Вам также может понравиться
- Evaluacion 2 - AC - Deloitte-CyberAcademy - Paso A Paso Desafio 1Документ10 страницEvaluacion 2 - AC - Deloitte-CyberAcademy - Paso A Paso Desafio 1Daniel Eduardo Letelier MunozОценок пока нет
- Manual Practico de Microwind en EspañolДокумент71 страницаManual Practico de Microwind en Españoljhonatan_camacho_navarro100% (4)
- Mantenimiento industrialДокумент6 страницMantenimiento industrialMarilú Isabel Alarcón BerrocalОценок пока нет
- Redes PROFINET-ETHERNETДокумент25 страницRedes PROFINET-ETHERNETjhonatan_camacho_navarroОценок пока нет
- Clase - SeñalesДокумент31 страницаClase - Señalesjhonatan_camacho_navarroОценок пока нет
- P1 Grafica Senales ContinuasДокумент2 страницыP1 Grafica Senales Continuasjhonatan_camacho_navarroОценок пока нет
- Filtros Fir e IirДокумент7 страницFiltros Fir e Iirjhonatan_camacho_navarroОценок пока нет
- 2a. CLASE - SISTEMAS PDFДокумент49 страниц2a. CLASE - SISTEMAS PDFjhonatan_camacho_navarroОценок пока нет
- TALLER Rta SistemasMatlabДокумент11 страницTALLER Rta SistemasMatlabjhonatan_camacho_navarroОценок пока нет
- 2a. CLASE - SISTEMAS PDFДокумент49 страниц2a. CLASE - SISTEMAS PDFjhonatan_camacho_navarroОценок пока нет
- PrevioДокумент15 страницPreviojhonatan_camacho_navarroОценок пока нет
- TALLER Formas Representacion Matlab PDFДокумент10 страницTALLER Formas Representacion Matlab PDFjhonatan_camacho_navarroОценок пока нет
- Controlabilidad y ObservabilidadДокумент35 страницControlabilidad y Observabilidaddeaj8710100% (1)
- EjerciciosДокумент29 страницEjerciciosmdiazcastellanos100% (5)
- TALLER Rta SistemasMatlabДокумент11 страницTALLER Rta SistemasMatlabjhonatan_camacho_navarroОценок пока нет
- Paneles Power BiДокумент3 страницыPaneles Power BiLalo LaloteОценок пока нет
- TECNOLOGIA - GRADO NOVENO - GUIA No. 5 - REDES DE COMPUTADORAS - (Del 10 Al 28 de Mayo de 2021)Документ4 страницыTECNOLOGIA - GRADO NOVENO - GUIA No. 5 - REDES DE COMPUTADORAS - (Del 10 Al 28 de Mayo de 2021)Solemy CarreñoОценок пока нет
- Desarrollo WebДокумент2 страницыDesarrollo WebfredmarroОценок пока нет
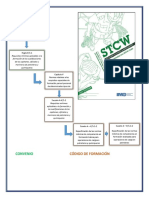
- Cuadro STCW 2Документ1 страницаCuadro STCW 2ferkmОценок пока нет
- Virtualización y Licenciamiento Taller 2Документ4 страницыVirtualización y Licenciamiento Taller 2Juan sebastian Florez SuarezОценок пока нет
- Práctica de Laboratorio 2524 Cómo Trabajar Con Python y SQLiteДокумент10 страницPráctica de Laboratorio 2524 Cómo Trabajar Con Python y SQLiteCARLOS ALONSOОценок пока нет
- GDP - Curso Ept PDFДокумент25 страницGDP - Curso Ept PDFDSOQUIОценок пока нет
- 06 Post-Instalación de WS2016Документ10 страниц06 Post-Instalación de WS2016Jose PiquerasОценок пока нет
- Proyecto Del Curso Segunda ParteДокумент2 страницыProyecto Del Curso Segunda ParteCRISTY YAHIDIBI FARRUFIA RENTERIAОценок пока нет
- Introduccion: Caso de Estudio: Gestión de Fincas E InmueblesДокумент10 страницIntroduccion: Caso de Estudio: Gestión de Fincas E InmueblesXavier MacíasОценок пока нет
- Plan curricular de Computación 6to EGBДокумент5 страницPlan curricular de Computación 6to EGBManuel CedeñoОценок пока нет
- Lenguaje RДокумент9 страницLenguaje RLinno Quito ValleОценок пока нет
- Rittal Catálogo General 34 ESPAÑOLДокумент746 страницRittal Catálogo General 34 ESPAÑOLRICARDO100% (1)
- Diccionario InformaticoДокумент2 страницыDiccionario InformaticoNataliaОценок пока нет
- 25 Historia de Una Escalera 03 04Документ52 страницы25 Historia de Una Escalera 03 04rubenrlОценок пока нет
- Mapa Mental Trabajo AutonomoДокумент1 страницаMapa Mental Trabajo AutonomoEve PsОценок пока нет
- Costeo Por Procesos y Por ÓrdenesДокумент15 страницCosteo Por Procesos y Por ÓrdenesPatricio Barragán0% (1)
- Cálculo y geometría analítica en agrimensuraДокумент15 страницCálculo y geometría analítica en agrimensuraCarlos VasquezОценок пока нет
- Manual SIEPRODДокумент13 страницManual SIEPRODGerardo RamirezОценок пока нет
- Macros en ExcelДокумент6 страницMacros en ExcelMagaly BaronОценок пока нет
- Cat Versamed Ivent201 AbДокумент2 страницыCat Versamed Ivent201 Abluiggi colmenaresОценок пока нет
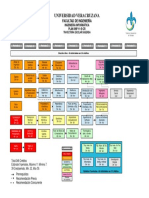
- Trayectoria escolar Ingeniería InformáticaДокумент1 страницаTrayectoria escolar Ingeniería InformáticaDiana UscangaОценок пока нет
- Rut SuramericanaДокумент1 страницаRut Suramericanaconsultorio ricardo gomezОценок пока нет
- Guía de aprendizaje sobre herramientas de búsqueda web y Microsoft WordДокумент4 страницыGuía de aprendizaje sobre herramientas de búsqueda web y Microsoft WordJaviera Valdés AlegríaОценок пока нет
- Nuevo Zas HBB, Acceda A La TDT InteractivaДокумент2 страницыNuevo Zas HBB, Acceda A La TDT InteractivaVEMATELОценок пока нет
- Linux file types install softwareДокумент5 страницLinux file types install softwareBryan ArreolaОценок пока нет
- CV Jhonny Omar Laura QuispeДокумент2 страницыCV Jhonny Omar Laura QuispeJHONNY OMAR LAURA QUISPEОценок пока нет
- La Ingeniería Gráfica. Una Línea en El TiempoДокумент28 страницLa Ingeniería Gráfica. Una Línea en El TiempoEscuela Industriales UPM100% (2)