Вам также может понравиться
- Lesson 3 - CCVC WordsДокумент8 страницLesson 3 - CCVC WordsNurture Programme100% (1)
- 5 CRCДокумент11 страниц5 CRCUthОценок пока нет
- LabVIEW PPT PresentationДокумент27 страницLabVIEW PPT PresentationRanadeep DeyОценок пока нет
- Micro Teaching Is A Best Example For SimulationДокумент2 страницыMicro Teaching Is A Best Example For SimulationdelnaОценок пока нет
- 09 Registered Teacher Criteria SelfДокумент15 страниц09 Registered Teacher Criteria Selfapi-300095367Оценок пока нет
- Introduction To Machine Learning: K-Nearest Neighbor AlgorithmДокумент25 страницIntroduction To Machine Learning: K-Nearest Neighbor AlgorithmAlwan SiddiqОценок пока нет
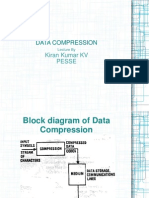
- Data Compression IntroДокумент107 страницData Compression Intromadanram100% (1)
- 715ECT04 Embedded Systems 2M & 16MДокумент32 страницы715ECT04 Embedded Systems 2M & 16Msumathi0% (1)
- Transmission MediaДокумент73 страницыTransmission Mediahardcore85Оценок пока нет
- Unit1introduction 150307091201 Conversion Gate01 PDFДокумент101 страницаUnit1introduction 150307091201 Conversion Gate01 PDFVipul KaushikОценок пока нет
- Chapter 4 - Models of Network and System AdministrationДокумент27 страницChapter 4 - Models of Network and System AdministrationasasaОценок пока нет
- 01.introducing To Routing and Packet ForwardingДокумент4 страницы01.introducing To Routing and Packet ForwardingjentriОценок пока нет
- Machine Learning NNДокумент16 страницMachine Learning NNMegha100% (1)
- Divide and ConquerДокумент50 страницDivide and Conquerjoe learioОценок пока нет
- Computer Network Module 1Документ205 страницComputer Network Module 1shakti139Оценок пока нет
- Topic - 1 - Characterization of Distributed SystemsДокумент53 страницыTopic - 1 - Characterization of Distributed SystemsAhmad Nazri IbrahimОценок пока нет
- Digital To Analog ConversionДокумент12 страницDigital To Analog ConversionMukti SharmaОценок пока нет
- Computer Network Module 2Документ160 страницComputer Network Module 2shakti139Оценок пока нет
- Pattern RecognitionДокумент57 страницPattern RecognitionTapasKumarDashОценок пока нет
- Machine Learning and Applications: AssignmentДокумент2 страницыMachine Learning and Applications: AssignmentSatish B basapurОценок пока нет
- Chapter 8 LAN Technologies and Network TopologyДокумент9 страницChapter 8 LAN Technologies and Network TopologyDhitya PujaramaОценок пока нет
- Digital Electronics & Computer OrganisationДокумент17 страницDigital Electronics & Computer Organisationabhishek125Оценок пока нет
- PPTДокумент21 страницаPPTVITHAL BABLEОценок пока нет
- Solution 1:: Big O - Order of MagnitudeДокумент20 страницSolution 1:: Big O - Order of MagnitudeAnam GhaffarОценок пока нет
- Omputer Communications and NetworksДокумент70 страницOmputer Communications and NetworksMomina ButtОценок пока нет
- Selected Topics in Computer Science CHДокумент24 страницыSelected Topics in Computer Science CHMehari TemesgenОценок пока нет
- Mmultimedia 3Документ45 страницMmultimedia 3iyasu ayenekulu100% (2)
- Computer Organization and ArchitectureДокумент2 страницыComputer Organization and ArchitectureNitin JaiswalОценок пока нет
- Chapter 1: NetworkingДокумент43 страницыChapter 1: NetworkingIzzati RahimОценок пока нет
- AI-Lecture 12 - Simple PerceptronДокумент24 страницыAI-Lecture 12 - Simple PerceptronMadiha Nasrullah100% (1)
- ITPEC2 - Platform TechnologiesДокумент19 страницITPEC2 - Platform TechnologiesJhe MaejanОценок пока нет
- CH4 - Linked ListДокумент65 страницCH4 - Linked ListRewina zerouОценок пока нет
- C++ ArraysДокумент42 страницыC++ ArraysabcОценок пока нет
- Data Structure and AlgorithmДокумент30 страницData Structure and AlgorithmMohammad AzeemОценок пока нет
- Project Synopsis On LAN ConnectionДокумент15 страницProject Synopsis On LAN ConnectionডৰাজবংশীОценок пока нет
- Introduction To Computer NetworksДокумент6 страницIntroduction To Computer Networksjoel lacayОценок пока нет
- Network ManagementДокумент39 страницNetwork ManagementDhanraj DSОценок пока нет
- CN Module I & IIДокумент99 страницCN Module I & IIsaumya ranjan sahuОценок пока нет
- Information TheoryДокумент30 страницInformation TheorySuhas Ns50% (2)
- Computer Security GoalsДокумент72 страницыComputer Security GoalsAnkur Agrawal100% (2)
- Operating System SyllabusДокумент2 страницыOperating System SyllabusAnonymous BMRvsO4Оценок пока нет
- Transmission ImpairmentsДокумент49 страницTransmission ImpairmentsLaurentiuStanciuОценок пока нет
- Networking Midterm PreparationДокумент2 страницыNetworking Midterm PreparationSopharoath LyОценок пока нет
- Module3 ISAДокумент51 страницаModule3 ISAwatsontamilОценок пока нет
- Unsupervised Learning by Suleiman M. AbdiДокумент45 страницUnsupervised Learning by Suleiman M. AbdiSuleiman GargaareОценок пока нет
- Point Estimation: Definition of EstimatorsДокумент8 страницPoint Estimation: Definition of EstimatorsUshnish MisraОценок пока нет
- Supervised Learning (Classification and Regression)Документ14 страницSupervised Learning (Classification and Regression)shreya sarkarОценок пока нет
- L01 IntroductionToComputerSystemsДокумент17 страницL01 IntroductionToComputerSystemsDyan AngelicaОценок пока нет
- Introduction To Machine Learning PPT MainДокумент15 страницIntroduction To Machine Learning PPT Mainap6277Оценок пока нет
- Software Testing MethodologiesДокумент40 страницSoftware Testing MethodologiesUjwala BhogaОценок пока нет
- Interprocess CommunicationДокумент16 страницInterprocess CommunicationVinuthna ReddyОценок пока нет
- Data Communications & NetworkingДокумент2 страницыData Communications & Networkingluutin100% (2)
- Data Link LayerДокумент107 страницData Link LayerRekha V RОценок пока нет
- A Complete Note On OOP (C++)Документ155 страницA Complete Note On OOP (C++)bishwas pokharelОценок пока нет
- OOP - Final Notes PDFДокумент133 страницыOOP - Final Notes PDFAnonymous eV1QpyRОценок пока нет
- Boundary Representation and Description PDFДокумент7 страницBoundary Representation and Description PDFManoj KumarОценок пока нет
- Cooks Theorem: V.RadhesyamДокумент14 страницCooks Theorem: V.RadhesyamManohar DattОценок пока нет
- Data Link LayerДокумент17 страницData Link LayerArunОценок пока нет
- Morpheme Based Myanmar Word SegmenterДокумент4 страницыMorpheme Based Myanmar Word SegmenterEditor IJTSRDОценок пока нет
- Computer NetworksДокумент133 страницыComputer NetworksAnusha MeenakshiОценок пока нет
- Cloud Computing Unit-I JNTUH R16Документ31 страницаCloud Computing Unit-I JNTUH R16vizierОценок пока нет
- Reflexology ManualДокумент13 страницReflexology ManualPranesh100% (1)
- DiwaliДокумент1 страницаDiwaliArpit KhareОценок пока нет
- SyllabusДокумент45 страницSyllabusArpit KhareОценок пока нет
- Project SyopsisДокумент1 страницаProject SyopsisArpit KhareОценок пока нет
- AccentureДокумент3 страницыAccenturexaskoikingОценок пока нет
- Paper 1Документ2 страницыPaper 1Arpit KhareОценок пока нет
- Paper 1Документ2 страницыPaper 1Arpit KhareОценок пока нет
- Assessment Task 1: Written Questions: BSB50420Diploma of Leadership and ManagementДокумент5 страницAssessment Task 1: Written Questions: BSB50420Diploma of Leadership and Managementkarma Sherpa100% (1)
- Competency-Based Curriculum (CBC) : Provincial Training Center - SamboanДокумент8 страницCompetency-Based Curriculum (CBC) : Provincial Training Center - SamboanMa Joan Aguilar RodriguezОценок пока нет
- Automotive Servicing NC II CGДокумент36 страницAutomotive Servicing NC II CGChristine Grace Espallardo JungcoОценок пока нет
- Improving Students MemoryДокумент66 страницImproving Students MemoryDarshitSejparaОценок пока нет
- Greek Modern EducationДокумент10 страницGreek Modern EducationJolly D.PuertosОценок пока нет
- 1.DETAILED LESSON PLAN in English 3 Q1Документ3 страницы1.DETAILED LESSON PLAN in English 3 Q1Leslie Peritos100% (1)
- SGC Governance Council Action PlanДокумент5 страницSGC Governance Council Action PlanMAILYN PREMARIONОценок пока нет
- Up00102 French Languange Level 1Документ8 страницUp00102 French Languange Level 1Sh ShaezaОценок пока нет
- ImpressionДокумент1 страницаImpressionHEAVENLY KRIS AMOR DUMAYAOОценок пока нет
- Mengenali Fungsi Logika "And" Melalui Pemrograman Perceptron Dengan MatlabДокумент8 страницMengenali Fungsi Logika "And" Melalui Pemrograman Perceptron Dengan MatlabGeofanggaОценок пока нет
- Criteria and Types of Tests SMДокумент8 страницCriteria and Types of Tests SMSlavica Miranovic100% (1)
- Three Language Formula: by Prof M BasannaДокумент4 страницыThree Language Formula: by Prof M Basannaembi76Оценок пока нет
- School Reading Program 2022-23Документ2 страницыSchool Reading Program 2022-23charry ruayaОценок пока нет
- Train The Trainer - From Teacher To TrainerДокумент1 страницаTrain The Trainer - From Teacher To TrainerRoss Thorburn100% (1)
- (2001) Forlin - Inclusion. Identifying Potential Stressors For Regular Class TeachersДокумент13 страниц(2001) Forlin - Inclusion. Identifying Potential Stressors For Regular Class TeachersVarda ElentariОценок пока нет
- Musanif - Case Analysis Essay No Read, No Write - Story of Mang DeolitoДокумент2 страницыMusanif - Case Analysis Essay No Read, No Write - Story of Mang DeolitoAzaim MusanifОценок пока нет
- Task 2 Writting - Maira Alejandra AvilaДокумент15 страницTask 2 Writting - Maira Alejandra AvilaMaira Alejandra100% (1)
- 1st Quarter Week 1 Day 2-4 Illustrating Quadratic EquationДокумент3 страницы1st Quarter Week 1 Day 2-4 Illustrating Quadratic EquationMarina MandapatОценок пока нет
- Gala National High School: Classroom Observation PlanДокумент6 страницGala National High School: Classroom Observation PlanRizia RagmacОценок пока нет
- Digital Media Lesson PlanДокумент3 страницыDigital Media Lesson Planapi-347484576Оценок пока нет
- CSM and Related LiteratureДокумент22 страницыCSM and Related Literaturejhen bautistaОценок пока нет
- Funa, Jhon Menard M. - fs2 - LE1Документ10 страницFuna, Jhon Menard M. - fs2 - LE1Jhon M FunaОценок пока нет
- Epsy 2130 Fall 2015 SyllabusДокумент5 страницEpsy 2130 Fall 2015 Syllabusapi-283935863Оценок пока нет
- Types of ReadingДокумент19 страницTypes of ReadingNursyazwani HamdanОценок пока нет
- Miss. Carew's Grade 9 Class News Letter: Inclusion For All Involvement and UnderstandingДокумент4 страницыMiss. Carew's Grade 9 Class News Letter: Inclusion For All Involvement and Understandingapi-340851515Оценок пока нет
- Logical Connectors DLL 7Документ7 страницLogical Connectors DLL 7Vevencio BiabeОценок пока нет
- Lesson Plan Unit 5 - ReadingДокумент3 страницыLesson Plan Unit 5 - ReadingChánh Nguyễn Hoàng TrungОценок пока нет