Вам также может понравиться
- AP8 Porta Pass LogicaДокумент14 страницAP8 Porta Pass LogicaPaulo RogerioОценок пока нет
- 5 - METODOS DE DISCRETIZACaO PDFДокумент6 страниц5 - METODOS DE DISCRETIZACaO PDFPaulo RogerioОценок пока нет
- Eletronica - UnicampДокумент96 страницEletronica - UnicampLorraine Marques CoradiОценок пока нет
- Expressões Básicas em InglesДокумент3 страницыExpressões Básicas em InglesPaulo RogerioОценок пока нет
- Análise de Sistemas Elétricos de Potência 1 (5.0) - Componentes SimétricasДокумент23 страницыAnálise de Sistemas Elétricos de Potência 1 (5.0) - Componentes SimétricasPaulo RogerioОценок пока нет
- Transform de Similaridade PDFДокумент25 страницTransform de Similaridade PDFPaulo RogerioОценок пока нет
- Analise Vetorial 2Документ8 страницAnalise Vetorial 2José Felipe De AlmeidaОценок пока нет
- Relatório SociologiaДокумент3 страницыRelatório SociologiaPaulo RogerioОценок пока нет
- Transf2D 2013Документ29 страницTransf2D 2013Paulo RogerioОценок пока нет
- Questões Resolução e Fotos Pré Enem Clarice e IsabelДокумент27 страницQuestões Resolução e Fotos Pré Enem Clarice e IsabelPaulo RogerioОценок пока нет
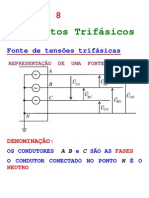
- Sistemas TrifásicosДокумент35 страницSistemas Trifásicospretti_vovo1541Оценок пока нет
- Entrevistas ProfissionaisДокумент11 страницEntrevistas ProfissionaisGilcilene SantosОценок пока нет
- Curso de PIC Da Labtools - Mosaico Didactic DivisionДокумент48 страницCurso de PIC Da Labtools - Mosaico Didactic DivisionNando100% (1)
- Ebookforex PDFДокумент3 страницыEbookforex PDFmarcosmcd1Оценок пока нет
- Ren 572-2013 - TseeДокумент6 страницRen 572-2013 - TseePaulo RogerioОценок пока нет
- ReadmeДокумент1 страницаReadmeRíminni LavieriОценок пока нет
- Prefixos e Sufixos PDFДокумент9 страницPrefixos e Sufixos PDFPaulo RogerioОценок пока нет
- Entrevistas ProfissionaisДокумент11 страницEntrevistas ProfissionaisGilcilene SantosОценок пока нет
- Transf FourierДокумент17 страницTransf FourierMauricio FisztОценок пока нет
- Celula de Carga PDFДокумент159 страницCelula de Carga PDFFabiano BertucheОценок пока нет
- Velas JaponesasДокумент4 страницыVelas JaponesasPaulo RogerioОценок пока нет
- 4-SistContModerno Aula4 AdaptativoДокумент9 страниц4-SistContModerno Aula4 AdaptativoPaulo RogerioОценок пока нет
- Tabela Ascii COMPLETAДокумент7 страницTabela Ascii COMPLETAVictor HugoОценок пока нет
- Medidas de DispersaoДокумент19 страницMedidas de DispersaoheitormartОценок пока нет
- Tabela Ascii COMPLETAДокумент7 страницTabela Ascii COMPLETAVictor HugoОценок пока нет
- 03 Amplificadores OperacionaisДокумент10 страниц03 Amplificadores OperacionaisPaulo RogerioОценок пока нет
- 004 MaláriaДокумент31 страница004 MaláriaPaulo RogerioОценок пока нет
- Transformadores: introdução e princípios básicosДокумент19 страницTransformadores: introdução e princípios básicosPaulo RogerioОценок пока нет
- Análise de circuitos com dois Transistores em cascataДокумент22 страницыAnálise de circuitos com dois Transistores em cascataPaulo Rogerio0% (1)
- Apresentaçao Ciencias Dos MateriaisДокумент10 страницApresentaçao Ciencias Dos MateriaisAndrielly CarolineОценок пока нет
- 10 - A+º+úo de Indeniza+º+úo Erro M+®dico - Cumulada Danos Morais e Est+®ticos - Responsabilidade CivilДокумент14 страниц10 - A+º+úo de Indeniza+º+úo Erro M+®dico - Cumulada Danos Morais e Est+®ticos - Responsabilidade CivilCamila PinheiroОценок пока нет
- Prova - Cfs 1 2021 - Cod - 33Документ28 страницProva - Cfs 1 2021 - Cod - 33Desqueronee XesqueroneeОценок пока нет
- Darwin, mente e significado: análise críticaДокумент12 страницDarwin, mente e significado: análise críticajose.costajunior100% (1)
- Slide Cálculos Químicos e EstequiométricosДокумент44 страницыSlide Cálculos Químicos e Estequiométricoslidiacarolineferreira.silva2Оценок пока нет
- Rafael Luglio Guedes DEFINITIVO 3105Документ68 страницRafael Luglio Guedes DEFINITIVO 3105rafael guedesОценок пока нет
- Exercício Avaliativo I - EmpreendedorismoДокумент2 страницыExercício Avaliativo I - EmpreendedorismoPaulo SérgioОценок пока нет
- Processo Justo e Contraditório Dinamico - Humberto Theodoro JúniorДокумент8 страницProcesso Justo e Contraditório Dinamico - Humberto Theodoro JúniorAlfredo José ScОценок пока нет
- Continuidade dos Parques - ResumoДокумент1 страницаContinuidade dos Parques - ResumoCesar SinicioОценок пока нет
- Manual Dos Exames CardíacosДокумент45 страницManual Dos Exames CardíacosMatheus BaraldiОценок пока нет
- Resolução de problemas de funções e logaritmosДокумент61 страницаResolução de problemas de funções e logaritmosEdielson HernandesОценок пока нет
- Document 46328 1Документ444 страницыDocument 46328 1Chirley SilvaОценок пока нет
- Bilhete Aos Responsáveis - Baixo Rendimento em AvaliaçãoДокумент2 страницыBilhete Aos Responsáveis - Baixo Rendimento em AvaliaçãoAline Moraes AlbertoОценок пока нет
- Cravo Da Índia - Seus Poderes Mágicos - Oficina PDFДокумент4 страницыCravo Da Índia - Seus Poderes Mágicos - Oficina PDFElton Castorino100% (2)
- Porquinho Da ÍndiaДокумент6 страницPorquinho Da ÍndiaÉVELYN SANTOS DE OLIVEIRAОценок пока нет
- Origens e sentidos dos mitos na filosofiaДокумент31 страницаOrigens e sentidos dos mitos na filosofiaJosevandro ChagasОценок пока нет
- Práticas baseadas em evidências na PsicologiaДокумент27 страницPráticas baseadas em evidências na PsicologiaChristiano RodriguesОценок пока нет
- ABC Da Avaliação Da PG em EducaçãoДокумент16 страницABC Da Avaliação Da PG em EducaçãoSheila CaetanoОценок пока нет
- Exercícios resolvidos de juros simples e compostosДокумент3 страницыExercícios resolvidos de juros simples e compostosAnonymous CZhW58yH0100% (2)
- Ctic9 - MC - E3 - Geral DigestãoДокумент1 страницаCtic9 - MC - E3 - Geral DigestãoSilvinhoCostaОценок пока нет
- Direito Romano: Introdução, Conceitos e DivisãoДокумент34 страницыDireito Romano: Introdução, Conceitos e DivisãoMarthaOliveiraОценок пока нет
- Guia Do Programador Joel SaadeДокумент9 страницGuia Do Programador Joel SaadeWellington José CavalcantiОценок пока нет
- Resumo - HISTÓRIA DA PSICANÁLISE Parte II Vol II FreudДокумент7 страницResumo - HISTÓRIA DA PSICANÁLISE Parte II Vol II Freuddanielvianaferreira671Оценок пока нет
- CoRolla 1.8Документ2 страницыCoRolla 1.8Jose Graciano SouzaОценок пока нет
- Livro Sistemas BiologicosДокумент133 страницыLivro Sistemas BiologicosJESSICA FERNANDES REGUERA RUIZ100% (1)
- Alimentos limpos e impuros segundo a BíbliaДокумент10 страницAlimentos limpos e impuros segundo a BíbliaWeldner CeccatoОценок пока нет
- Regulamenta queima controlada e solidáriaДокумент5 страницRegulamenta queima controlada e solidáriaAldemir AlmirОценок пока нет
- Restauração Da Alma 2Документ4 страницыRestauração Da Alma 2Micael RodriguesОценок пока нет
- 7 ErrosДокумент20 страниц7 Errosrenatamruiz100% (3)
- Equinócios e PáscoasДокумент78 страницEquinócios e PáscoasMário Renato MarianoОценок пока нет