May 2008Документ12 страницPaper Type: Whole Testpaper Test Date: 4 May 2008Ayushi MaithaniОценок пока нет
- Digital Communication Lab ManualДокумент52 страницыDigital Communication Lab ManualPRIYA RAJI100% (3)
- Chapter 2 Discrete Data Control SystemsДокумент78 страницChapter 2 Discrete Data Control SystemsAmruth ThelkarОценок пока нет
- Comparison of ModulationДокумент6 страницComparison of ModulationrakshitharaviОценок пока нет
- CT Saturation 1Документ6 страницCT Saturation 111389Оценок пока нет
- 00001476Документ8 страниц00001476damaya1701Оценок пока нет
- OFDM For Optical CommunicationsДокумент41 страницаOFDM For Optical CommunicationsPrasanna Kumar100% (1)
- Telecom - Exp - 10 - QAM, MSK, & GMSKДокумент15 страницTelecom - Exp - 10 - QAM, MSK, & GMSKrakibОценок пока нет
- A Simple Current-Mode Quadrature Oscillator Using Single CDTAДокумент8 страницA Simple Current-Mode Quadrature Oscillator Using Single CDTAa_damrongОценок пока нет
- A Direct Digital Frequency Synthesizer Utilizing Quasi-Linear Interpolation MethodДокумент5 страницA Direct Digital Frequency Synthesizer Utilizing Quasi-Linear Interpolation MethodYermakov Vadim IvanovichОценок пока нет
- DC Manual FinalДокумент42 страницыDC Manual FinalsrvsbondОценок пока нет
- Fujimoto - 2007Документ6 страницFujimoto - 2007Ariana Ribeiro LameirinhasОценок пока нет
- Software Phase Locked LoopДокумент7 страницSoftware Phase Locked LoopBinyam YohannesОценок пока нет
- Discrete Wavelet Transform Using Circular ConvolutionДокумент6 страницDiscrete Wavelet Transform Using Circular ConvolutionijsretОценок пока нет
- Synchronization in IEEE 802.15.4 Zigbee Transceiver Using Matlab SimulinkДокумент5 страницSynchronization in IEEE 802.15.4 Zigbee Transceiver Using Matlab SimulinktesteОценок пока нет
- Design of Digital Filters IIR, Butterworth FilterДокумент8 страницDesign of Digital Filters IIR, Butterworth FilterI am not a proОценок пока нет
- Microcontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault ProtectionДокумент7 страницMicrocontroller Based Overcurrent Relay and Directional Overcurrent Relay With Ground Fault Protectiondebasishmee5808Оценок пока нет
- DCC2006 SoundCardProgramming F6CTEДокумент6 страницDCC2006 SoundCardProgramming F6CTEProyec YectosОценок пока нет
- Chapter 2 Discrete Data Control SystemsДокумент70 страницChapter 2 Discrete Data Control SystemsAmruth Thelkar67% (3)
- Signal Processing in Digital ControlДокумент40 страницSignal Processing in Digital ControlSaiRoopa GaliveetiОценок пока нет
- Digital Control Methods Sharing Synchronous Converter: For Current of Interleaved Buck AndreassenДокумент7 страницDigital Control Methods Sharing Synchronous Converter: For Current of Interleaved Buck Andreassenrmsharma1970Оценок пока нет
- DC Lab ManualДокумент24 страницыDC Lab Manualvidyae100% (2)
- Bilinear Tranformation2Документ11 страницBilinear Tranformation2Ayodele Emmanuel SonugaОценок пока нет
- Analog Calibration of Channel Mismatches in Time-Interleaved AdcsДокумент4 страницыAnalog Calibration of Channel Mismatches in Time-Interleaved AdcsRajeev PandeyОценок пока нет
- Robust Tuning Procedures of Dead-Time Compensating ControllersДокумент28 страницRobust Tuning Procedures of Dead-Time Compensating ControllersNadir ZubovićОценок пока нет
- Es1107 Assignment-01Документ6 страницEs1107 Assignment-01K. BHANU PRAKASH REDDYОценок пока нет
- Iscas06 Random SamplingДокумент4 страницыIscas06 Random SamplingJaswinder Pal BehlОценок пока нет
- Carrier and Timing Synchronization of BPSK Via LDPC Code FeedbackДокумент5 страницCarrier and Timing Synchronization of BPSK Via LDPC Code FeedbackJamil AhmadОценок пока нет
- Modeling and Analysis of DC-DC Converters Under Pulse Skipping ModulationДокумент6 страницModeling and Analysis of DC-DC Converters Under Pulse Skipping ModulationJeba AntonyОценок пока нет
- EC 6512 CS Lab ManualДокумент58 страницEC 6512 CS Lab ManualPraveen Kumar33% (6)
- Understanding Sequential Circuit TimingДокумент8 страницUnderstanding Sequential Circuit Timingchuku7Оценок пока нет
- Digital Pulse Processor Using A Moving Average TechniqueДокумент3 страницыDigital Pulse Processor Using A Moving Average TechniqueHung Tran VietОценок пока нет
- Itt - (J+L) TI.v (T-JT) J: (Half Short-Circuits) .) )Документ8 страницItt - (J+L) TI.v (T-JT) J: (Half Short-Circuits) .) )Luisa De CairesОценок пока нет
- Me 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesДокумент13 страницMe 365 Experiment 2 Introduction To Digital Data Acquisition ObjectivesSenthil KumarОценок пока нет
- Fixed-Network Automatic Meter Reading (AMR) SystemДокумент90 страницFixed-Network Automatic Meter Reading (AMR) SystemRamadan100% (19)
- Acs 2019s1 Assn1Документ5 страницAcs 2019s1 Assn1MiraelОценок пока нет
- Mef 1Документ9 страницMef 1DadangОценок пока нет
- Basic Engineering Circuit Analysis 10thДокумент185 страницBasic Engineering Circuit Analysis 10thdiogo millnitzОценок пока нет
- DatasheetДокумент8 страницDatasheetStuxnetОценок пока нет
- Pt. Asia Networks Product Guide: TelcoДокумент6 страницPt. Asia Networks Product Guide: Telcohendra irawanОценок пока нет
- Design of Analog CMOS Integrated CircuitsДокумент7 страницDesign of Analog CMOS Integrated CircuitsKuroko TetsuyaОценок пока нет
- GPS Antenna AppNote (GPS X 08014)Документ40 страницGPS Antenna AppNote (GPS X 08014)VirginiaLanciОценок пока нет
- A1512 Panasonic SemiconductorДокумент2 страницыA1512 Panasonic SemiconductorbrneiОценок пока нет
- DSP Notes KAR Part2Документ23 страницыDSP Notes KAR Part2Srinivas VNОценок пока нет
- Lab 6 - Potentiometer & Servo MotorДокумент7 страницLab 6 - Potentiometer & Servo MotorChristy CheriyanОценок пока нет
- Supermicro X9SCM QRMДокумент1 страницаSupermicro X9SCM QRMmoon5397Оценок пока нет
- MMG Ferrite RMДокумент15 страницMMG Ferrite RMalphawarОценок пока нет
- CPE440 - Computer Architecture - FA20 - S1 PDFДокумент1 страницаCPE440 - Computer Architecture - FA20 - S1 PDFAbdullahОценок пока нет
- WT8072Документ5 страницWT8072hectcandОценок пока нет
- G83 2 ChangesДокумент2 страницыG83 2 ChangesJohnWilliamsОценок пока нет
- (MWRF0211) Buffer Amplifiers Solve VCO ProblemsДокумент2 страницы(MWRF0211) Buffer Amplifiers Solve VCO ProblemsLuís Ki-llahОценок пока нет
- 9300 Decoder User Manual-V1.0Документ30 страниц9300 Decoder User Manual-V1.0Roberto Leonardo RiveroОценок пока нет
- DICA Lab Manual PDFДокумент64 страницыDICA Lab Manual PDFssptc MagazineОценок пока нет
- Circuit Diagrams: 1. Smps - Power #1 Circuit DiagramДокумент2 страницыCircuit Diagrams: 1. Smps - Power #1 Circuit DiagramOrlando BurgosОценок пока нет
- Vda Riasspowertv05 IngДокумент9 страницVda Riasspowertv05 IngRedah HamedОценок пока нет
- ISP Technologies DAAT Power Amplifier Technology White Paper PDFДокумент9 страницISP Technologies DAAT Power Amplifier Technology White Paper PDFHumberto D PertuzОценок пока нет
- RC 1976 12Документ66 страницRC 1976 12Jan Pran100% (1)
- Complementary Output Hall Effect Latch Ah277AДокумент10 страницComplementary Output Hall Effect Latch Ah277ATv RafeОценок пока нет
- MO Level Alarm Class Alam CodeДокумент3 страницыMO Level Alarm Class Alam Codehjk6500Оценок пока нет
- Bus Admittance MatrixДокумент13 страницBus Admittance MatrixParthasarathy Gokul EОценок пока нет
- 3phase-Solved Problems-Joshua L. PalizaДокумент10 страниц3phase-Solved Problems-Joshua L. Palizajoshua palizaОценок пока нет
- Kamath Pole ZeroДокумент6 страницKamath Pole ZeroVenkatesh TatikondaОценок пока нет
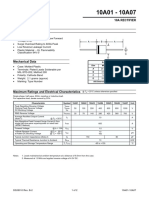
- 10A Rectifier FeaturesДокумент2 страницы10A Rectifier Featureslecteur scribdОценок пока нет
- EE 311 Analog Electronics Take-Home Exam Part 7 Due On 12/11/2014Документ1 страницаEE 311 Analog Electronics Take-Home Exam Part 7 Due On 12/11/2014Burakcan GuvenirОценок пока нет