Вам также может понравиться
- Arranque Del Motor Con Devanados de AmortiguamientoДокумент6 страницArranque Del Motor Con Devanados de AmortiguamientoMiguel Monroy100% (1)
- Descripción de La Placa de Datos de Un Motor SíncronoДокумент5 страницDescripción de La Placa de Datos de Un Motor SíncronoYessica Hdez.Оценок пока нет
- Maquinas de Corriente AlternaДокумент36 страницMaquinas de Corriente AlternaJulio MarinoОценок пока нет
- Fundamentos Básicos de ServomotoresДокумент26 страницFundamentos Básicos de ServomotoresHernan Mayna100% (6)
- Analisis de Fallas de Un GeneradorДокумент9 страницAnalisis de Fallas de Un GeneradorLuis Lara100% (2)
- Manual de Despiece y Reparacion Del AlternadorДокумент11 страницManual de Despiece y Reparacion Del AlternadorAnderson Matos100% (3)
- Informe de Practicas Arranque y Paro de Un MotorДокумент9 страницInforme de Practicas Arranque y Paro de Un MotorJOHAN QUI�ONEZОценок пока нет
- Magnetismo y ElectromagnetismoДокумент32 страницыMagnetismo y ElectromagnetismoLuis Lastra100% (1)
- Diseño y Construcción de Un Motor de InducciónДокумент6 страницDiseño y Construcción de Un Motor de InducciónLuis Carlos JaramilloОценок пока нет
- Informe Laboratorio Variadores de FrecuenciaДокумент21 страницаInforme Laboratorio Variadores de FrecuenciaAndres Nuñez50% (2)
- Rectificador de Onda CompletaДокумент17 страницRectificador de Onda CompletaDavid Gálvez100% (2)
- Motor AsíncronoДокумент29 страницMotor AsíncronoSergio Marcial100% (1)
- Parametros Del Variador de Velocidad en Cade SimuДокумент6 страницParametros Del Variador de Velocidad en Cade SimuMaurico Cruz50% (2)
- P3 MaquinasДокумент22 страницыP3 MaquinasIsai SanchezОценок пока нет
- Documento Ravi TraducidoДокумент40 страницDocumento Ravi Traducidopedroaraque75% (4)
- Frenado DinamicoДокумент14 страницFrenado DinamicoLindbergh キラ Marquez0% (1)
- Preguntas de Maquinas SincronasДокумент4 страницыPreguntas de Maquinas SincronasJose Sullca0% (1)
- Direccionamiento InternoДокумент3 страницыDireccionamiento InternoEmmanuel Noé100% (2)
- Máquinas-Práctica-4 - Equipo 15 - 5AM2Документ41 страницаMáquinas-Práctica-4 - Equipo 15 - 5AM2Near YagamiОценок пока нет
- Motor de ReluctanciaДокумент31 страницаMotor de ReluctanciaWil Liam67% (9)
- Abc Del Motor SincronoДокумент56 страницAbc Del Motor SincronoDEPARTAMENTO ELECTRONICA FASEEL100% (1)
- Tarea 1 - Unidad 5 Motores de Inducción Monofásicos y Máquinas EspecialesДокумент17 страницTarea 1 - Unidad 5 Motores de Inducción Monofásicos y Máquinas EspecialesOWopatasОценок пока нет
- Control Vectorial de Motores de Corriente Alterna.Документ36 страницControl Vectorial de Motores de Corriente Alterna.Raul Negron GodoyОценок пока нет
- Control de Motores SíncronosДокумент6 страницControl de Motores SíncronosJaime ZeaОценок пока нет
- ARRANCADORESДокумент12 страницARRANCADORESStalyn Vela100% (1)
- Control Escalar y VectorialДокумент6 страницControl Escalar y VectorialJesus Rosas MontalvoОценок пока нет
- Operación Paralelo Generadores SíncronosДокумент10 страницOperación Paralelo Generadores SíncronosCesar HuamaniОценок пока нет
- Ejercicios ElectromagnetismoДокумент6 страницEjercicios ElectromagnetismoIsrael CastroОценок пока нет
- Tca 785Документ9 страницTca 785Walter Eleazar GuillenОценок пока нет
- Guia 1 Electroneumatica TAI - 18 - 19Документ26 страницGuia 1 Electroneumatica TAI - 18 - 19LUIS DAVID ACEVEDO RUZ100% (1)
- Alarma y Cierre CentralizadoДокумент14 страницAlarma y Cierre CentralizadoFelipe Piperock Peña83% (6)
- Maquina SIncronicaДокумент36 страницMaquina SIncronicaBrian AlvarezОценок пока нет
- Semaforo en CodeSysДокумент11 страницSemaforo en CodeSysHolami Nombrees Jose Angel100% (1)
- Informe de Inversor TrifásicoДокумент8 страницInforme de Inversor TrifásicoRandyzinho RGОценок пока нет
- Motor Asíncrono y SíncronoДокумент10 страницMotor Asíncrono y Síncronoregisters50% (4)
- Motor de CD Con Devanado CompuestoДокумент6 страницMotor de CD Con Devanado Compuestomalc1989100% (2)
- Regulador Automático de VelocidadДокумент13 страницRegulador Automático de VelocidadJhonathan Salazar CostaОценок пока нет
- Frenado TrifasicoДокумент11 страницFrenado TrifasicoGonzalo Avalos PalominoОценок пока нет
- Reporte Arranque y ParoДокумент5 страницReporte Arranque y ParoEnrique Topete0% (1)
- JBДокумент21 страницаJBAna LucyОценок пока нет
- Interfaces de Comunicación Del PLCДокумент3 страницыInterfaces de Comunicación Del PLCSebastian Victoria LopezОценок пока нет
- Lab 09 Transformador RegulanteДокумент5 страницLab 09 Transformador RegulanteAbelardo WarnerОценок пока нет
- Control Estatico de Motores ElectricosДокумент13 страницControl Estatico de Motores Electricossteven somarriba0% (1)
- Apunte de Alternador y EjerciciosДокумент7 страницApunte de Alternador y EjerciciosMartinez JulioОценок пока нет
- Diagrama de Escalera, Bobina Relevador, ElectroválvulaДокумент3 страницыDiagrama de Escalera, Bobina Relevador, Electroválvulalmaldonado_349011100% (1)
- Práctica 8Документ13 страницPráctica 8Jorge Cortés0% (3)
- Uso Del MOC3011 PDFДокумент6 страницUso Del MOC3011 PDFMalisol Sol100% (1)
- Lección 15 - Reguladores CA-CAДокумент14 страницLección 15 - Reguladores CA-CAKike Fernandez100% (1)
- Práctica 5. Variador de VelocidadДокумент5 страницPráctica 5. Variador de VelocidadJosh Israel PritchardОценок пока нет
- ServomotoresДокумент5 страницServomotores136692Оценок пока нет
- Motor SincronoДокумент7 страницMotor SincronoZambita SantosОценок пока нет
- Articulo - Análisis Del Comportamiento de Un Panel Solar A Través de Scilab.Документ6 страницArticulo - Análisis Del Comportamiento de Un Panel Solar A Través de Scilab.Erick Damian Guerrero RodriguezОценок пока нет
- El Motor Compound DiferencialДокумент1 страницаEl Motor Compound DiferencialSantos Martinez0% (1)
- Apuntes Motor en DerivacionДокумент12 страницApuntes Motor en Derivacionmaryebm67% (3)
- Solucionario de Sistemas Electricos de Potencia de Syed A Nasar Schaum PDF FreeДокумент10 страницSolucionario de Sistemas Electricos de Potencia de Syed A Nasar Schaum PDF FreeRaul reyes muñozОценок пока нет
- Rectificador Trifásico Con PSIMДокумент6 страницRectificador Trifásico Con PSIMjeniОценок пока нет
- Maquinas Sincronas y Asincronas InvestigacionДокумент9 страницMaquinas Sincronas y Asincronas Investigacionhu3Оценок пока нет
- Rectificador Controlado de Onda CompletaДокумент17 страницRectificador Controlado de Onda CompletaMiguel GuardiaОценок пока нет
- Polaridad SustractivaДокумент7 страницPolaridad SustractivaAlfredo OrtegaОценок пока нет
- Aplicaciones de Los RelevadoresДокумент3 страницыAplicaciones de Los RelevadoresUriel FarfanОценок пока нет
- Controladores ACДокумент31 страницаControladores ACMiguel Alarcón de la CruzОценок пока нет
- Alternador SincronoДокумент10 страницAlternador SincronoDanny CadenaОценок пока нет
- Como Usar El ContactorДокумент9 страницComo Usar El Contactorelectrico1219Оценок пока нет
- Arranque de Motores Jaula de ArdillaДокумент10 страницArranque de Motores Jaula de ArdillaMarcelo TolaОценок пока нет
- Marco TeoricoДокумент5 страницMarco TeoricoGiovanni QCОценок пока нет
- Clase01 VideoconferenciaДокумент14 страницClase01 VideoconferenciaDario Ezequiel Estrada TrujilloОценок пока нет
- Ecuaciones Eje 3Документ9 страницEcuaciones Eje 3Sodimac HomecenterОценок пока нет
- Fase 4 Analisis de CircuitosДокумент12 страницFase 4 Analisis de CircuitosManuel AldanaОценок пока нет
- Arrancadores de Estaado SolidoДокумент22 страницыArrancadores de Estaado SolidoGrimerzhito Eguia Farfan100% (2)
- Teorema de Enlace de FlujosДокумент7 страницTeorema de Enlace de FlujosJorge Luis BustamanteОценок пока нет
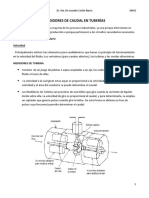
- Medidores de Caudal en TuberíasДокумент2 страницыMedidores de Caudal en TuberíasNelly Karina100% (1)
- Syllabus Circuitos de Corriente AlternaДокумент12 страницSyllabus Circuitos de Corriente AlternaJeffrey PadillaОценок пока нет
- Ensayo TransformadorДокумент9 страницEnsayo TransformadorJulieta A. TobónОценок пока нет
- Labo Maquinas 1 UCRДокумент15 страницLabo Maquinas 1 UCRArturo Quiros50% (2)
- %plan de Clases-Física-Quimica-2-BguДокумент3 страницы%plan de Clases-Física-Quimica-2-Bgurami pinan0% (1)
- Generador SincronoДокумент27 страницGenerador SincronocarlitosfuenterОценок пока нет
- Circuitos RLCДокумент15 страницCircuitos RLCAxel RoblesОценок пока нет
- Ingeniería Eléctrica Explicada - Características de La Bobina de Onda PortadoraДокумент4 страницыIngeniería Eléctrica Explicada - Características de La Bobina de Onda Portadorawaldo kuhnОценок пока нет
- 2021 - 01 FII Semana - 13 Sesión 50Документ24 страницы2021 - 01 FII Semana - 13 Sesión 50Jesus Gabriel Mantilla QuispeОценок пока нет
- Monografia Completa - CondeДокумент132 страницыMonografia Completa - CondeLuis Luchini FernandezОценок пока нет
- Taller Guía 7Документ13 страницTaller Guía 7Evelyn Gutierrez OsorioОценок пока нет
- Informe Lab 3 Maquinas ElectricasДокумент10 страницInforme Lab 3 Maquinas ElectricasjimmyОценок пока нет
- Informe Alternador GTA34 - CSIДокумент14 страницInforme Alternador GTA34 - CSImauricio suarezОценок пока нет
- Receptor AMДокумент2 страницыReceptor AMGuillermo SalazarОценок пока нет
- Motor ElectricoДокумент3 страницыMotor ElectricoJhonatanОценок пока нет
- Elecricidad Inalámbrica (Ensayo)Документ13 страницElecricidad Inalámbrica (Ensayo)angelОценок пока нет
- Trabajp Preparatorio LAB 4Документ8 страницTrabajp Preparatorio LAB 4Andres valdezОценок пока нет
- Transformadores ParaninfoДокумент22 страницыTransformadores ParaninfoJose GomezОценок пока нет
- Solucionario 2da Práctica de Máquinas Eléctricas EE-211 2019-IIДокумент8 страницSolucionario 2da Práctica de Máquinas Eléctricas EE-211 2019-IILucho_del_PeruОценок пока нет