Вам также может понравиться
- Sistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFОт EverandSistemas de puesta a tierra: Diseñado con IEEE-80 y evaluado con MEFРейтинг: 4.5 из 5 звезд4.5/5 (7)
- UF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosОт EverandUF1966 - Operaciones auxiliares en el mantenimiento de equipos electrónicosРейтинг: 5 из 5 звезд5/5 (1)
- Introducción a las señales y sistemasОт EverandIntroducción a las señales y sistemasРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Experiencias sobre circuitos eléctricos en serie operados por corriente directaОт EverandExperiencias sobre circuitos eléctricos en serie operados por corriente directaОценок пока нет
- 2019 07 10 Problemas Metodos Numericos V9Документ138 страниц2019 07 10 Problemas Metodos Numericos V9Camila PerdomoОценок пока нет
- Problemas de Calculo Diferencial e IntegralДокумент134 страницыProblemas de Calculo Diferencial e IntegralLuis Augusto Calizaya Castillo100% (3)
- Ejercicios de Cálculo Diferencial (JaverianaДокумент15 страницEjercicios de Cálculo Diferencial (JaverianaLuisa C Martinez100% (1)
- Diseño de Un Controlador Pid Analogo para Un Circuito RC de Segundo Orden Mediante La Sisotool de MatlabДокумент51 страницаDiseño de Un Controlador Pid Analogo para Un Circuito RC de Segundo Orden Mediante La Sisotool de Matlabmorgan1100% (25)
- Modelos Matematicos de Sistemas FisicosДокумент39 страницModelos Matematicos de Sistemas Fisicosanabelenn93% (44)
- Amplificadores: Sistemas de Ecuaciones DiferencialesДокумент10 страницAmplificadores: Sistemas de Ecuaciones DiferencialesJoan JoseОценок пока нет
- Exploración Matemática - IbДокумент16 страницExploración Matemática - IbCorazones De Hierro100% (1)
- Análisis de La Respuesta Transitoria y EstacionariaДокумент27 страницAnálisis de La Respuesta Transitoria y EstacionariaAlfredo Gil Velasco100% (1)
- Teoria de ControlДокумент111 страницTeoria de ControlGabriela LópezОценок пока нет
- Analisis de Sistemas Dinamicos 1 PDFДокумент87 страницAnalisis de Sistemas Dinamicos 1 PDFJessica Tafur100% (2)
- Sistemas DinamicosДокумент39 страницSistemas DinamicosAnonymous byBKseNN100% (1)
- E.4.26.1-TE-02-1 - Errores en Régimen PermanenteДокумент10 страницE.4.26.1-TE-02-1 - Errores en Régimen PermanenteNico StroiliОценок пока нет
- Clase 3 Dinamica de SisДокумент11 страницClase 3 Dinamica de SisFrancisco Plascencia SuarezОценок пока нет
- Unidad 2 - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaДокумент10 страницUnidad 2 - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaPablo ForeroОценок пока нет
- Modelos Matematicos de Sistemas Fisicos.Документ32 страницыModelos Matematicos de Sistemas Fisicos.Claudio Valdes GutierrezОценок пока нет
- Experiencia 8 - Equipo 8-21-06-2021Документ14 страницExperiencia 8 - Equipo 8-21-06-2021mStudio mGroupОценок пока нет
- Sistemas de Primer y Segundo OrdenДокумент15 страницSistemas de Primer y Segundo Ordenalejandro cuckeitorОценок пока нет
- Sistemas de ControДокумент26 страницSistemas de ControJORGE ARIEL CHICAIZA CHILUIZAОценок пока нет
- Analisis de Sistemas DinamicosДокумент87 страницAnalisis de Sistemas DinamicosJuanCarlosJimenez1Оценок пока нет
- ASIYSEG6E4RRSDДокумент24 страницыASIYSEG6E4RRSDDanae Guadalupe Perez NicolasОценок пока нет
- Trabajo 2 Teoria de ControlДокумент6 страницTrabajo 2 Teoria de ControlDaniel RocaОценок пока нет
- Analisis de La Respuesta Transitoria y Estacionaria v1Документ21 страницаAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaОценок пока нет
- Analisis de La Respuesta Transitoria y Estacionaria v1Документ21 страницаAnalisis de La Respuesta Transitoria y Estacionaria v1Juan C GamboaОценок пока нет
- E.4.26.1-TE-03B-2-Síntesis de Correctores en ReacciónДокумент15 страницE.4.26.1-TE-03B-2-Síntesis de Correctores en ReacciónNico StroiliОценок пока нет
- Sistemas Fisicos de ControlДокумент3 страницыSistemas Fisicos de ControlwizardgayОценок пока нет
- Cortes Villalvazo Gloria INSB Sistemas de Control Tarea2.2 2unidadДокумент9 страницCortes Villalvazo Gloria INSB Sistemas de Control Tarea2.2 2unidadFATIMA MARGARITA LOPEZ MAGANAОценок пока нет
- Practica 2 Análisis en Frecuencia de Sistemas.Документ17 страницPractica 2 Análisis en Frecuencia de Sistemas.tonyОценок пока нет
- Modelado y Simulación de Sistemas FisicosДокумент21 страницаModelado y Simulación de Sistemas FisicosRoberto VeltriОценок пока нет
- Análisis de respuesta transitoria con amplificadores operacionalesДокумент10 страницAnálisis de respuesta transitoria con amplificadores operacionalesHuyThaiОценок пока нет
- Practica 1 (Dinámica de Sistemas)Документ12 страницPractica 1 (Dinámica de Sistemas)Rogelio D' SantiagoОценок пока нет
- Bitácora de Aprendizaje UT-3++Документ34 страницыBitácora de Aprendizaje UT-3++FLAVIO CESAR SANCHEZ MARTINEZОценок пока нет
- Obtencion de La Funcion de Transferencia PDFДокумент18 страницObtencion de La Funcion de Transferencia PDFPatricio Antonio Cortés PeñaОценок пока нет
- Tarea3 Mickeal Raad Sistema DinamicosДокумент22 страницыTarea3 Mickeal Raad Sistema DinamicosMaikel RaadОценок пока нет
- Brigada 3 Practica2 Grupo 15Документ13 страницBrigada 3 Practica2 Grupo 15Alexis De León LópezОценок пока нет
- Dimec: AutomatizaciónДокумент16 страницDimec: AutomatizaciónEduardo HidalgoОценок пока нет
- Practica 2 E3 G5Документ28 страницPractica 2 E3 G5José Juan G.S.Оценок пока нет
- Efectos de Adicion de Ceros y Polos A LaДокумент4 страницыEfectos de Adicion de Ceros y Polos A Lakashirosheya1Оценок пока нет
- Laboratorio N°6 Sistemas de Segundo OrdenДокумент5 страницLaboratorio N°6 Sistemas de Segundo OrdenAnaisОценок пока нет
- L2 Modelamiento y Transformada LaplaceДокумент16 страницL2 Modelamiento y Transformada Laplacejack1234512345Оценок пока нет
- Análisis respuesta transitoria sistemas controlДокумент39 страницAnálisis respuesta transitoria sistemas controlELISBAN CHILLITUPA SEGOVIAОценок пока нет
- Matematica AplicadaДокумент12 страницMatematica AplicadaFrai Wilder Zapana MamaniОценок пока нет
- Circuito RLCДокумент4 страницыCircuito RLCAlexa ElyОценок пока нет
- Analisis Respuesta TransitoriaДокумент26 страницAnalisis Respuesta TransitoriaRen C ChОценок пока нет
- Respuesta de SistemasДокумент24 страницыRespuesta de SistemasCinthya RmsОценок пока нет
- Control SensibilidadДокумент6 страницControl SensibilidadOmar MedinaОценок пока нет
- Control Lineal y Control No LinealДокумент16 страницControl Lineal y Control No LinealolpОценок пока нет
- Sistemas de control: respuesta transitoria, orden y estabilidadДокумент6 страницSistemas de control: respuesta transitoria, orden y estabilidadLeopoldoMenesesRinconОценок пока нет
- Análisis de respuesta transitoria y sistemas de segundo ordenДокумент14 страницAnálisis de respuesta transitoria y sistemas de segundo ordenRenzoMahrОценок пока нет
- 4 ModeladoДокумент47 страниц4 ModeladoFelipe GmbОценок пока нет
- Practica 5 PDFДокумент24 страницыPractica 5 PDFFernando CuéllarОценок пока нет
- Análisis del diseño de circuitos de potencia y filtrado mediante transformada de LaplaceДокумент18 страницAnálisis del diseño de circuitos de potencia y filtrado mediante transformada de LaplaceJose M CaballeroОценок пока нет
- Ensayo CacepДокумент3 страницыEnsayo CacepJoseiito Jesus DОценок пока нет
- Respuesta Dinamica GabДокумент24 страницыRespuesta Dinamica GabJosuè Priego SanabriaОценок пока нет
- U2 - Actividad 1 - LeemeДокумент12 страницU2 - Actividad 1 - LeemeIsmael Ochoa100% (1)
- Investigación Control IIДокумент87 страницInvestigación Control IImario gomezОценок пока нет
- Función de Transferencia y Diagrama de BloquesДокумент15 страницFunción de Transferencia y Diagrama de BloquesJonathan OmarОценок пока нет
- LabED2 - MieV1 - 9,10 - E1 - P2Документ10 страницLabED2 - MieV1 - 9,10 - E1 - P2Eduardo AsencioОценок пока нет
- P1. Simulación de Sistemas MecánicosДокумент5 страницP1. Simulación de Sistemas MecánicosGus PalacioОценок пока нет
- 113565635Документ18 страниц113565635Naimersoft SolucionesОценок пока нет
- Pid Z-NДокумент12 страницPid Z-NEugenio Hermosilla CorderoОценок пока нет
- Tabla de Resistencias Comerciales PDFДокумент1 страницаTabla de Resistencias Comerciales PDFRick GrimesОценок пока нет
- Esquema de Trabajo de Control Por Computador Curso 2015-16Документ5 страницEsquema de Trabajo de Control Por Computador Curso 2015-16Anonymous sdIO5zckp4Оценок пока нет
- Control Digital Con MatlabДокумент176 страницControl Digital Con MatlabelijbbОценок пока нет
- Tutorial Analisis y Control de Sistemas Usando MATLABДокумент44 страницыTutorial Analisis y Control de Sistemas Usando MATLABValmore CamachoОценок пока нет
- Tutorial Analisis y Control de Sistemas Usando MATLABДокумент44 страницыTutorial Analisis y Control de Sistemas Usando MATLABValmore CamachoОценок пока нет
- Comandos MatlabДокумент2 страницыComandos MatlabJuan Carlos Gonzales ArosteОценок пока нет
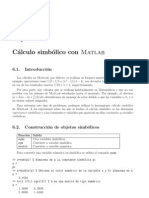
- Cap 6 de MatlabДокумент10 страницCap 6 de MatlabJose J. VazquezОценок пока нет
- Comandos MatlabДокумент2 страницыComandos MatlabJuan Carlos Gonzales ArosteОценок пока нет
- Examen Resuelto CPCДокумент14 страницExamen Resuelto CPCAnonymous sdIO5zckp4Оценок пока нет
- Examen Resuelto de Septiembre 2015 PDFДокумент11 страницExamen Resuelto de Septiembre 2015 PDFAnonymous sdIO5zckp4Оценок пока нет
- Trabajo Fin de GradoДокумент8 страницTrabajo Fin de GradoAnonymous sdIO5zckp4Оценок пока нет
- Memoria Ingenieria Electronica Robotica y Mecatronica - Programa MinisterioДокумент256 страницMemoria Ingenieria Electronica Robotica y Mecatronica - Programa MinisterioBertoОценок пока нет
- Trabajo Fin de GradoДокумент8 страницTrabajo Fin de GradoAnonymous sdIO5zckp4Оценок пока нет
- IntroduccionALaMatematica - Ing. en ComputaciónДокумент5 страницIntroduccionALaMatematica - Ing. en ComputaciónAgustin PallardóОценок пока нет
- Trabajo 2do Parcial de Métodos NuméricosДокумент12 страницTrabajo 2do Parcial de Métodos Numéricosleidy rivasОценок пока нет
- Introducción Al Cálculo DiferencialДокумент17 страницIntroducción Al Cálculo Diferencialsonia baqueroОценок пока нет
- Métodos Matemáticos LAR-II-2021 U-2 Parte 1 Diferenciación Compleja Resumen TeóricoДокумент7 страницMétodos Matemáticos LAR-II-2021 U-2 Parte 1 Diferenciación Compleja Resumen TeóricoKate ValeryОценок пока нет
- Temario de Obs MeteorológicoДокумент9 страницTemario de Obs MeteorológicoDavid Merino100% (1)
- 4.1 4.2 4.3 Calculo DERIVADAS INV..Документ16 страниц4.1 4.2 4.3 Calculo DERIVADAS INV..Zurianis RodriguezОценок пока нет
- Cálculo I UES Espíritu SantoДокумент11 страницCálculo I UES Espíritu SantoDilan ArielОценок пока нет
- Calculo Diferencial Derivadas Proyecto de Aula 1 1 PDFДокумент4 страницыCalculo Diferencial Derivadas Proyecto de Aula 1 1 PDFmoisesОценок пока нет
- Derivación: Taller sobre conceptos y aplicacionesДокумент8 страницDerivación: Taller sobre conceptos y aplicacionesOrle SánchezОценок пока нет
- Tarea 3 Consolidado FinalДокумент22 страницыTarea 3 Consolidado FinalGustavo Castillo ZeaОценок пока нет
- Matematicabasica - 2 - 103 1 00 2023Документ3 страницыMatematicabasica - 2 - 103 1 00 2023Angel HerbraОценок пока нет
- Balance de Energía en Estado Inestable para El Diseño de BiorreactoresДокумент17 страницBalance de Energía en Estado Inestable para El Diseño de BiorreactoresjesusОценок пока нет
- Ejerc Cin Uni 2Документ15 страницEjerc Cin Uni 2YO MOОценок пока нет
- Descripción Lagrangiana y EulerianaДокумент42 страницыDescripción Lagrangiana y EulerianaLuisML67% (3)
- Silabo Cálculo I Fii 2023-IДокумент7 страницSilabo Cálculo I Fii 2023-IMegan Espinoza LunaОценок пока нет
- Tareas Diagnósticas y Nivelación Formativa 3ero BGUДокумент15 страницTareas Diagnósticas y Nivelación Formativa 3ero BGUWillingtonRamirezPaleОценок пока нет
- MA459 - PC1 - Clase IntegralДокумент5 страницMA459 - PC1 - Clase Integraljada 2606Оценок пока нет
- Definiciones de Distintos Tipos de Sistemas MatematicosДокумент21 страницаDefiniciones de Distintos Tipos de Sistemas MatematicosAugusto LismayesОценок пока нет
- PORT PA Cristhian QuirozДокумент178 страницPORT PA Cristhian QuirozDaniel Alejandro Mendoza GomezОценок пока нет
- Guía Del Estudiante Módulo 2Документ21 страницаGuía Del Estudiante Módulo 2Pablo Alexis Contreras MolinaОценок пока нет
- 117 121 PDFДокумент5 страниц117 121 PDFmichaelОценок пока нет
- Taller N°1 - C3Документ13 страницTaller N°1 - C3David GuevaraОценок пока нет
- Becerril Espinosa Jose Ventura Probcalcdifint PDFДокумент132 страницыBecerril Espinosa Jose Ventura Probcalcdifint PDFJulio MartínezОценок пока нет
- GUIA de CVV Ejercicios Resueltos y PruestosДокумент37 страницGUIA de CVV Ejercicios Resueltos y PruestosMisti Furioso100% (1)
- Derivadas Resueltas Paso A PasoДокумент22 страницыDerivadas Resueltas Paso A PasoLorena LiОценок пока нет
- Semana 01 S2CДокумент21 страницаSemana 01 S2CDeivy Rick Meza BaquerizoОценок пока нет