Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Cracking The AP Physics C Exam, 2020 Edition Chapter 5 Drill (Answer Key) PDFДокумент9 страницCracking The AP Physics C Exam, 2020 Edition Chapter 5 Drill (Answer Key) PDFFarhaan Qaisar UsmaniОценок пока нет
- OMAE2023-108028 Ahmad Firdaus Tidal Energy Opportunity in Indonesia 2Документ19 страницOMAE2023-108028 Ahmad Firdaus Tidal Energy Opportunity in Indonesia 2amfОценок пока нет
- FRICTIONДокумент45 страницFRICTIONAllyn AntionОценок пока нет
- Smart Power Generation by Wasted HeatДокумент5 страницSmart Power Generation by Wasted HeatVedant ChoudharyОценок пока нет
- Manual PDFДокумент750 страницManual PDFTRONGОценок пока нет
- 19 in Game King Plus SpecsДокумент7 страниц19 in Game King Plus SpecsElvisОценок пока нет
- General Organic and Biological Chemistry Structures of Life 5th Edition Timberlake Test BankДокумент9 страницGeneral Organic and Biological Chemistry Structures of Life 5th Edition Timberlake Test Bankjenniferedwardsmpnidwyjkb100% (44)
- Design of Electrical MachinesДокумент27 страницDesign of Electrical MachinesAnaZanattaОценок пока нет
- Math Seminar 2022Документ9 страницMath Seminar 2022Joefoe JalandoniОценок пока нет
- WengelerCoating and Drying Processes For Functional Films in Polymer Solar CellsДокумент242 страницыWengelerCoating and Drying Processes For Functional Films in Polymer Solar CellsOussama El BouadiОценок пока нет
- Performance Analysis of Multilevel Inverter Using Matlab/SimulinkДокумент63 страницыPerformance Analysis of Multilevel Inverter Using Matlab/Simulinkvinayak jith100% (1)
- 123 KV Dry Flexible Termination TFD 123: Cable Accessories and ConnectorsДокумент2 страницы123 KV Dry Flexible Termination TFD 123: Cable Accessories and ConnectorsnarinderОценок пока нет
- DNW Steel PlantДокумент54 страницыDNW Steel Plantmosesprasanthjoy0% (2)
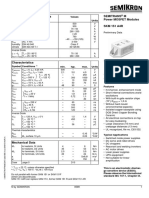
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RДокумент5 страницAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Solar EnergyДокумент8 страницSolar EnergyftahОценок пока нет
- Quiz 4-1Документ4 страницыQuiz 4-1boj VillanuevaОценок пока нет
- Thermal Performance of A Micro Combustor With Heat RecirculationДокумент10 страницThermal Performance of A Micro Combustor With Heat RecirculationHERDI SUTANTOОценок пока нет
- XQ1475 Lehx0010 01Документ8 страницXQ1475 Lehx0010 01gsantosh06Оценок пока нет
- Electrostatics Summary PDFДокумент10 страницElectrostatics Summary PDFKaushal kumarОценок пока нет
- TechdataДокумент2 страницыTechdataDanny ChachaОценок пока нет
- AP Transco Ae Electricalengineering Questionpaper 2014Документ14 страницAP Transco Ae Electricalengineering Questionpaper 2014hari gannarapuОценок пока нет
- LM1575, LM2575-N, LM2575HVДокумент41 страницаLM1575, LM2575-N, LM2575HVAlfredo Valencia RodriguezОценок пока нет
- Electrical System A40F Copy Prosis - 3.4.0.12Документ857 страницElectrical System A40F Copy Prosis - 3.4.0.12Bontor Tua100% (3)
- Design of Reliable High Voltage Avalanche Transistor PulsersДокумент3 страницыDesign of Reliable High Voltage Avalanche Transistor Pulsersapchar1Оценок пока нет
- E&I QAP's - Submitted To Contractor HZAДокумент33 страницыE&I QAP's - Submitted To Contractor HZASuraj ShettyОценок пока нет
- Thermowell PDFДокумент2 страницыThermowell PDFalisuseОценок пока нет
- MOSO Driver 24V 150WДокумент9 страницMOSO Driver 24V 150WMuhammad SholehОценок пока нет
- Revisi AnggaranДокумент11 страницRevisi Anggaranmas udinОценок пока нет
- CZTS Scaps - BДокумент7 страницCZTS Scaps - BMainul HossainОценок пока нет