Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- J.M. Hurst Cyclic AnalysisДокумент45 страницJ.M. Hurst Cyclic AnalysisChristian Robinson80% (10)
- Noise Optimization in Sensor Signal Conditioning Circuit Part IДокумент37 страницNoise Optimization in Sensor Signal Conditioning Circuit Part Iyzhao148Оценок пока нет
- Geotechnical Engineering 1 (RMIT) Course RevisionДокумент53 страницыGeotechnical Engineering 1 (RMIT) Course RevisionSaint123Оценок пока нет
- The Right Stuff PDFДокумент4 страницыThe Right Stuff PDFNeelank Tiwari100% (1)
- Piping Handbook - Hydrocarbon Processing - 1968Документ140 страницPiping Handbook - Hydrocarbon Processing - 1968VS271294% (16)
- Meai Mar 2010Документ36 страницMeai Mar 2010Daneshwer VermaОценок пока нет
- Mimaki Install Guide (En)Документ16 страницMimaki Install Guide (En)หน่อง นพดลОценок пока нет
- Wiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRДокумент2 страницыWiring Color and Pin-Out Schematic Electronic Vessel Control EVC - C, D4/D6-DPH/DPRSivan Raj50% (2)
- Klübersynth UH1 14-151: Product InformationДокумент2 страницыKlübersynth UH1 14-151: Product InformationNathanael SuryantoroОценок пока нет
- Tube Well Design Project SolutionДокумент5 страницTube Well Design Project SolutionEng Ahmed abdilahi IsmailОценок пока нет
- Asme Wec Chapter Annual ReportДокумент12 страницAsme Wec Chapter Annual ReportManazar HussainОценок пока нет
- Online Examination System For AndroidДокумент7 страницOnline Examination System For AndroidSri Sai UniversityОценок пока нет
- Magneto Hydro Dynamics PresentationДокумент19 страницMagneto Hydro Dynamics PresentationVipul GuptaОценок пока нет
- Le22a1321 AocДокумент130 страницLe22a1321 AocEchefisEchefisОценок пока нет
- Curriculum Vitae: Augusto Javier Puican ZarpanДокумент4 страницыCurriculum Vitae: Augusto Javier Puican Zarpanfrank_d_1Оценок пока нет
- HARGA REFERENSI B2S PapuaДокумент6 страницHARGA REFERENSI B2S PapuaAbiyoga AdhityaОценок пока нет
- MILL Series GB-1007 01Документ20 страницMILL Series GB-1007 01Ady IonutОценок пока нет
- Selenium-75 Sources and Source Holders: ApplicationsДокумент2 страницыSelenium-75 Sources and Source Holders: ApplicationsTanpreet SinghОценок пока нет
- Advanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itДокумент16 страницAdvanced Fluid Mechanics: Luigi Di Micco Email: Luigi - Dimicco@dicea - Unipd.itHubert MoforОценок пока нет
- 007-013558-001 SAS PCE SPE With Support For HSM PSE2 Integration Feature Documentation RevCДокумент43 страницы007-013558-001 SAS PCE SPE With Support For HSM PSE2 Integration Feature Documentation RevCpietoeОценок пока нет
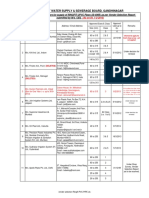
- GWSSB Vendor List 19.11.2013Документ18 страницGWSSB Vendor List 19.11.2013sivesh_rathiОценок пока нет
- Safety Data Sheet 84989 41 3 enДокумент4 страницыSafety Data Sheet 84989 41 3 enAdhiatma Arfian FauziОценок пока нет
- Tutorial - 05 - Excavation Settle 3DДокумент13 страницTutorial - 05 - Excavation Settle 3DAlejandro Camargo SanabriaОценок пока нет
- Electro Magnetic Induction PDFДокумент28 страницElectro Magnetic Induction PDFPuran BistaОценок пока нет
- EN 1991-1-4 NA enДокумент4 страницыEN 1991-1-4 NA enanuj3936100% (1)
- 20105-AR-HOT-07-105-01 Rev 00Документ1 страница20105-AR-HOT-07-105-01 Rev 00Bahaa MohamedОценок пока нет
- Engine Maintenance PartsДокумент13 страницEngine Maintenance PartsSerkanAl100% (1)
- Capstone Documentation RevisedДокумент5 страницCapstone Documentation RevisedMary Joy BolinaОценок пока нет
- Coal Combustion Monitoring Report Unwashed Semi Rev02 08.24.2021Документ17 страницCoal Combustion Monitoring Report Unwashed Semi Rev02 08.24.2021Keith Danae SuquibОценок пока нет
- AirStash Manual A01 PDFДокумент15 страницAirStash Manual A01 PDFArcangelo Di TanoОценок пока нет