Вам также может понравиться
- Unit 17: Taylor Approximation: Math 22AДокумент4 страницыUnit 17: Taylor Approximation: Math 22ATahzeeb AhmedОценок пока нет
- Higher Order Derivatives and Taylor Expansions: ExampleДокумент4 страницыHigher Order Derivatives and Taylor Expansions: ExampleNorazrizal Aswad Abdul RahmanОценок пока нет
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)От EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Оценок пока нет
- SequnceSeries of FunctionsДокумент50 страницSequnceSeries of FunctionsAlecsandra RusuОценок пока нет
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)От EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)Оценок пока нет
- Solutions To Selected Exercises in Chapter TwoДокумент31 страницаSolutions To Selected Exercises in Chapter TwoEDU CIPANAОценок пока нет
- Calculus Criterion For ConcavityДокумент14 страницCalculus Criterion For ConcavityAbraham JyothimonОценок пока нет
- Cobb DouglasДокумент14 страницCobb DouglasRob WolfeОценок пока нет
- Lecture 6Документ3 страницыLecture 6Tấn Long LêОценок пока нет
- Epigrafo PDFДокумент12 страницEpigrafo PDFxAlexis19xОценок пока нет
- School of Mathematics and Physics, The University of QueenslandДокумент1 страницаSchool of Mathematics and Physics, The University of QueenslandVincent LiuОценок пока нет
- Lec3 Convex Function ExerciseДокумент4 страницыLec3 Convex Function Exercisezxm1485Оценок пока нет
- O4MD 02 FoundationsДокумент8 страницO4MD 02 FoundationsMarcos OliveiraОценок пока нет
- Chapter 4 Differ en Ti Able FunctionsДокумент32 страницыChapter 4 Differ en Ti Able FunctionsJeffrey ChuahОценок пока нет
- Contractions: 3.1 Metric SpacesДокумент10 страницContractions: 3.1 Metric SpacesDaniel Sastoque BuitragoОценок пока нет
- Chapter 2, Lecture 3: Building Convex FunctionsДокумент4 страницыChapter 2, Lecture 3: Building Convex FunctionsCơ Đinh VănОценок пока нет
- Taylor's Theorem in One and Several VariablesДокумент4 страницыTaylor's Theorem in One and Several VariablesTu ShirotaОценок пока нет
- TaylorДокумент5 страницTaylorpazrieОценок пока нет
- G(S) L (F (X) ) F (X) e DX: I. Laplace TransformДокумент7 страницG(S) L (F (X) ) F (X) e DX: I. Laplace TransformSnirPianoОценок пока нет
- 7-Convex OptimizationДокумент34 страницы7-Convex OptimizationTuấn ĐỗОценок пока нет
- Quadratic Mean Differentiability ExampleДокумент5 страницQuadratic Mean Differentiability ExamplemamurtazaОценок пока нет
- AMA286 Supplementary Notes: September 3, 2008Документ30 страницAMA286 Supplementary Notes: September 3, 2008Zoe SinОценок пока нет
- Coercive NessДокумент13 страницCoercive NessArchi DeОценок пока нет
- 1 Theory of Convex FunctionsДокумент14 страниц1 Theory of Convex FunctionsLuis Carlos RojanoОценок пока нет
- MATH 300 Fall 2004 Advanced Boundary Value Problems I Solutions To Sample Final Exam Friday December 3, 2004Документ6 страницMATH 300 Fall 2004 Advanced Boundary Value Problems I Solutions To Sample Final Exam Friday December 3, 2004tehepiconeОценок пока нет
- Fourier TheoremДокумент8 страницFourier TheoremGauravОценок пока нет
- Mathematics 315 - Assignment 2 Solns: e Cos x+2 XДокумент4 страницыMathematics 315 - Assignment 2 Solns: e Cos x+2 XTom DavisОценок пока нет
- Anonymous - Taylor's Theorem PDFДокумент6 страницAnonymous - Taylor's Theorem PDFHarry JakeОценок пока нет
- CProsolsДокумент105 страницCProsolsK Nirmala AnantapurОценок пока нет
- Lecture Notes - 7Документ10 страницLecture Notes - 7Jack100% (1)
- Economics 204 Fall 2012 Problem Set 5 Suggested SolutionsДокумент8 страницEconomics 204 Fall 2012 Problem Set 5 Suggested SolutionsFunWithNumbers88Оценок пока нет
- James NotesДокумент83 страницыJames NotesUmer HuzaifaОценок пока нет
- Chapter 5Документ19 страницChapter 5chilledkarthikОценок пока нет
- Article1 Meanvalue TheoremДокумент6 страницArticle1 Meanvalue TheoremHimansu MookherjeeОценок пока нет
- Lecture 10 Local Extrema and Points of InflectionДокумент4 страницыLecture 10 Local Extrema and Points of InflectionShresth SharmaОценок пока нет
- Lectures#5 9Документ22 страницыLectures#5 9Jargalmaa ErdenemandakhОценок пока нет
- Ma1505 CheatДокумент4 страницыMa1505 CheatSouseiseki ChromeОценок пока нет
- E1 251 Linear and Nonlinear Op2miza2on: Chapter 4: Convex and Quadra2c Func2onsДокумент35 страницE1 251 Linear and Nonlinear Op2miza2on: Chapter 4: Convex and Quadra2c Func2onsdata scienceОценок пока нет
- Control TheoryДокумент45 страницControl TheoryGustavo SánchezОценок пока нет
- Differentiabilitate I+IIДокумент64 страницыDifferentiabilitate I+IIVlad BuldurОценок пока нет
- Feb 2005 SolutionsДокумент4 страницыFeb 2005 Solutionspaul taniwanОценок пока нет
- Section 11.1: Taylor SeriesДокумент8 страницSection 11.1: Taylor SeriesVns VnsОценок пока нет
- Convention: Throughout This Discussion A Feasible Direction D at A Point Is by Definition TakenДокумент12 страницConvention: Throughout This Discussion A Feasible Direction D at A Point Is by Definition TakenNeelabh TiwariОценок пока нет
- 169 Functional EquationsДокумент83 страницы169 Functional Equationshungchng100% (5)
- Taylor ExpansionДокумент8 страницTaylor ExpansionJammy4411Оценок пока нет
- Non Linear Optimization ModifiedДокумент78 страницNon Linear Optimization ModifiedSteven DreckettОценок пока нет
- HW140B 2 SolutionsДокумент6 страницHW140B 2 SolutionsIdris AddouОценок пока нет
- Chapter 3Документ43 страницыChapter 3Di WuОценок пока нет
- Mathematics 315 - Assignment 1: X A X A X A X A X AДокумент4 страницыMathematics 315 - Assignment 1: X A X A X A X A X ATom DavisОценок пока нет
- Learning Hessian Matrix PDFДокумент100 страницLearning Hessian Matrix PDFSirajus SalekinОценок пока нет
- Math 319 Notes, A.SДокумент13 страницMath 319 Notes, A.SNahitMacitGuntepeОценок пока нет
- Concave and Quasiconcave FunctionsДокумент9 страницConcave and Quasiconcave FunctionsceliusОценок пока нет
- 09 01 Differentiation PDFДокумент24 страницы09 01 Differentiation PDFSri DОценок пока нет
- Lec21Документ4 страницыLec21Robert John DoodyОценок пока нет
- Chapter 3 - Power SeriesДокумент19 страницChapter 3 - Power SeriesAlex TanОценок пока нет
- MR 4 2023 Functional EquationsДокумент9 страницMR 4 2023 Functional Equationshqv2014Оценок пока нет
- Lecture 14Документ4 страницыLecture 14mohinuddin12456Оценок пока нет
- Convex FunctionsДокумент9 страницConvex Functionseustachy2Оценок пока нет
- A Few Notes For Chapter III: Technical University of Lisbon ISEG (School of Economics and Management)Документ12 страницA Few Notes For Chapter III: Technical University of Lisbon ISEG (School of Economics and Management)maryОценок пока нет
- Advanced Stata For Linear ModelsДокумент11 страницAdvanced Stata For Linear ModelsmaryОценок пока нет
- Lecture Categorization and SchedulingДокумент6 страницLecture Categorization and SchedulingmaryОценок пока нет
- He Is Able LyricsДокумент1 страницаHe Is Able LyricsmaryОценок пока нет
- Nuxeo BookДокумент335 страницNuxeo Bookdannao4Оценок пока нет
- Estimation of Microbial GrowthДокумент25 страницEstimation of Microbial GrowthziaiitdОценок пока нет
- Mesh Based Multicast Routing ProtocolДокумент10 страницMesh Based Multicast Routing ProtocolArul JothiОценок пока нет
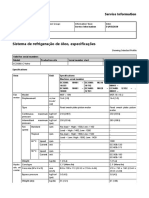
- Sistema de Refrigeração de Óleo, EspecificaçõesДокумент2 страницыSistema de Refrigeração de Óleo, EspecificaçõesAlexandreОценок пока нет
- 39 - Profil Uang Elektronik - Spesifikasi TeknisДокумент9 страниц39 - Profil Uang Elektronik - Spesifikasi TeknisM DedeОценок пока нет
- Experimental Study of Estimating The Subgrade Reaction ModulusДокумент6 страницExperimental Study of Estimating The Subgrade Reaction ModulusIngeniero EstructuralОценок пока нет
- Applications of Linear Algebra in Computer ScienceДокумент8 страницApplications of Linear Algebra in Computer ScienceSameed Ahmed Rafi100% (2)
- Din 2095Документ42 страницыDin 2095Eduardo ValenciaОценок пока нет
- Planets and Solar System The Complete Manual 2016Документ132 страницыPlanets and Solar System The Complete Manual 2016Sonechka Sonya100% (3)
- DC Lecture Slides 1 - Information TheoryДокумент22 страницыDC Lecture Slides 1 - Information TheoryG VenkateshОценок пока нет
- Manual HoneywellДокумент36 страницManual HoneywellVicente RodriguezОценок пока нет
- 3D-ICONS Guidelines PDFДокумент53 страницы3D-ICONS Guidelines PDFAna Paula Ribeiro de AraujoОценок пока нет
- 1 Logic GatesДокумент4 страницы1 Logic GatesdassonyОценок пока нет
- Training Cases: SimaticДокумент11 страницTraining Cases: SimaticKatty MenaОценок пока нет
- Contoh Pembentangan Poster Di ConferenceДокумент1 страницаContoh Pembentangan Poster Di ConferenceIka 1521Оценок пока нет
- Introduction To Computer Networks: NetworkДокумент61 страницаIntroduction To Computer Networks: NetworkSaihari NarayanОценок пока нет
- How Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorДокумент4 страницыHow Can Dust Make Planets More Suitable For Life?: Authors: Associate EditorLucien GbezeОценок пока нет
- Article On Online ShoppingДокумент23 страницыArticle On Online ShoppingsaravmbaОценок пока нет
- 2007 Paper - Water Injection Effects On Compressor Stage OperationДокумент30 страниц2007 Paper - Water Injection Effects On Compressor Stage OperationBassam ElsayedОценок пока нет
- Name: Class Number: - Date: - Section: - ScheduleДокумент11 страницName: Class Number: - Date: - Section: - ScheduleErica AguirreОценок пока нет
- Koine GreekДокумент226 страницKoine GreekΜάριος Αθανασίου100% (6)
- Datasheet Cpu 416-2Документ13 страницDatasheet Cpu 416-2Danu MaldinoОценок пока нет
- Statistics Hand NotesДокумент16 страницStatistics Hand NotesAtul VermaОценок пока нет
- ASM Lab Record BookДокумент36 страницASM Lab Record BookNandan HegdeОценок пока нет
- Joining ProcessДокумент122 страницыJoining ProcessJackson ..Оценок пока нет
- Programming in C - CPU Scheduling - Round RobinДокумент3 страницыProgramming in C - CPU Scheduling - Round RobinGenus SumОценок пока нет
- NASA Facts Explorer XVI The Micrometeoroid SatelliteДокумент4 страницыNASA Facts Explorer XVI The Micrometeoroid SatelliteBob AndrepontОценок пока нет
- Long Quiz Direct VariationДокумент2 страницыLong Quiz Direct VariationHermann Dejero LozanoОценок пока нет
- Woodward LeoPC Engineering ManualДокумент40 страницWoodward LeoPC Engineering ManualZafar AwanОценок пока нет
- SampleДокумент43 страницыSampleSri E.Maheswar Reddy Assistant ProfessorОценок пока нет
- Summary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisОт EverandSummary: Trading in the Zone: Trading in the Zone: Master the Market with Confidence, Discipline, and a Winning Attitude by Mark Douglas: Key Takeaways, Summary & AnalysisРейтинг: 5 из 5 звезд5/5 (15)
- How to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipОт EverandHow to Talk to Anyone: Learn the Secrets of Good Communication and the Little Tricks for Big Success in RelationshipРейтинг: 4.5 из 5 звезд4.5/5 (1135)
- Weapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingОт EverandWeapons of Mass Instruction: A Schoolteacher's Journey Through the Dark World of Compulsory SchoolingРейтинг: 4.5 из 5 звезд4.5/5 (149)
- Dumbing Us Down: The Hidden Curriculum of Compulsory SchoolingОт EverandDumbing Us Down: The Hidden Curriculum of Compulsory SchoolingРейтинг: 4.5 из 5 звезд4.5/5 (497)
- How to Improve English Speaking: How to Become a Confident and Fluent English SpeakerОт EverandHow to Improve English Speaking: How to Become a Confident and Fluent English SpeakerРейтинг: 4.5 из 5 звезд4.5/5 (56)
- Summary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisОт EverandSummary: The Laws of Human Nature: by Robert Greene: Key Takeaways, Summary & AnalysisРейтинг: 4.5 из 5 звезд4.5/5 (30)
- Cynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyОт EverandCynical Theories: How Activist Scholarship Made Everything about Race, Gender, and Identity―and Why This Harms EverybodyРейтинг: 4.5 из 5 звезд4.5/5 (221)
- Summary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisОт EverandSummary: I'm Glad My Mom Died: by Jennette McCurdy: Key Takeaways, Summary & AnalysisРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Summary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisОт EverandSummary: The 5AM Club: Own Your Morning. Elevate Your Life. by Robin Sharma: Key Takeaways, Summary & AnalysisРейтинг: 4.5 из 5 звезд4.5/5 (22)
- The 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageОт EverandThe 16 Undeniable Laws of Communication: Apply Them and Make the Most of Your MessageРейтинг: 5 из 5 звезд5/5 (73)
- Stoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionОт EverandStoicism The Art of Happiness: How the Stoic Philosophy Works, Living a Good Life, Finding Calm and Managing Your Emotions in a Turbulent World. New VersionРейтинг: 5 из 5 звезд5/5 (51)
- Learn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25От EverandLearn Japanese - Level 1: Introduction to Japanese, Volume 1: Volume 1: Lessons 1-25Рейтинг: 5 из 5 звезд5/5 (17)
- Why Smart People Hurt: A Guide for the Bright, the Sensitive, and the CreativeОт EverandWhy Smart People Hurt: A Guide for the Bright, the Sensitive, and the CreativeРейтинг: 3.5 из 5 звезд3.5/5 (54)
- Summary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisОт EverandSummary: It Didn't Start with You: How Inherited Family Trauma Shapes Who We Are and How to End the Cycle By Mark Wolynn: Key Takeaways, Summary & AnalysisРейтинг: 5 из 5 звезд5/5 (3)
- Summary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedОт EverandSummary: Dotcom Secrets: The Underground Playbook for Growing Your Company Online with Sales Funnels by Russell Brunson: Key Takeaways, Summary & Analysis IncludedРейтинг: 5 из 5 звезд5/5 (2)
- You Are Not Special: And Other EncouragementsОт EverandYou Are Not Special: And Other EncouragementsРейтинг: 4.5 из 5 звезд4.5/5 (6)
- Make It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningОт EverandMake It Stick by Peter C. Brown, Henry L. Roediger III, Mark A. McDaniel - Book Summary: The Science of Successful LearningРейтинг: 4.5 из 5 звезд4.5/5 (55)
- Follow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.От EverandFollow your interests: This will make you feel better about yourself and what you can do.: inspiration and wisdom for achieving a fulfilling life.Оценок пока нет
- Rooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareОт EverandRooted in Joy: Creating a Classroom Culture of Equity, Belonging, and CareОценок пока нет
- Financial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveОт EverandFinancial Feminist: Overcome the Patriarchy's Bullsh*t to Master Your Money and Build a Life You LoveРейтинг: 5 из 5 звезд5/5 (1)
- Summary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisОт EverandSummary: Greenlights: by Matthew McConaughey: Key Takeaways, Summary & AnalysisРейтинг: 4 из 5 звезд4/5 (6)
- Little Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveОт EverandLittle Soldiers: An American Boy, a Chinese School, and the Global Race to AchieveРейтинг: 4 из 5 звезд4/5 (25)