Вам также может понравиться
- Lorad Elite Manual de ServicioДокумент188 страницLorad Elite Manual de Serviciokizen_5100% (11)
- Producción de espejos: flujo lineal y política PullДокумент18 страницProducción de espejos: flujo lineal y política PulldiegoОценок пока нет
- Tutorial Excel Medallas OlimpicasДокумент20 страницTutorial Excel Medallas OlimpicasFrancisco Patricio Elles MatusОценок пока нет
- Sopa de Letras de Sistemas de Información II 2Документ1 страницаSopa de Letras de Sistemas de Información II 2Alejandro Gutierrez0% (1)
- PNF-Mecánica-Líneas InvestigaciónДокумент8 страницPNF-Mecánica-Líneas InvestigaciónLuis OllarvesОценок пока нет
- PRACTICUM 5 Diseño de ProductosДокумент2 страницыPRACTICUM 5 Diseño de ProductosLuis OllarvesОценок пока нет
- MINUTA010622CPДокумент6 страницMINUTA010622CPLuis OllarvesОценок пока нет
- Apuntes de Matematica I CompletoДокумент130 страницApuntes de Matematica I CompletoLuis OllarvesОценок пока нет
- 3 Informe de Avance Tesis BiomasaДокумент2 страницы3 Informe de Avance Tesis BiomasaLuis OllarvesОценок пока нет
- Diseño Maquina DestiladoraДокумент9 страницDiseño Maquina DestiladoraLuis OllarvesОценок пока нет
- Biomasa PDFДокумент91 страницаBiomasa PDFwalterОценок пока нет
- 029 Norma Tecnica Despliegue Redes Fisicas Servicios TelecomunicacionesДокумент43 страницы029 Norma Tecnica Despliegue Redes Fisicas Servicios TelecomunicacionesLourdes VeraОценок пока нет
- Modelo de Presentacion para ComunidadДокумент13 страницModelo de Presentacion para ComunidadLuis OllarvesОценок пока нет
- Proyecto de Tesis Andres Ricardo Cando ChiribogaДокумент131 страницаProyecto de Tesis Andres Ricardo Cando ChiribogaLuis OllarvesОценок пока нет
- Planificacion de Productos 2Документ12 страницPlanificacion de Productos 2Luis OllarvesОценок пока нет
- Taller elaboración matriz FLOR Institución Universitaria de Envigado - IUEДокумент31 страницаTaller elaboración matriz FLOR Institución Universitaria de Envigado - IUELuis OllarvesОценок пока нет
- Presentacion de AvanceДокумент12 страницPresentacion de AvanceLuis OllarvesОценок пока нет
- Tareas RealizadasДокумент1 страницаTareas RealizadasLuis OllarvesОценок пока нет
- Dia de HabitatДокумент2 страницыDia de HabitatLuis OllarvesОценок пока нет
- Programa NuevoteДокумент15 страницPrograma NuevoteLuis OllarvesОценок пока нет
- Deshidratador Lisbett CorregДокумент55 страницDeshidratador Lisbett CorregLuis OllarvesОценок пока нет
- 2tarea 1 NegocioДокумент20 страниц2tarea 1 NegocioLuis OllarvesОценок пока нет
- Programa InstruccionalДокумент11 страницPrograma InstruccionalLuis OllarvesОценок пока нет
- Informe de La Actividad Fisica Mayela Sanchez PNFIДокумент3 страницыInforme de La Actividad Fisica Mayela Sanchez PNFILuis OllarvesОценок пока нет
- Obras MiserДокумент2 страницыObras MiserLuis OllarvesОценок пока нет
- Plan de Evaluación Diseño de Máquinas (TIV-t1) (SX4AC01) (2015)Документ6 страницPlan de Evaluación Diseño de Máquinas (TIV-t1) (SX4AC01) (2015)Luis OllarvesОценок пока нет
- Proyecto Pulverizadora de Maiz Avance 2Документ31 страницаProyecto Pulverizadora de Maiz Avance 2Luis OllarvesОценок пока нет
- Informe FinalДокумент7 страницInforme FinalLuis OllarvesОценок пока нет
- 3er Año MatematicasДокумент5 страниц3er Año MatematicasLuis OllarvesОценок пока нет
- Informe de La Actividad Fisica Mayela Sanchez PNFIДокумент3 страницыInforme de La Actividad Fisica Mayela Sanchez PNFILuis OllarvesОценок пока нет
- TALLER SOBRE UNIDAD I PRACTICO VERSION 2021 (Autoguardado) - para CombinarДокумент12 страницTALLER SOBRE UNIDAD I PRACTICO VERSION 2021 (Autoguardado) - para CombinarLuis OllarvesОценок пока нет
- Demencia SenilДокумент13 страницDemencia Senilaracely2306100% (3)
- Maquinas CC y Ca4Документ7 страницMaquinas CC y Ca4Luis OllarvesОценок пока нет
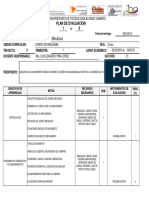
- PLANIFICACIONДокумент3 страницыPLANIFICACIONLuis OllarvesОценок пока нет
- Modificar Juegos PDFДокумент15 страницModificar Juegos PDFRomán Alberto Candiani GonzálezОценок пока нет
- Manual Corel X7Документ50 страницManual Corel X7RossОценок пока нет
- Auto Cad 2005 Gui AДокумент52 страницыAuto Cad 2005 Gui AAngelica Maria Alvira MartinezОценок пока нет
- Evaluacion Sistema de Gestión de La Seguridad - ScribdДокумент7 страницEvaluacion Sistema de Gestión de La Seguridad - ScribdOrlando Enrique Velasquez Morales100% (1)
- CIM-Orizaba-2019: Coloquio de Investigación MultidisciplinariaДокумент4 страницыCIM-Orizaba-2019: Coloquio de Investigación Multidisciplinariafernando espinosa vergaraОценок пока нет
- Curso PeopleCode D1Документ53 страницыCurso PeopleCode D1Alexvalenciaayola100% (1)
- Gunnebo Cerradura Electronica gsl1000 PDFДокумент2 страницыGunnebo Cerradura Electronica gsl1000 PDFJuanjo ReyesОценок пока нет
- Naturaleza y Propósito de Los ModelosДокумент17 страницNaturaleza y Propósito de Los ModelosClaudia PierriОценок пока нет
- Ejercicios 1 2013 ALGEBRA I Logica MatematicaДокумент8 страницEjercicios 1 2013 ALGEBRA I Logica Matematicajose_5_50_99926336Оценок пока нет
- Reglamento Seguridad Cibernetica de La Informacion PDFДокумент50 страницReglamento Seguridad Cibernetica de La Informacion PDFWascar ReyesОценок пока нет
- Conclusiones y Recomendaciones David VargasДокумент2 страницыConclusiones y Recomendaciones David VargasDavidCaloОценок пока нет
- Evaluacion de Java Semana 1Документ11 страницEvaluacion de Java Semana 1Jairo Antonio Muñoz0% (2)
- Guia Novatos DreamboxДокумент12 страницGuia Novatos DreamboxFelix RedondoОценок пока нет
- Novedades y Características de La MultimediaДокумент16 страницNovedades y Características de La MultimediaYasser MarinОценок пока нет
- Estudio de Caso Act 4Документ5 страницEstudio de Caso Act 4Gustavo MesaОценок пока нет
- La Esperanza MatemáticaДокумент3 страницыLa Esperanza MatemáticaAnaly Diaz PusmaОценок пока нет
- Revista Python 3Документ47 страницRevista Python 3Aprender LibreОценок пока нет
- Celulares BaratosДокумент6 страницCelulares BaratoscelularesbarotosОценок пока нет
- Practica FTPДокумент3 страницыPractica FTPDUVAN JAVIER ROJAS BENAVIDESОценок пока нет
- Algebra Lineal 1 GR 10Документ2 страницыAlgebra Lineal 1 GR 10Javier Hernando Ochoa ArteagaОценок пока нет
- Cisco Networking AcademyДокумент7 страницCisco Networking AcademyGustavo AlvarezОценок пока нет
- Taller Ejercicios PseintДокумент3 страницыTaller Ejercicios PseintYESID AMID AYOLA PEÑAОценок пока нет
- Modelos GerencialesДокумент6 страницModelos GerencialesEmi LopezОценок пока нет
- Evaluación de competencias científicasДокумент6 страницEvaluación de competencias científicasLupe Huanca ChalcoОценок пока нет
- 00 MatLab CaratulaДокумент3 страницы00 MatLab CaratuladenisОценок пока нет
- TELCELДокумент22 страницыTELCELFacundo Diaz Estrada0% (1)