Вам также может понравиться
- I. Introduction To RheologyДокумент27 страницI. Introduction To RheologyMartin Ignacio Mendieta LoraОценок пока нет
- Conservation of MomentumДокумент5 страницConservation of Momentumytharth.sabharwal.1981Оценок пока нет
- (Paper) Simple Method To Predict Fire Resistance of Composite ColumnsДокумент12 страниц(Paper) Simple Method To Predict Fire Resistance of Composite ColumnsGregory SimmonОценок пока нет
- En Nastran FX-catalogДокумент28 страницEn Nastran FX-catalogmariostructural2010Оценок пока нет
- BD 90/05Документ25 страницBD 90/05ferasalkamОценок пока нет
- ContentДокумент16 страницContentSASHIN ServiSoftОценок пока нет
- Experiment No5 Column StabilityДокумент12 страницExperiment No5 Column StabilityRofanddi RahmadОценок пока нет
- Impacts of Cement Industry On Environment - An OverviewДокумент6 страницImpacts of Cement Industry On Environment - An OverviewAchmad Andeza PulunganОценок пока нет
- Regressions Matrix SolutionsДокумент22 страницыRegressions Matrix SolutionsRyan GuevaraОценок пока нет
- Environmental Accounting - A Case Study of Cement Sector in IndiaДокумент22 страницыEnvironmental Accounting - A Case Study of Cement Sector in Indiaishrat aliОценок пока нет
- Leca ConcreteДокумент11 страницLeca ConcretediartoОценок пока нет
- ITS Undergraduate 10225 BibliographyДокумент2 страницыITS Undergraduate 10225 BibliographySukmaОценок пока нет
- Civil2015 v11 Release NoteДокумент21 страницаCivil2015 v11 Release NoteAshish LoyaОценок пока нет
- Finite Element Method An Overview PDFДокумент8 страницFinite Element Method An Overview PDFMuller AsmareОценок пока нет
- Manual For Columns and Struts ApparatusДокумент3 страницыManual For Columns and Struts Apparatusramniwas123Оценок пока нет
- 3 - 19 Thermal Level SensorsДокумент3 страницы3 - 19 Thermal Level SensorsmuthoiОценок пока нет
- Experimental Investigation On Buckling Analysis of Hexagonal Castellated ColumnДокумент9 страницExperimental Investigation On Buckling Analysis of Hexagonal Castellated ColumnGogyОценок пока нет
- Rank CorrelationДокумент19 страницRank CorrelationRishab Jain 2027203Оценок пока нет
- Midas Pro2 PDFДокумент582 страницыMidas Pro2 PDFYana100% (1)
- Experimental Investigation On Concrete Filled Unplasticized Poly Vinyl Chloride (Upvc) TubesДокумент37 страницExperimental Investigation On Concrete Filled Unplasticized Poly Vinyl Chloride (Upvc) TubesSaranyaleoОценок пока нет
- Bachelor of Technology Degree Course Full Module Wise DescriptionДокумент138 страницBachelor of Technology Degree Course Full Module Wise DescriptionPappanОценок пока нет
- Shimadzu AutoTestingДокумент8 страницShimadzu AutoTestingewfsdОценок пока нет
- Structure Lab 3Документ9 страницStructure Lab 3DAus Sapar50% (2)
- 1-7 Least-Square RegressionДокумент23 страницы1-7 Least-Square RegressionRawash Omar100% (1)
- Numerical Analysis of A Reinforced Concrete Beam in Abaqus 6.10Документ118 страницNumerical Analysis of A Reinforced Concrete Beam in Abaqus 6.10Howo4DieОценок пока нет
- A 3D Constitutive Wood Model Using The Concepts of Continuum Damage MechanicsДокумент19 страницA 3D Constitutive Wood Model Using The Concepts of Continuum Damage MechanicsAnonymous 7MdZQn1Оценок пока нет
- Session-2 - Twin Metro Tunnel in Layered Soil (2D) - Apr - 22Документ15 страницSession-2 - Twin Metro Tunnel in Layered Soil (2D) - Apr - 22Dadi YashwantОценок пока нет
- LECAДокумент4 страницыLECAjurko5Оценок пока нет
- Seminar PDFДокумент18 страницSeminar PDFneetu kumariОценок пока нет
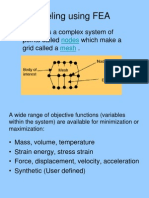
- Modeling Using FEA: FEA Uses A Complex System of Points Called Which Make A Grid Called AДокумент8 страницModeling Using FEA: FEA Uses A Complex System of Points Called Which Make A Grid Called AqamhОценок пока нет
- TSPSC Previouspapers Aee2015 Not8 15 Optional PDFДокумент16 страницTSPSC Previouspapers Aee2015 Not8 15 Optional PDFchetanОценок пока нет
- Abaqus - Nonlinear Analysis of Reinforced Concrete Beam Experimentation2015Документ5 страницAbaqus - Nonlinear Analysis of Reinforced Concrete Beam Experimentation2015oioОценок пока нет
- Strength of Concrete Structure Partial Replacement of Sand by Copper SlagДокумент6 страницStrength of Concrete Structure Partial Replacement of Sand by Copper SlagEditor IJTSRDОценок пока нет
- Behavior and Calculations of Concrete-Filled Double Skin Steel TubularДокумент10 страницBehavior and Calculations of Concrete-Filled Double Skin Steel Tubularatchzyt100% (1)
- Study On Prefabricated Concrete Beam and Column ConnectionsДокумент6 страницStudy On Prefabricated Concrete Beam and Column ConnectionsreenaОценок пока нет
- Composite Materials 2marksДокумент46 страницComposite Materials 2marksHemaprasanthОценок пока нет
- 10 陈启峰《Size Balanced Tree》Документ18 страниц10 陈启峰《Size Balanced Tree》yizer100% (2)
- Civil2015 v2 1 Release NoteДокумент30 страницCivil2015 v2 1 Release NoteJorge Luis Molluni BalconaОценок пока нет
- KK Bullet Constraints-Builder PDFДокумент7 страницKK Bullet Constraints-Builder PDFrigaschОценок пока нет
- ENT 286 Instrumentation & Measurement: Measurement of Solid Mechanical QuantitiesДокумент67 страницENT 286 Instrumentation & Measurement: Measurement of Solid Mechanical Quantitiesyccy1223Оценок пока нет
- The Simple Linear Regression Model and CorrelationДокумент64 страницыThe Simple Linear Regression Model and CorrelationRajesh DwivediОценок пока нет
- Plant Structure TutorialДокумент48 страницPlant Structure TutorialAmitabha DebОценок пока нет
- (77596992) Project DSTДокумент10 страниц(77596992) Project DSTanurag6866Оценок пока нет
- TN HTB CylindricalLensesДокумент8 страницTN HTB CylindricalLensesNina DjawaОценок пока нет
- Midas Civil Ver.7.4.0 Enhancements: Analysis & DesignДокумент19 страницMidas Civil Ver.7.4.0 Enhancements: Analysis & Designdia_blo_777Оценок пока нет
- Analysis and Simulation of Single Point Incremental Forming by ANSYSДокумент8 страницAnalysis and Simulation of Single Point Incremental Forming by ANSYSAnonymous PufNjg100% (1)
- XonGrid Interpolation Add-InДокумент5 страницXonGrid Interpolation Add-InSulei123Оценок пока нет
- Implementation Technology of Bubble Deck SlabДокумент3 страницыImplementation Technology of Bubble Deck SlabMohamad Fadhilatul AzrynОценок пока нет
- Ideathon 2023 - Contest GuidelinesДокумент11 страницIdeathon 2023 - Contest GuidelinesHemant KumarОценок пока нет
- ThesisДокумент127 страницThesisSri SaiОценок пока нет
- Modul Software MidasДокумент49 страницModul Software MidasiGedeASОценок пока нет
- Finite Element Method Prof. C.S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurДокумент27 страницFinite Element Method Prof. C.S. Upadhyay Department of Mechanical Engineering Indian Institute of Technology, KanpurabimanaОценок пока нет
- Technical Seminar Presentation HarishДокумент21 страницаTechnical Seminar Presentation Harishprashanth nОценок пока нет
- Earthquake EngineeringДокумент79 страницEarthquake EngineeringLuis MontoyaОценок пока нет
- ABAQUS Tutorial Example PresentationДокумент7 страницABAQUS Tutorial Example PresentationBhushanRajОценок пока нет
- Unit 1 PDFДокумент109 страницUnit 1 PDFrajath bhatОценок пока нет
- Suspension Test RigДокумент13 страницSuspension Test RigPoonam Mankar100% (1)
- Damping and Tracking Control Schemes For NanopositioningДокумент13 страницDamping and Tracking Control Schemes For NanopositioningmvcОценок пока нет
- LVDT - Working Principle Construction Types, Advantages and ApplicationsДокумент11 страницLVDT - Working Principle Construction Types, Advantages and ApplicationsKunal AhiwaleОценок пока нет
- What Is An LVDT (Linear Variable Differential Transformer) ?Документ3 страницыWhat Is An LVDT (Linear Variable Differential Transformer) ?muhammad aliОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Magnetostatics Lecture 1Документ12 страницMagnetostatics Lecture 1Chinmaya RathОценок пока нет
- Csa A23.3-04 RC-BM-001Документ7 страницCsa A23.3-04 RC-BM-001Khuất Trần ThanhОценок пока нет
- Chapter # 21 Nuclear PhysicsДокумент7 страницChapter # 21 Nuclear PhysicsAsif Rasheed RajputОценок пока нет
- Investigation On Electrical Transport and Dielectric Relaxation Mechanism in TbCrO3 Peroskite Orthochromite 2023 2Документ19 страницInvestigation On Electrical Transport and Dielectric Relaxation Mechanism in TbCrO3 Peroskite Orthochromite 2023 2Best WishesОценок пока нет
- Course Plan Mechanics 1 (BS Maths)Документ3 страницыCourse Plan Mechanics 1 (BS Maths)Ambreen KhanОценок пока нет
- The Operational Mechanism of Continuous Four-Roll Plate Bending ProcessДокумент4 страницыThe Operational Mechanism of Continuous Four-Roll Plate Bending ProcessBenjamin Neciosup PaucarОценок пока нет
- Knight Ch14Документ22 страницыKnight Ch14aaljuhani123Оценок пока нет
- Wave Force On Vertical WallsДокумент55 страницWave Force On Vertical WallsFares YaredОценок пока нет
- Ionization Energy Electron Affinity and Atomic RadiusДокумент25 страницIonization Energy Electron Affinity and Atomic RadiusMr. CrustОценок пока нет
- Soft Blue KuduДокумент10 страницSoft Blue KuduAditya PrakashОценок пока нет
- Chemistry Books: S.No Authors /publisher Name of Books RemarksДокумент13 страницChemistry Books: S.No Authors /publisher Name of Books RemarksAnonymous FckLmgFyОценок пока нет
- Chapter 1 Theory of MachinesДокумент21 страницаChapter 1 Theory of Machinesmunim matinОценок пока нет
- 1 - Introduction To Quantum ComputingДокумент34 страницы1 - Introduction To Quantum Computingmandeepsinghchhabra2214Оценок пока нет
- PHYSICS101Документ23 страницыPHYSICS101Renzo L. MagatОценок пока нет
- Shaft TorsionДокумент2 страницыShaft Torsionindra purnamaОценок пока нет
- HeatДокумент163 страницыHeatSrMoonSengChoo100% (1)
- L3-BEKG2433-Three Phase Part 2 PDFДокумент9 страницL3-BEKG2433-Three Phase Part 2 PDFVievie Le BluewberrietrufflesОценок пока нет
- Ancient Egyptian Wisdom - Magnetic EnergyДокумент21 страницаAncient Egyptian Wisdom - Magnetic Energyiza721100% (10)
- PsychrometryДокумент34 страницыPsychrometryC Venkataramana ReddyОценок пока нет
- Reflex KlystronДокумент24 страницыReflex KlystronHarshada Bansode100% (2)
- Wajac StandardДокумент22 страницыWajac StandardajayОценок пока нет
- Basic Concept of GeneratorsДокумент120 страницBasic Concept of GeneratorszakalyОценок пока нет
- Lecture Gauss LawДокумент5 страницLecture Gauss LawBill WhiteОценок пока нет
- Why Are Q and Q Used To Symbolize Heat?: Chemistry For EveryoneДокумент1 страницаWhy Are Q and Q Used To Symbolize Heat?: Chemistry For EveryoneEzephusОценок пока нет
- Homework03 Engineering Thermodynamics MENG 3320: CP a+bT+cT2+dT3Документ5 страницHomework03 Engineering Thermodynamics MENG 3320: CP a+bT+cT2+dT3Andrew AlarconОценок пока нет
- 1-1 Master Thesis MEng3 GCДокумент11 страниц1-1 Master Thesis MEng3 GCCabrel FankamОценок пока нет
- Miscellaneous Strength Topics: Castigliano's TheoremДокумент5 страницMiscellaneous Strength Topics: Castigliano's TheoremDeepak Chachra100% (1)
- 5.1 Overview of VibrationsДокумент56 страниц5.1 Overview of VibrationsAbhishek PandeyОценок пока нет
- FugacityДокумент20 страницFugacityFernando J. Correa DelgadoОценок пока нет