Вам также может понравиться
- 6 - Dynamics of A System of Particles 6.1 Centre of MassДокумент0 страниц6 - Dynamics of A System of Particles 6.1 Centre of MassVamsi VangaraОценок пока нет
- 06 - Dynamics of A System of ParticlesДокумент3 страницы06 - Dynamics of A System of Particlespoorv1235570Оценок пока нет
- COM, Collisions MasterДокумент72 страницыCOM, Collisions MasterRaghuram Seshabhattar67% (3)
- Centre of Mass PDFДокумент5 страницCentre of Mass PDFRanjan PrasadОценок пока нет
- Rotation Theory IДокумент6 страницRotation Theory IMohammed Aftab AhmedОценок пока нет
- Centre of MassДокумент12 страницCentre of MassanirudtОценок пока нет
- Lesson11 12studysheet 2Документ2 страницыLesson11 12studysheet 2Henry HОценок пока нет
- Centre OF Mass: Points To RememberДокумент14 страницCentre OF Mass: Points To RememberReddyvari VenugopalОценок пока нет
- Center of MassДокумент2 страницыCenter of MassAnonymous 9uu04elОценок пока нет
- Module 7: Centre of Mass: DefinitionДокумент10 страницModule 7: Centre of Mass: Definitionapi-3766872Оценок пока нет
- CH 7, Session 1-4Документ7 страницCH 7, Session 1-4Suyash RoyОценок пока нет
- Centre of Mass of Two Particle and N Particle SystemДокумент5 страницCentre of Mass of Two Particle and N Particle Systemimrran32475% (4)
- Centre of MassДокумент2 страницыCentre of MassExpertsmindEduОценок пока нет
- CH 10Документ58 страницCH 10Muhammad Tayyab MadniОценок пока нет
- Centre of Mass-Jee (Main)Документ60 страницCentre of Mass-Jee (Main)Resonance Dlpd85% (84)
- Centre of Mass: SynopsisДокумент4 страницыCentre of Mass: SynopsisWillSmithОценок пока нет
- Chapter 8 - Center of Mass and Linear MomentumДокумент21 страницаChapter 8 - Center of Mass and Linear MomentumAnagha GhoshОценок пока нет
- Physics 303/573 Systems With More Than One Particle: 1 Center of MassДокумент6 страницPhysics 303/573 Systems With More Than One Particle: 1 Center of MassJLОценок пока нет
- Centre of Mass: Mass Moment: It Is Defined As The Product of Mass of The Particle andДокумент67 страницCentre of Mass: Mass Moment: It Is Defined As The Product of Mass of The Particle andAditya RaiОценок пока нет
- System of Particles and Rotational MotionДокумент23 страницыSystem of Particles and Rotational MotionVIR MEHERОценок пока нет
- Center of MassДокумент4 страницыCenter of MassWYVILLE MAGASTINOОценок пока нет
- Dynamic Rigid BodiesДокумент50 страницDynamic Rigid Bodiesamul_kambleОценок пока нет
- Tugas Pengganti UTS KelompokДокумент10 страницTugas Pengganti UTS KelompokCem PakaОценок пока нет
- The Centre of Mass: MX X M My y M MZ Z MДокумент24 страницыThe Centre of Mass: MX X M My y M MZ Z MVijendra ChauhanОценок пока нет
- Centre of Mass Conservation of MomentumДокумент36 страницCentre of Mass Conservation of MomentumVikas Bhandari100% (1)
- Lecture Notes For Physical Chemistry II Quantum Theory and SpectroscoptyДокумент41 страницаLecture Notes For Physical Chemistry II Quantum Theory and Spectroscopty3334333Оценок пока нет
- Problem Set 8 SolutionsДокумент8 страницProblem Set 8 SolutionssagarnitishpirtheeОценок пока нет
- Derivation For The Moment of Inertia of A Hollow CylinderДокумент6 страницDerivation For The Moment of Inertia of A Hollow CylinderJason HaОценок пока нет
- Physics Formulas and ConceptsДокумент23 страницыPhysics Formulas and Conceptschand7790Оценок пока нет
- PHY - 214-Rigid Body DynamicsДокумент14 страницPHY - 214-Rigid Body DynamicsAbdulganeey Horlarmilekan MuheezОценок пока нет
- Systems of Particles: Physics 53Документ8 страницSystems of Particles: Physics 53Okan ÜlgenОценок пока нет
- Classical Mechanics-Pdf by Dr. Rajesh MathpalДокумент45 страницClassical Mechanics-Pdf by Dr. Rajesh MathpalMunna MunendharОценок пока нет
- PHY 1 Mod-06 (Centre of Mass)Документ10 страницPHY 1 Mod-06 (Centre of Mass)Shamim ImtiazОценок пока нет
- HSSRPTR - Plus One Chapter7Документ24 страницыHSSRPTR - Plus One Chapter7SPARTAОценок пока нет
- Notes On Mechanical Vibrations: 1 Masses and Springs-The Linear OscillatorДокумент10 страницNotes On Mechanical Vibrations: 1 Masses and Springs-The Linear Oscillatoramlandas08Оценок пока нет
- Supporting Lecturer: Dr. Sc. Syahril, S.Si, MT Mid Test English Physics Rotational MotionДокумент20 страницSupporting Lecturer: Dr. Sc. Syahril, S.Si, MT Mid Test English Physics Rotational MotionAgt Rafi'ul MuzackyОценок пока нет
- Physics Central Force PDFДокумент19 страницPhysics Central Force PDFsushant mishraОценок пока нет
- CHPT 07Документ14 страницCHPT 07sambarta.sanyalОценок пока нет
- Rotational MotionДокумент41 страницаRotational MotionGrandmaОценок пока нет
- Central Force Motion: PH303/MECHANICS2/NOTE03/05.08.2009Документ5 страницCentral Force Motion: PH303/MECHANICS2/NOTE03/05.08.2009nhc2009Оценок пока нет
- Physics Formulas and ConceptsДокумент23 страницыPhysics Formulas and ConceptsShivam TiwariОценок пока нет
- MSPRДокумент20 страницMSPRParakram Singh ShekhawatОценок пока нет
- Chap 9Документ6 страницChap 9Aswin BalasubramaniamОценок пока нет
- Momentum: Nirmaan Shanker October 2015Документ7 страницMomentum: Nirmaan Shanker October 2015Nirmaan ShankerОценок пока нет
- CH 10Документ9 страницCH 10ArdvarkОценок пока нет
- Angular MomentumДокумент6 страницAngular Momentumprakush_prakushОценок пока нет
- Center of Mass.Документ130 страницCenter of Mass.TammanurRavi100% (1)
- Feynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsОт EverandFeynman Lectures Simplified 1B: Harmonic Oscillators, & ThermodynamicsОценок пока нет
- Full Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?От EverandFull Free Motion of Celestial Bodies Around a Central Mass - Why Do They Mostly Orbit in the Equatorial Plane?Оценок пока нет
- General Relativity 3: Astrophysics with Tensor CalculusОт EverandGeneral Relativity 3: Astrophysics with Tensor CalculusРейтинг: 5 из 5 звезд5/5 (4)
- Strong Rigidity of Locally Symmetric Spaces. (AM-78), Volume 78От EverandStrong Rigidity of Locally Symmetric Spaces. (AM-78), Volume 78Оценок пока нет
- Solid State1Документ12 страницSolid State1Ayush YadavОценок пока нет
- Alternating CurrentДокумент4 страницыAlternating CurrentAyush YadavОценок пока нет
- D F Block ElementsДокумент17 страницD F Block ElementshoneyОценок пока нет
- Chemical Kinetics IIДокумент9 страницChemical Kinetics IIAyush YadavОценок пока нет
- AIIMS Sample Question PapersДокумент48 страницAIIMS Sample Question PapersAyush YadavОценок пока нет
- BITSAT Sample Question PapersДокумент34 страницыBITSAT Sample Question PapersAyush YadavОценок пока нет
- Unit I Mathematical Tools 1.1 Basic Mathematics For Physics: I. Quadratic Equation and Its SolutionДокумент16 страницUnit I Mathematical Tools 1.1 Basic Mathematics For Physics: I. Quadratic Equation and Its SolutionJit AggОценок пока нет
- 61 Binomial Theorem Part 2 of 2Документ5 страниц61 Binomial Theorem Part 2 of 2abuabhilashОценок пока нет
- 61 Binomial Theorem Part 2 of 2Документ5 страниц61 Binomial Theorem Part 2 of 2abuabhilashОценок пока нет
- JEE Main 2016 Last 3 Months Stud Planner MathematicsДокумент1 страницаJEE Main 2016 Last 3 Months Stud Planner MathematicsNinderОценок пока нет
- Deepawali Assngment Class 11 QuestionsДокумент16 страницDeepawali Assngment Class 11 Questionskushwah_770145566Оценок пока нет
- 43stack 2x2Документ11 страниц43stack 2x2Ayush YadavОценок пока нет
- English 100 Error Detection & Correction For All Exams by Das Sir (09038870684)Документ19 страницEnglish 100 Error Detection & Correction For All Exams by Das Sir (09038870684)Vijay Vikram Singh100% (1)
- Index: This File Contains Trigonometry (Collection # 2)Документ5 страницIndex: This File Contains Trigonometry (Collection # 2)choppersureОценок пока нет
- CD KeyДокумент1 страницаCD KeyAyush YadavОценок пока нет
- LCNCДокумент1 страницаLCNCAyush YadavОценок пока нет
- New QQДокумент3 страницыNew QQAyush YadavОценок пока нет
- Log FileДокумент1 страницаLog FileAyush YadavОценок пока нет
- Book PassДокумент1 страницаBook PassAyush YadavОценок пока нет
- Eva Rolita Harianja (Centripetal Force)Документ3 страницыEva Rolita Harianja (Centripetal Force)Eva Rolita HarianjaОценок пока нет
- GR 12 Term 2 2018 Ps Practial Booklet BДокумент14 страницGR 12 Term 2 2018 Ps Practial Booklet Bmoodleyclaryce345Оценок пока нет
- Nur Wahyu SudiariniДокумент4 страницыNur Wahyu SudiariniNaura FitriОценок пока нет
- Factors Affecting Acceleration2Документ17 страницFactors Affecting Acceleration2Sara FaggalОценок пока нет
- Elementsofstatic00loneuoft 2Документ326 страницElementsofstatic00loneuoft 2AakashParanОценок пока нет
- Fluid Problem SetДокумент4 страницыFluid Problem SetJupissa Espinosa100% (1)
- Module Checklist - Mechanics - Grade 12Документ7 страницModule Checklist - Mechanics - Grade 12api-257324866Оценок пока нет
- Eng 0202 Force StudДокумент136 страницEng 0202 Force StudSally ThamОценок пока нет
- GENPHYSLAB Guide QuestionsДокумент5 страницGENPHYSLAB Guide QuestionskhyleraekavillorenteОценок пока нет
- Wheat Fields Public School Ghudda, Bathinda S.A 1, Xi - PhysicsДокумент2 страницыWheat Fields Public School Ghudda, Bathinda S.A 1, Xi - PhysicsGurvinder SinghОценок пока нет
- EN200 Naval Engineering Chapter 1 PDFДокумент33 страницыEN200 Naval Engineering Chapter 1 PDFanusha_wiproОценок пока нет
- RPT Form 4 Physics 2022Документ30 страницRPT Form 4 Physics 2022NoorОценок пока нет
- A Coulombs Law Electric Field IntensityДокумент36 страницA Coulombs Law Electric Field IntensityShaker HusienОценок пока нет
- Leap TestДокумент9 страницLeap TestChristian DeanОценок пока нет
- Potential and Capacitance ClickerДокумент41 страницаPotential and Capacitance ClickerFernando AndradeОценок пока нет
- 2 - 3 Force Mass AccelerationДокумент15 страниц2 - 3 Force Mass Accelerationanton082117Оценок пока нет
- Nutritional Status ReportДокумент1 страницаNutritional Status ReportEL JEAH MOSQUEDAОценок пока нет
- Midterm Exam SolutionsДокумент7 страницMidterm Exam SolutionsJonathan RussellОценок пока нет
- Physics 71 ReviewerДокумент33 страницыPhysics 71 ReviewerMarc Justin VergaraОценок пока нет
- Operating Instruction Platform Scale: Kern deДокумент37 страницOperating Instruction Platform Scale: Kern dedexterpoliОценок пока нет
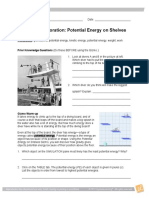
- Student Exploration: Potential Energy On ShelvesДокумент4 страницыStudent Exploration: Potential Energy On ShelvesShahad AlhosaniОценок пока нет
- Coffee Filter Lab IntroДокумент5 страницCoffee Filter Lab IntroThomas LauОценок пока нет
- Mass Balance Benno Rahardyan2Документ40 страницMass Balance Benno Rahardyan2rusdi100% (1)
- Simple Pendulum: ProblemsДокумент6 страницSimple Pendulum: ProblemsadsadasdasdasdОценок пока нет
- Motion 4 QPДокумент10 страницMotion 4 QPAlfi KhanОценок пока нет
- Mechanics Experiment 2Документ14 страницMechanics Experiment 2Sydney NtokozoОценок пока нет
- Centripetal ForceДокумент8 страницCentripetal ForceShukor AzОценок пока нет
- Enum Types JavaДокумент3 страницыEnum Types JavaAmandeep PuniaОценок пока нет
- Basic Physics FormulaДокумент2 страницыBasic Physics FormulaAdamu Ahmad100% (1)