Вам также может понравиться
- Test Report: External Device Server UDS1100Документ102 страницыTest Report: External Device Server UDS1100Arith KrishnanandanОценок пока нет
- BS en 50086-2-3 - 2002 PDFДокумент14 страницBS en 50086-2-3 - 2002 PDFDebreteni Florin100% (2)
- Road Vehicles - Diagnostic Systems - Keyword Protocol 2000 - Part 4: Requirements For Emission Related SystemsДокумент8 страницRoad Vehicles - Diagnostic Systems - Keyword Protocol 2000 - Part 4: Requirements For Emission Related SystemsrasoolfarajiОценок пока нет
- Scaaa 9 R 2Документ35 страницScaaa 9 R 2Tarig Mohamed KhearОценок пока нет
- UL 60730 1 Rev 5 21 2014 and 8 3 2016 ED 10 19 2018Документ12 страницUL 60730 1 Rev 5 21 2014 and 8 3 2016 ED 10 19 2018sharilОценок пока нет
- Semiconductor Convertors - General Requirements and Line Commutated ConvertorsДокумент16 страницSemiconductor Convertors - General Requirements and Line Commutated ConvertorsShahinAsadifardОценок пока нет
- EN-62561-1 2011 AA 2012 Vot1eДокумент6 страницEN-62561-1 2011 AA 2012 Vot1epemanr1914Оценок пока нет
- 11 2009Документ24 страницы11 2009thawatchai11222512100% (1)
- 14 729e INFДокумент6 страниц14 729e INFpabloОценок пока нет
- EDS 05-0001 - 132kV Grid and Primary System Protection and Control SchemesДокумент19 страницEDS 05-0001 - 132kV Grid and Primary System Protection and Control SchemesVishwas KaleОценок пока нет
- Iso 14230 1 1999Документ9 страницIso 14230 1 1999Amine GRADAОценок пока нет
- En 50397-2 PDFДокумент43 страницыEn 50397-2 PDFJCuchapin100% (1)
- BS en 61557-12-2008Документ82 страницыBS en 61557-12-2008Linh TruongОценок пока нет
- Draft European Standard PrEN 50561-3Документ12 страницDraft European Standard PrEN 50561-3Matthew HughesОценок пока нет
- DNVGL CP 0404Документ12 страницDNVGL CP 0404susmit.walavalkarОценок пока нет
- ML11241A211 - Emergency Diesel Generator Engine Monitoring Program (EDGEMP)Документ18 страницML11241A211 - Emergency Diesel Generator Engine Monitoring Program (EDGEMP)EnformableОценок пока нет
- 1issue7Документ4 страницы1issue7Cociorva DanОценок пока нет
- 14 Samss 531Документ23 страницы14 Samss 531Akash Verma0% (1)
- EVS HD 629 1 S2 2006 en PreviewДокумент7 страницEVS HD 629 1 S2 2006 en PreviewSandra Milena Arias BetancourthОценок пока нет
- 60617-12 1999Документ214 страниц60617-12 1999Ezrizal YusufОценок пока нет
- Norma Norsok Electrical SystemsДокумент29 страницNorma Norsok Electrical SystemsCesar LievanosОценок пока нет
- Communication Cables-Specification For Test MethodsДокумент54 страницыCommunication Cables-Specification For Test MethodsquycoctuОценок пока нет
- BD 62 07 As Built, Operational and Maintenance Records For Highway Structures (2007)Документ41 страницаBD 62 07 As Built, Operational and Maintenance Records For Highway Structures (2007)tpslaterОценок пока нет
- BS en 62290-1-2014Документ34 страницыBS en 62290-1-2014zanretsuОценок пока нет
- Guidance Note 3 (4th Edition) Errata and Update SheetДокумент3 страницыGuidance Note 3 (4th Edition) Errata and Update SheetBitlog LondonОценок пока нет
- BS en 61557-6-2007Документ16 страницBS en 61557-6-2007Linh TruongОценок пока нет
- Railway & Tunnel GuideДокумент11 страницRailway & Tunnel GuideEvon ChayОценок пока нет
- 12 2008Документ82 страницы12 2008thawatchai11222512100% (1)
- En 12266-2Документ13 страницEn 12266-2yashif ali100% (1)
- Class Notation Abstract and Comparison for DP SystemsДокумент76 страницClass Notation Abstract and Comparison for DP SystemsChief ChadОценок пока нет
- EN 61010-2-040 2005 enДокумент36 страницEN 61010-2-040 2005 enКуртимир ЕкатериновОценок пока нет
- BS en 61557-11-2009 PDFДокумент24 страницыBS en 61557-11-2009 PDFLinh Truong100% (2)
- BS 12271-3 Rate of Spread For SealsДокумент8 страницBS 12271-3 Rate of Spread For SealsBindhya RenjithОценок пока нет
- Part 8: Electrical Verification Requirements For New or Altered Roadside InstallationsДокумент13 страницPart 8: Electrical Verification Requirements For New or Altered Roadside InstallationsTeddy HariyantoОценок пока нет
- Transmission Line ManualДокумент20 страницTransmission Line ManualSrinath Rao Bompalli100% (1)
- 9 2009Документ28 страниц9 2009thawatchai11222512100% (2)
- Iec61850 9-1Документ35 страницIec61850 9-1Felipe MonteroОценок пока нет
- En 12966 Factory Production ControlДокумент21 страницаEn 12966 Factory Production Controlensentis100% (3)
- FL - Switchboards-Guide Specification2Документ23 страницыFL - Switchboards-Guide Specification2Shafeek GhreebОценок пока нет
- En 50483-1Документ18 страницEn 50483-1Raj Prasanth100% (1)
- BS 88-2.1 1988 - Low-Voltage FusesДокумент12 страницBS 88-2.1 1988 - Low-Voltage Fusesravibraju100% (1)
- European Standard Norme Européenne Europäische NormДокумент17 страницEuropean Standard Norme Européenne Europäische NormTyler KirbyОценок пока нет
- BS IEC 61865 2001 Calculation of The Electrical Components of Distance Between Live Parts and ObstaclesДокумент26 страницBS IEC 61865 2001 Calculation of The Electrical Components of Distance Between Live Parts and ObstaclesAlexis Fernandez Cordova100% (2)
- ETS-0067 Rev 0 Accessories For Underground AC CablesДокумент9 страницETS-0067 Rev 0 Accessories For Underground AC CablestdropulicОценок пока нет
- Sist en 50123 1 2003Документ13 страницSist en 50123 1 2003eng.ahmedhassan200Оценок пока нет
- Aec Q101-004Документ7 страницAec Q101-004mathurashwaniОценок пока нет
- En60598 2 13Документ14 страницEn60598 2 13Zhenhua Gao100% (1)
- prEN 15217Документ25 страницprEN 15217Joao GinjaОценок пока нет
- NORSOK Standard U-001r2Документ10 страницNORSOK Standard U-001r2Eileen WongОценок пока нет
- Ul 1261 BulletinДокумент14 страницUl 1261 BulletinMboriko MwashaОценок пока нет
- Bsen25817 PDFДокумент18 страницBsen25817 PDFdzat_sudrazat0% (1)
- 60617-10 1996Документ66 страниц60617-10 1996don_jopoОценок пока нет
- 62290-1 (2006 en BS) Urban Rail Control CommandДокумент32 страницы62290-1 (2006 en BS) Urban Rail Control Commanderesag3519Оценок пока нет
- Instrumentation - Liquid Level: MAY 1994 Page 1 of 8Документ8 страницInstrumentation - Liquid Level: MAY 1994 Page 1 of 8Jhonny Rafael Blanco CauraОценок пока нет
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsОт EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)От EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Рейтинг: 4 из 5 звезд4/5 (2)
- Regulatory Oversight of Ageing Management and Long Term Operation Programme of Nuclear Power PlantsОт EverandRegulatory Oversight of Ageing Management and Long Term Operation Programme of Nuclear Power PlantsОценок пока нет
- Design of Buildings for Wind: A Guide for ASCE 7-10 Standard Users and Designers of Special StructuresОт EverandDesign of Buildings for Wind: A Guide for ASCE 7-10 Standard Users and Designers of Special StructuresРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Design of Transient Protection Systems: Including Supercapacitor Based Design Approaches for Surge ProtectorsОт EverandDesign of Transient Protection Systems: Including Supercapacitor Based Design Approaches for Surge ProtectorsОценок пока нет
- Board Level Power Semiconductor Heat Sinks: 677 Series 680 SeriesДокумент1 страницаBoard Level Power Semiconductor Heat Sinks: 677 Series 680 SeriesJNarigonОценок пока нет
- Extruded Heat SinksДокумент7 страницExtruded Heat SinksCsar ChillánОценок пока нет
- en Performance Comparison of Usart CommunicДокумент9 страницen Performance Comparison of Usart CommunicyuivfrОценок пока нет
- OMA TS LightweightM2M V1!0!20170208 AДокумент138 страницOMA TS LightweightM2M V1!0!20170208 AJNarigonОценок пока нет
- Performance Evaluation of Gan and Si Based Driver Circuits For A Sic Mosfet Power SwitchДокумент12 страницPerformance Evaluation of Gan and Si Based Driver Circuits For A Sic Mosfet Power SwitchJNarigonОценок пока нет
- Endeavor - 20210519 - Nexperia - Understanding and Solving Thermal Design Issues in MOSFET ApplicationДокумент8 страницEndeavor - 20210519 - Nexperia - Understanding and Solving Thermal Design Issues in MOSFET ApplicationJNarigonОценок пока нет
- Testing Frameworks ComparisonДокумент37 страницTesting Frameworks ComparisonManjunath NPОценок пока нет
- CplusplusДокумент897 страницCplusplusEmreKovancıОценок пока нет
- nRF52811 Product BriefДокумент2 страницыnRF52811 Product BriefJNarigonОценок пока нет
- Non-Isolated, Triac Dimmable PFC Led Driver For 120vac, Up To 10W LedsДокумент21 страницаNon-Isolated, Triac Dimmable PFC Led Driver For 120vac, Up To 10W LedsJNarigonОценок пока нет
- OMA TS LightweightM2M V1!0!20170208 AДокумент138 страницOMA TS LightweightM2M V1!0!20170208 AJNarigonОценок пока нет
- Google Protocol Buffers For Embedded Iot: Integration in A Medical Device ProjectДокумент32 страницыGoogle Protocol Buffers For Embedded Iot: Integration in A Medical Device ProjectNhân Nhậu NhẹtОценок пока нет
- LE2022 May 16 TДокумент1 страницаLE2022 May 16 TJNarigonОценок пока нет
- Coap Spec PDFДокумент112 страницCoap Spec PDFSOMNATH KHAMARUОценок пока нет
- MPLAB IPE User's GuideДокумент38 страницMPLAB IPE User's GuidevandocardosoОценок пока нет
- BackspacedeleteДокумент14 страницBackspacedeletea.gОценок пока нет
- TN008 PCB Design Guidelines For 2x2 LGA Accelerometers PDFДокумент9 страницTN008 PCB Design Guidelines For 2x2 LGA Accelerometers PDFJNarigonОценок пока нет
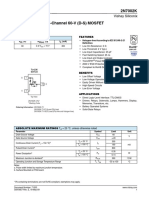
- 2n7002k Sot-23 VishayДокумент9 страниц2n7002k Sot-23 VishayKST5Оценок пока нет
- s000643 PDFДокумент122 страницыs000643 PDFJNarigonОценок пока нет
- Intrinsic Safety Circuit DesignДокумент19 страницIntrinsic Safety Circuit DesignMoralba SeijasОценок пока нет
- His Api Io LibДокумент23 страницыHis Api Io LibJNarigonОценок пока нет
- GOST R IEC 60079-25-2012 Intrinsically Safe SystemsДокумент61 страницаGOST R IEC 60079-25-2012 Intrinsically Safe SystemsJNarigonОценок пока нет
- Real-Time Performance of Dynamic Memory Allocation AlgorithmsДокумент10 страницReal-Time Performance of Dynamic Memory Allocation AlgorithmsJNarigonОценок пока нет
- s000643 PDFДокумент122 страницыs000643 PDFJNarigonОценок пока нет
- Sensirion Humidity Sensors SHT3x Datasheet AnalogДокумент13 страницSensirion Humidity Sensors SHT3x Datasheet AnalogJNarigonОценок пока нет
- PTC ThermistorsДокумент16 страницPTC ThermistorsJNarigonОценок пока нет
- Open BlockДокумент91 страницаOpen BlockJNarigonОценок пока нет
- Mosfet - Dissipating 1W On A To-220 Without Heatsink - Electrical Engineering Stack ExchangeДокумент5 страницMosfet - Dissipating 1W On A To-220 Without Heatsink - Electrical Engineering Stack ExchangeJNarigonОценок пока нет
- 0ZCH Nov2016Документ4 страницы0ZCH Nov2016JNarigonОценок пока нет
- TN008 PCB Design Guidelines For 2x2 LGA Accelerometers PDFДокумент9 страницTN008 PCB Design Guidelines For 2x2 LGA Accelerometers PDFJNarigonОценок пока нет
- Opamp PDFДокумент15 страницOpamp PDFBhumika PoriyaОценок пока нет
- Infineon-1EDIXXI12AF-DS-v02 - 00-EN - Gate DriveДокумент22 страницыInfineon-1EDIXXI12AF-DS-v02 - 00-EN - Gate DriveNeelima KumariОценок пока нет
- Dahua Hcvr4104hs-s3 en DatasheetДокумент3 страницыDahua Hcvr4104hs-s3 en DatasheetDefinal ChaniagoОценок пока нет
- VSD School NotesДокумент22 страницыVSD School Notesjuan TorresОценок пока нет
- BX Data SheetДокумент6 страницBX Data SheetbinkyfishОценок пока нет
- Miqen Users Manual Ver 1.01Документ60 страницMiqen Users Manual Ver 1.01Mustafa Kadir Yılmazer100% (1)
- MPE Calculation 1761429Документ3 страницыMPE Calculation 1761429jjmazueraОценок пока нет
- 7367v1 0 (G52-73671X1) PDFДокумент95 страниц7367v1 0 (G52-73671X1) PDFErnesto GodoyОценок пока нет
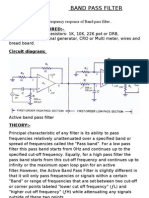
- Design and Study Active Band Pass FilterДокумент3 страницыDesign and Study Active Band Pass FilterShruti MathurОценок пока нет
- Datasheet+of+DS D2055LE G++LCD+Display 20201231Документ4 страницыDatasheet+of+DS D2055LE G++LCD+Display 20201231Edgard Díaz LeighОценок пока нет
- Wireless Charging of Mobile Phones Using RectennaДокумент12 страницWireless Charging of Mobile Phones Using RectennaPriya Ammu67% (3)
- Utc17821 YouwangelectronicsДокумент5 страницUtc17821 YouwangelectronicsJonny Cristhian Otero BacaОценок пока нет
- SCR Lab Report Characteristics StudyДокумент6 страницSCR Lab Report Characteristics StudyManzur ProkorshoОценок пока нет
- Tecnica 100-140Документ12 страницTecnica 100-140Georgel PalОценок пока нет
- CS609 Solved MCQ mega collection by Arslan Ali and ZeeshanДокумент17 страницCS609 Solved MCQ mega collection by Arslan Ali and ZeeshanMansab Sabir0% (2)
- CMOS Analog IC Design - Fundamentals PDFДокумент371 страницаCMOS Analog IC Design - Fundamentals PDFwicked_not_meОценок пока нет
- 2013 - SPIE - A CMOS-compatible Silicon Photonic Platform For High-Speed Integrated Opto-ElectronicsДокумент8 страниц2013 - SPIE - A CMOS-compatible Silicon Photonic Platform For High-Speed Integrated Opto-ElectronicsReza BaghdadiОценок пока нет
- Samsung eMMC DatasheetДокумент25 страницSamsung eMMC DatasheetMạnh Hà100% (1)
- Interface Module Adapter S7 300, S7 400, S7 1500Документ23 страницыInterface Module Adapter S7 300, S7 400, S7 1500SyariefОценок пока нет
- Techtopics No. 125Документ2 страницыTechtopics No. 125paijo klimpritОценок пока нет
- Bin mapping configurationДокумент40 страницBin mapping configurationamruthkiranbabujiОценок пока нет
- E-Viscous Fan Circuit Diagram20.15 - E694Документ6 страницE-Viscous Fan Circuit Diagram20.15 - E694Varun Korivi100% (1)
- US 6,289,319 Claim Chart - PatrollДокумент4 страницыUS 6,289,319 Claim Chart - PatrollAnonymous qyExl9dUQuОценок пока нет
- Power Stage Designer™: User's GuideДокумент29 страницPower Stage Designer™: User's GuideChiến TrầnОценок пока нет
- Sirio SY 27-4 PDFДокумент4 страницыSirio SY 27-4 PDFAriel BecerraОценок пока нет
- E1065E1065M-14 Práctica Estándar para Evaluar Las Características de Las Unidades de Búsqueda Ultrasónica1Документ23 страницыE1065E1065M-14 Práctica Estándar para Evaluar Las Características de Las Unidades de Búsqueda Ultrasónica1fredy lopezОценок пока нет
- W1-L1 Ntroduction Power ElectronicsДокумент46 страницW1-L1 Ntroduction Power ElectronicsxDavidx :VОценок пока нет
- Conference-201410-Shahzad-LLC Series Resonant Converter With PID Controller For Battery Charging ApplicationДокумент6 страницConference-201410-Shahzad-LLC Series Resonant Converter With PID Controller For Battery Charging ApplicationTocean DuongОценок пока нет
- Elec4602 NotesДокумент34 страницыElec4602 NotesDavid VangОценок пока нет
- Inverting Amplifier:: To Study The Following Op-Amp CircuitsДокумент11 страницInverting Amplifier:: To Study The Following Op-Amp CircuitsUMESH RAJ25Оценок пока нет