Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Fabrication of Unconventional Compressor For Heavy Truck (Demo Model)Документ8 страницFabrication of Unconventional Compressor For Heavy Truck (Demo Model)vijayant gautamОценок пока нет
- ProjectДокумент25 страницProject9897856218Оценок пока нет
- 250+ Electronics Mini Projects Ideas For Engineering Students PDFДокумент26 страниц250+ Electronics Mini Projects Ideas For Engineering Students PDFsumit valsangkar100% (1)
- 250+ Electronics Mini Projects Ideas For Engineering Students PDFДокумент26 страниц250+ Electronics Mini Projects Ideas For Engineering Students PDFsumit valsangkarОценок пока нет
- Final ProjectДокумент27 страницFinal ProjectMohit KeshriОценок пока нет
- Water Level Controller Using 8051 MicrocontrollerДокумент15 страницWater Level Controller Using 8051 MicrocontrollerKeshav AroraОценок пока нет
- Kraig 106Документ14 страницKraig 106Sudhir ImperfectОценок пока нет
- Development of PWM Based Speed Controller For DC MotorДокумент23 страницыDevelopment of PWM Based Speed Controller For DC MotorBaldha JayvantОценок пока нет
- Speed Control of 3Ø AC Induction Motor Using VSI & MicrocontrollerДокумент32 страницыSpeed Control of 3Ø AC Induction Motor Using VSI & MicrocontrollerVijay PrabhuОценок пока нет
- Chapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Документ63 страницыChapter No.:-01 Introuuction: Pulse-Width Modulation (PWM), Modulation (PDM)Pooja BanОценок пока нет
- Ac Voltage Controller Using Thyristor Project Report by SandeepДокумент29 страницAc Voltage Controller Using Thyristor Project Report by SandeepSANDEEP DHANDA100% (1)
- Clap Switch Circuit With MelodyДокумент6 страницClap Switch Circuit With MelodyammarОценок пока нет
- 50 Watt Small Homemade InverterДокумент25 страниц50 Watt Small Homemade InverterMarlon CarinoОценок пока нет
- Stepper Motor Control Through RF LinkДокумент12 страницStepper Motor Control Through RF Linkmrx1061100% (1)
- Neural Network Based Speed Control of Induction MotorДокумент6 страницNeural Network Based Speed Control of Induction MotorRohit AswarОценок пока нет
- Experiment 6: Motor Speed Control: ErratumДокумент5 страницExperiment 6: Motor Speed Control: ErratumBambang PrasetyoОценок пока нет
- PW M Generator Curso e Faça Voce MesmoДокумент6 страницPW M Generator Curso e Faça Voce MesmoEcoteck TécnicaОценок пока нет
- Opto CouplerДокумент11 страницOpto CouplerRey GonzalesОценок пока нет
- Capacitor ESR MeterДокумент2 страницыCapacitor ESR MeterMarkoОценок пока нет
- Aux Winding and PMGДокумент7 страницAux Winding and PMGSaravanan Palani100% (2)
- Arduino Driving Power Mosfet uRiZsEVG6kДокумент11 страницArduino Driving Power Mosfet uRiZsEVG6kahas viyanaОценок пока нет
- 345028505-Peralatan-Otomasi-Industri (Autosaved)Документ105 страниц345028505-Peralatan-Otomasi-Industri (Autosaved)16 I Gde Wisnu Kusuma wardanaОценок пока нет
- Preface: Speed Control of DC Motor Using PWM By-Yash DoshiДокумент11 страницPreface: Speed Control of DC Motor Using PWM By-Yash Doshirochmat100% (1)
- AC Light Dimmer Using Arduino and TRIACДокумент5 страницAC Light Dimmer Using Arduino and TRIACsalman100% (1)
- Latest Electrical Motors Questions and AnswersДокумент7 страницLatest Electrical Motors Questions and AnswersInstrumentation ToolsОценок пока нет
- Speed Control of A DC Motor Using Hand GestureДокумент4 страницыSpeed Control of A DC Motor Using Hand GestureArka Prava LahiriОценок пока нет
- An-9019 Motor Drive System Using SPM InverterДокумент25 страницAn-9019 Motor Drive System Using SPM InverterasokanenОценок пока нет
- Vanderbilt University ES 140x EE Introduction To Engineering Electrical Engineering Module Fall 2021Документ3 страницыVanderbilt University ES 140x EE Introduction To Engineering Electrical Engineering Module Fall 2021Siyuan ChenОценок пока нет
- Star Delta ConnectionДокумент57 страницStar Delta ConnectionYaj Perez100% (2)
- The LM324 Quad Op-Amp Line Follower Robot With Pulse Width ModulationДокумент15 страницThe LM324 Quad Op-Amp Line Follower Robot With Pulse Width ModulationMeyersson BeltranОценок пока нет
- Biomedical Monitoring SystemДокумент81 страницаBiomedical Monitoring SystemAmna AamirОценок пока нет
- PWM Using ArduinoДокумент6 страницPWM Using ArduinoJulian David RodriguezОценок пока нет
- Why An Electronic Choke Circuit Diagram Is ImportantДокумент10 страницWhy An Electronic Choke Circuit Diagram Is ImportantjackОценок пока нет
- IC 723 Voltage Regulators - Electronic Circuits and Diagram-Electronics Projects and DesignДокумент7 страницIC 723 Voltage Regulators - Electronic Circuits and Diagram-Electronics Projects and DesignDayanand Gowda KrОценок пока нет
- Er. C.P.Verma Department-Electronics Engg. Harsh Gupta Anil Kumar Verma Pawan Kumar Verma Pankaj Kumar Rahul Kumar YadavДокумент10 страницEr. C.P.Verma Department-Electronics Engg. Harsh Gupta Anil Kumar Verma Pawan Kumar Verma Pankaj Kumar Rahul Kumar YadavPawan VermaОценок пока нет
- Ultra Fast Acting Electronic Circuit BreakerДокумент6 страницUltra Fast Acting Electronic Circuit BreakerHarish Kumar100% (1)
- How To Control Motor Speed With A PWM Circuit: (Article Continued From Previous Page)Документ4 страницыHow To Control Motor Speed With A PWM Circuit: (Article Continued From Previous Page)Ajay S NairОценок пока нет
- Progression Report: Temperature Controlling of The Portable Fridge Via Web ApplicationДокумент5 страницProgression Report: Temperature Controlling of The Portable Fridge Via Web ApplicationHasan ÇalışkanОценок пока нет
- Speed Control of DC Motor Using PWM 555 TimerДокумент20 страницSpeed Control of DC Motor Using PWM 555 TimerDEBABRATA DASОценок пока нет
- CNT 3Документ10 страницCNT 3sara.adnan2013Оценок пока нет
- DC Motor Control Using Arduino: 1) IntroductionДокумент10 страницDC Motor Control Using Arduino: 1) IntroductionSoeAyeОценок пока нет
- PWM - 556Документ2 страницыPWM - 556HaSophim100% (2)
- PCB Project DetailsДокумент4 страницыPCB Project DetailsmohanОценок пока нет
- Simple Pure Sine Wave Inverter Circuit - 500 Watt Pure Sine PDFДокумент22 страницыSimple Pure Sine Wave Inverter Circuit - 500 Watt Pure Sine PDFAnonymous 4YqpgKkSR100% (2)
- Wiring Diagram For Car - Dimmer With A MOSFETДокумент3 страницыWiring Diagram For Car - Dimmer With A MOSFETluisОценок пока нет
- Design and Development of 3 Phase PWM inДокумент4 страницыDesign and Development of 3 Phase PWM inMarc TcheukabaОценок пока нет
- Tuned Collector Oscillator - Electronic Circuits and Diagram-Electronics Projects and DesignДокумент6 страницTuned Collector Oscillator - Electronic Circuits and Diagram-Electronics Projects and DesignSuhaila ctОценок пока нет
- Microcontrollers (MCU) Are Complete Computer Systems On A Chip. They Combine AnДокумент4 страницыMicrocontrollers (MCU) Are Complete Computer Systems On A Chip. They Combine AnSukhveer SinghОценок пока нет
- Schematics and DiagramДокумент67 страницSchematics and DiagramArgel Linard Francisco Mabaga100% (1)
- Solar InvereterДокумент47 страницSolar InvereterReshma RaviОценок пока нет
- Generation of PWM Using Verilog in FPGAДокумент7 страницGeneration of PWM Using Verilog in FPGARajani kant tiwariОценок пока нет
- Generation of PWM Using Verilog in FPGA PDFДокумент7 страницGeneration of PWM Using Verilog in FPGA PDFRajani kant tiwariОценок пока нет
- DTMF Based Prepaid Energy MeterДокумент69 страницDTMF Based Prepaid Energy MeterHemant Patel0% (1)
- What Is The Scope of Electrical EngineeringДокумент9 страницWhat Is The Scope of Electrical EngineeringMahesh NidumoluОценок пока нет
- Ir Remote Based Stepper Motor Control PDFДокумент70 страницIr Remote Based Stepper Motor Control PDFsanoopmk100% (1)
- Direct On Line (DOL) Motor StarterДокумент8 страницDirect On Line (DOL) Motor Startermaruf048100% (1)
- Etco 2017 GRP 8Документ3 страницыEtco 2017 GRP 8RohanОценок пока нет
- SCR - Triac Controlled Automatic Voltage Stabilizer Circuit - Homemade Circuit ProjectsДокумент25 страницSCR - Triac Controlled Automatic Voltage Stabilizer Circuit - Homemade Circuit ProjectsANKUR RATHIОценок пока нет
- SolidWorks Motion Study TutorialДокумент37 страницSolidWorks Motion Study TutorialwawanUAIОценок пока нет
- Transient Analysis Using LtspiceДокумент9 страницTransient Analysis Using Ltspiceapi-243810683Оценок пока нет
- Actuadores Woodward Serie LДокумент133 страницыActuadores Woodward Serie LPablo Oscar GrekОценок пока нет
- Computer Modeling of Electronic Circuits With LT: SpiceДокумент30 страницComputer Modeling of Electronic Circuits With LT: SpicewawanUAIОценок пока нет
- 1 - Introducing The GEK Gasifier Systems - Rev5 PDFДокумент7 страниц1 - Introducing The GEK Gasifier Systems - Rev5 PDFwawanUAIОценок пока нет
- Walter A. Triebel, Avtar Singh-The Lab Manual For 8088 and 8086 Microprocessors - Programming, Interfacing, Software, Hardware, and Applications, 4th Edition-Prentice Hall (2002)Документ188 страницWalter A. Triebel, Avtar Singh-The Lab Manual For 8088 and 8086 Microprocessors - Programming, Interfacing, Software, Hardware, and Applications, 4th Edition-Prentice Hall (2002)Remo Romeo50% (2)
- 2 - PowerPallet Operation Manual - 1020 - Rev3Документ6 страниц2 - PowerPallet Operation Manual - 1020 - Rev3wawanUAIОценок пока нет
- GM - PSI 3.0L Engine Service Manual PDFДокумент188 страницGM - PSI 3.0L Engine Service Manual PDFGuadalupe Guerrero100% (3)
- ALL Power Labs GCU Manual: Hardware Version 3.01 Draft Revision 0.6 G. Homsy 6 December, 2009Документ29 страницALL Power Labs GCU Manual: Hardware Version 3.01 Draft Revision 0.6 G. Homsy 6 December, 2009wawanUAIОценок пока нет
- CamStudio PDFДокумент18 страницCamStudio PDFRBJОценок пока нет
- Features: Precision 1:8 LVPECL Fanout Buffer With On-Chip Input TerminationДокумент25 страницFeatures: Precision 1:8 LVPECL Fanout Buffer With On-Chip Input TerminationwawanUAIОценок пока нет
- Mach 3 MillДокумент157 страницMach 3 Millafricano333100% (1)
- Signal Types and TerminationsДокумент6 страницSignal Types and TerminationswawanUAIОценок пока нет
- ECE480 Team7 Final ReportДокумент53 страницыECE480 Team7 Final ReportRicha SharmaОценок пока нет
- Communication Appinventor ArduinoДокумент10 страницCommunication Appinventor ArduinowawanUAIОценок пока нет
- CamStudio PDFДокумент18 страницCamStudio PDFRBJОценок пока нет
- ESP8266-12 Blynk Wireless Temperature, Humidity DHT22 Sensor - 5 StepsДокумент11 страницESP8266-12 Blynk Wireless Temperature, Humidity DHT22 Sensor - 5 StepswawanUAIОценок пока нет
- Camara - OV7670Документ30 страницCamara - OV7670Carlos Oreza SanzОценок пока нет
- Bascom AvrДокумент2 страницыBascom AvrwawanUAIОценок пока нет
- Design and Simulation of Interconnected H-Bridge InverterДокумент35 страницDesign and Simulation of Interconnected H-Bridge InverterwawanUAIОценок пока нет
- Camara - OV7670Документ30 страницCamara - OV7670Carlos Oreza SanzОценок пока нет
- ESP8266 - Web Server and Connected DevicesДокумент12 страницESP8266 - Web Server and Connected DeviceswawanUAI100% (1)
- Usi I2c Slave For Attiny Cpus - Avr FreaksДокумент3 страницыUsi I2c Slave For Attiny Cpus - Avr FreakswawanUAIОценок пока нет
- ATmega328P ATMEL PDFДокумент444 страницыATmega328P ATMEL PDFakhil rajОценок пока нет
- ASEECircuitAnalysis in MATLAB and Simulink PDFДокумент12 страницASEECircuitAnalysis in MATLAB and Simulink PDFSuriyachakArchwichaiОценок пока нет
- GAL 16V8 Basic LogicДокумент3 страницыGAL 16V8 Basic LogicwawanUAIОценок пока нет
- Atmel 2561 Using The Usi Module As A I2c Master AP Note Avr310Документ11 страницAtmel 2561 Using The Usi Module As A I2c Master AP Note Avr310wawanUAIОценок пока нет
- Tiny2313 and Twi - AVR FreaksДокумент12 страницTiny2313 and Twi - AVR FreakswawanUAIОценок пока нет
- Tuesday 3.1.1 1.00 PM 10712 TontiДокумент38 страницTuesday 3.1.1 1.00 PM 10712 TontiDarshan PatelОценок пока нет
- A Robust Fuzzy-Based Control Technique For Grid-Connected Operation of Sensor-Less PUC5 InverterДокумент5 страницA Robust Fuzzy-Based Control Technique For Grid-Connected Operation of Sensor-Less PUC5 Inverterknighthood4allОценок пока нет
- Data0305 MX485netДокумент3 страницыData0305 MX485netAbdelhamid SammoudiОценок пока нет
- How Ethernet WorksДокумент9 страницHow Ethernet Worksashish10mayОценок пока нет
- Transport Layer IssuesДокумент19 страницTransport Layer IssuesDarpan SharmaОценок пока нет
- The Network Core: - Mesh of Interconnected RoutersДокумент42 страницыThe Network Core: - Mesh of Interconnected RoutersĐào Quỳnh NhưОценок пока нет
- Main and Backup LoadersДокумент7 страницMain and Backup LoadersVlăduț Butnaru /Student50% (2)
- Soldier Tracking and Health Monitoring SystemДокумент18 страницSoldier Tracking and Health Monitoring SystemKavana K GowdaОценок пока нет
- ValereVrectifierDataSheet0404 Hoja Tec V2500Документ8 страницValereVrectifierDataSheet0404 Hoja Tec V2500Carlos SalazarОценок пока нет
- USSD Call Flows PDFДокумент2 страницыUSSD Call Flows PDFAntariksha SinghОценок пока нет
- Twin Beam Base Station AntennasДокумент2 страницыTwin Beam Base Station Antennasnahuan_mata100% (1)
- ECE 151 Syllabus AY1819s2Документ2 страницыECE 151 Syllabus AY1819s2AntonОценок пока нет
- Proportional Amplifier Type EV2S: Product DocumentationДокумент29 страницProportional Amplifier Type EV2S: Product DocumentationAsa ReidОценок пока нет
- 7inch HDMI LCD (B) User ManualДокумент9 страниц7inch HDMI LCD (B) User ManualPerez GeovanniОценок пока нет
- Huawei Videoconferencing HD Endpoint TE40 Datasheet PDFДокумент2 страницыHuawei Videoconferencing HD Endpoint TE40 Datasheet PDFnuttylОценок пока нет
- LM117/217 LM317: 1.2V To 37V Voltage RegulatorДокумент11 страницLM117/217 LM317: 1.2V To 37V Voltage RegulatorchzelОценок пока нет
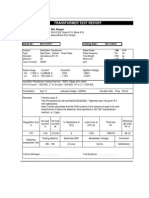
- X-Former Test Report For 100kVAДокумент3 страницыX-Former Test Report For 100kVAnisargo0% (1)
- OB2273A On BrightДокумент10 страницOB2273A On BrightHamza Abbasi AbbasiОценок пока нет
- ulvwldq $GDQ 0Hqgr) D +huqdqg H) : Introduccion A La Operación Y Mantenimiento de Siu-02Документ39 страницulvwldq $GDQ 0Hqgr) D +huqdqg H) : Introduccion A La Operación Y Mantenimiento de Siu-02Wilson DiazОценок пока нет
- Yamaha HTR5790 AV Receiver - Service Manual PDFДокумент41 страницаYamaha HTR5790 AV Receiver - Service Manual PDFChris SmithОценок пока нет
- Automotive MCU Overview - 2012 ApДокумент83 страницыAutomotive MCU Overview - 2012 ApJoseph KymmОценок пока нет
- CMC-Testing of Restricted Earth Fault Protection With OMICRON Advanced DifferentialДокумент12 страницCMC-Testing of Restricted Earth Fault Protection With OMICRON Advanced Differentialskylimit.skylimit100% (4)
- TA2512 Manual PDFДокумент2 страницыTA2512 Manual PDFMariaОценок пока нет
- Astra 1H: Frequency Plan Ku-Band UplinkДокумент2 страницыAstra 1H: Frequency Plan Ku-Band UplinkWan Wan SetyawanОценок пока нет
- Summary DRM TSSR Survey - 020408Документ10 страницSummary DRM TSSR Survey - 020408Anonymous k80dHiDfuОценок пока нет
- ProFX4v2 8v2 12v2 16v2 22v2 30v2 SSДокумент12 страницProFX4v2 8v2 12v2 16v2 22v2 30v2 SSÉrika SalesОценок пока нет
- Scier Entechllearning: Logic GatesДокумент1 страницаScier Entechllearning: Logic GatesTarangОценок пока нет
- 4100-0304, - 1291 Remote Unit Interface Installation InstructionsДокумент22 страницы4100-0304, - 1291 Remote Unit Interface Installation Instructionswilliam jovelОценок пока нет
- Avro Elec DWG No.01 SLD For SPP6-400A Rev00 PDFДокумент1 страницаAvro Elec DWG No.01 SLD For SPP6-400A Rev00 PDFKaywan ZuherОценок пока нет
- Hai1000 UG VL740 03 UsermanualДокумент246 страницHai1000 UG VL740 03 UsermanualRobertОценок пока нет