Вам также может понравиться
- Actividad 7Документ7 страницActividad 7Alexander WalkerОценок пока нет
- Practica 6 - Teoría ElectromagnéticaДокумент7 страницPractica 6 - Teoría ElectromagnéticaPandaОценок пока нет
- Bitácora Daniela Garcés 2191682Документ1 страницаBitácora Daniela Garcés 2191682Daniela Garcés QuirogaОценок пока нет
- Installing GCC - Configuration - GNU ProjectДокумент31 страницаInstalling GCC - Configuration - GNU ProjectAle PepeОценок пока нет
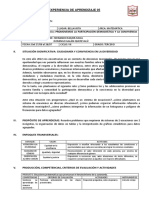
- EDA N°5 3° SecДокумент3 страницыEDA N°5 3° SecDiego Raúl Fernández VasquezОценок пока нет
- Relación de Ejercicios de Electricidad 2º ESOДокумент5 страницRelación de Ejercicios de Electricidad 2º ESOSantiago Morales AndresОценок пока нет
- 03 - 30 5 EjerciciosДокумент4 страницы03 - 30 5 EjerciciosChristian Jeampier Machaca VilcaОценок пока нет
- Sismicidad Inducida Por El MinadoДокумент55 страницSismicidad Inducida Por El MinadoKevin Márquez100% (4)
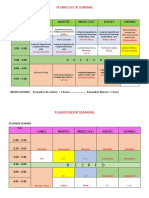
- 5 B. Planificador SemanalДокумент2 страницы5 B. Planificador SemanalJose Stalin Macalopu SerranoОценок пока нет
- Sistema de Registro Académico y AdmisionesДокумент2 страницыSistema de Registro Académico y AdmisionesJulian QuimbayaОценок пока нет
- Generalidades Del Sistema Nervioso y Células ExcitablesДокумент167 страницGeneralidades Del Sistema Nervioso y Células ExcitablesWATEfakОценок пока нет
- Practica IVДокумент14 страницPractica IVLaura MoujanОценок пока нет
- Perfiles IPEДокумент1 страницаPerfiles IPEjuanОценок пока нет
- Valvulas ProduccionДокумент16 страницValvulas ProduccionMeryGraciela100% (1)
- MCM MCDДокумент2 страницыMCM MCDWilly Ramirez TorreОценок пока нет
- Ejercicios de Bases de DatosДокумент5 страницEjercicios de Bases de DatosAnonymous fpWCAsj56yОценок пока нет
- TFG P 363Документ99 страницTFG P 363David PelechanoОценок пока нет
- Reporte 1Документ11 страницReporte 1Luis Gabriel CadenasОценок пока нет
- Propagacion TroposfericaДокумент9 страницPropagacion TroposfericaWalker Alfaro Ccente0% (1)
- Reporte Lem 3 EnchaquetadoДокумент8 страницReporte Lem 3 EnchaquetadoAdanJimenezОценок пока нет
- Operaciones en Quimica Analitica IДокумент5 страницOperaciones en Quimica Analitica IARAMAYO JuanОценок пока нет
- Práctica CORMIX - Caso 2 Chimbiri Aiquipa Jose FernandoДокумент14 страницPráctica CORMIX - Caso 2 Chimbiri Aiquipa Jose FernandoAlex EspinozaОценок пока нет
- 5ºaño4ºdiv - Metodos y Tecnicas Analiticas e Instrumentales I - Guia Nº6Документ4 страницы5ºaño4ºdiv - Metodos y Tecnicas Analiticas e Instrumentales I - Guia Nº6Karen Lorena CarvajalinoОценок пока нет
- Resistencia y Propulsion Deber 2Документ4 страницыResistencia y Propulsion Deber 2Manuel Enrique Morocho LópezОценок пока нет
- Linea de Tiempo, Evalucion de La Computadora.Документ3 страницыLinea de Tiempo, Evalucion de La Computadora.Andrea EucedaОценок пока нет
- Taller de BhopalДокумент4 страницыTaller de BhopalSHARON ANDREA VALENCIA VELANDIAОценок пока нет
- Texto 3Документ20 страницTexto 3EdDy BrahanОценок пока нет
- CUESTIONARIO PREVIO Practica 9 Métodos CuantitativosДокумент3 страницыCUESTIONARIO PREVIO Practica 9 Métodos CuantitativosPascual Vázquez JaquelineОценок пока нет
- Ignacio Moreno Velasco, Apuntes de Instrumentación ElectronicaДокумент40 страницIgnacio Moreno Velasco, Apuntes de Instrumentación ElectronicaVictor Vega CarrionОценок пока нет
- MP 14Документ2 страницыMP 14JOHN SANTOSОценок пока нет