Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Dupont Nutrition Newark Delaware USA SGSДокумент1 страницаDupont Nutrition Newark Delaware USA SGSAbhishek VermaОценок пока нет
- 'Docslide - Us - Case Pricing Options AtlanticДокумент6 страниц'Docslide - Us - Case Pricing Options AtlanticAbhishek VermaОценок пока нет
- State Services Preliminery - 2012 HHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHДокумент48 страницState Services Preliminery - 2012 HHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHHSushant SurveОценок пока нет
- SNAP 2009 Question Paper With Answer KeyДокумент17 страницSNAP 2009 Question Paper With Answer KeyAbhishek VermaОценок пока нет
- On-Line Next Best Grasp Selection For In-Hand Object 3D Modeling With Dual-Arm CoordinationДокумент6 страницOn-Line Next Best Grasp Selection For In-Hand Object 3D Modeling With Dual-Arm CoordinationAbhishek VermaОценок пока нет
- Gigu HandДокумент8 страницGigu HandAbhishek VermaОценок пока нет
- Dist HandДокумент2 страницыDist HandAbhishek VermaОценок пока нет
- IIFT 2008 Question Paper With Answer KeyДокумент36 страницIIFT 2008 Question Paper With Answer KeyAbhishek VermaОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- TCE BE EEE RulesandRegulationsДокумент509 страницTCE BE EEE RulesandRegulationsAplieОценок пока нет
- G 342 Engine Part 1 PDFДокумент26 страницG 342 Engine Part 1 PDFharley florezОценок пока нет
- Density and Concentration Transmitter: Installation GuideДокумент40 страницDensity and Concentration Transmitter: Installation GuideOmid GhОценок пока нет
- Cambridge Ordinary LevelДокумент4 страницыCambridge Ordinary LevelHaziq AfzalОценок пока нет
- Seminar ReportДокумент27 страницSeminar ReportnitinОценок пока нет
- Homework 1Документ3 страницыHomework 1Bukhosi MsimangaОценок пока нет
- XMEye Android User ManualДокумент32 страницыXMEye Android User Manualaxelkal ck50% (2)
- MSDS Argon Compressed GasДокумент6 страницMSDS Argon Compressed Gassajid aliОценок пока нет
- TechTrax 09 2003 ScreenReaderVersionДокумент84 страницыTechTrax 09 2003 ScreenReaderVersionMCKINNONBОценок пока нет
- Environmental Education Through Art PDFДокумент27 страницEnvironmental Education Through Art PDFCeci_SunshineОценок пока нет
- Eaturing: To Smaller Recording Performance Speakers: - The GuideДокумент76 страницEaturing: To Smaller Recording Performance Speakers: - The GuideMatthew WalkerОценок пока нет
- Chopra Scm5 Ch13Документ58 страницChopra Scm5 Ch13Faried Putra SandiantoОценок пока нет
- Silver Nano ParticleДокумент70 страницSilver Nano Particleasad ullah100% (1)
- IJV MARLEY AutomotiveДокумент6 страницIJV MARLEY AutomotiveUmer HamidОценок пока нет
- Fingerstyle Guitar - Fingerpicking Patterns and ExercisesДокумент42 страницыFingerstyle Guitar - Fingerpicking Patterns and ExercisesSeminario Lipa100% (6)
- Technical Service Bulletin 6.7L - Illuminated Mil With Dtcs P1291, P1292, P0191 And/Or P06A6 - Engine Harness Chafe 19-2231Документ4 страницыTechnical Service Bulletin 6.7L - Illuminated Mil With Dtcs P1291, P1292, P0191 And/Or P06A6 - Engine Harness Chafe 19-2231Yaniss AlgeriaОценок пока нет
- Life-Saving Rules: Tool Box Talk SeriesДокумент86 страницLife-Saving Rules: Tool Box Talk SeriesSalahBouzianeОценок пока нет
- Computer Network-II Lab ProgramsДокумент5 страницComputer Network-II Lab ProgramsAnshul ChauhanОценок пока нет
- Chapter 4 (Digital Modulation) - Review: Pulses - PAM, PWM, PPM Binary - Ask, FSK, PSK, BPSK, DBPSK, PCM, QamДокумент7 страницChapter 4 (Digital Modulation) - Review: Pulses - PAM, PWM, PPM Binary - Ask, FSK, PSK, BPSK, DBPSK, PCM, QamMuhamad FuadОценок пока нет
- Series: 25 TON (222 KN)Документ2 страницыSeries: 25 TON (222 KN)Marius IlcaОценок пока нет
- Job Description - NOC EngineerДокумент2 страницыJob Description - NOC EngineerMd ShujauddinОценок пока нет
- DepEd Learner Information System (LIS) PDFДокумент36 страницDepEd Learner Information System (LIS) PDFshasagailОценок пока нет
- IRGC (2021) - Spotlight - Risk Governance and The Rise of DeepfakesДокумент4 страницыIRGC (2021) - Spotlight - Risk Governance and The Rise of DeepfakessaidОценок пока нет
- PrePeg XC110 210g 450gДокумент3 страницыPrePeg XC110 210g 450gPrakashChouhanОценок пока нет
- Know The Escalation Matrix To ReportДокумент1 страницаKnow The Escalation Matrix To ReportHemal GandhiОценок пока нет
- QR 390 Manual Partes Quincy 390Документ31 страницаQR 390 Manual Partes Quincy 390ramiro alvarezОценок пока нет
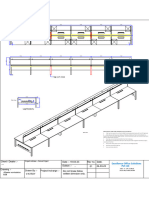
- 6seater Workstation B2BДокумент1 страница6seater Workstation B2BDid ProjectsОценок пока нет
- Abstract Superstructure Conc - Frame WestgateДокумент2 страницыAbstract Superstructure Conc - Frame WestgateTashamiswa MajachaniОценок пока нет
- SMA Inverter Catalogue PDFДокумент290 страницSMA Inverter Catalogue PDFxodewaОценок пока нет