Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
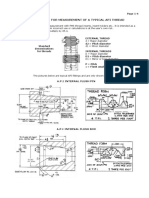
- API Thread Measurement PDFДокумент4 страницыAPI Thread Measurement PDFDarkedge100% (1)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 3453 Brochure Amphibious Excavator Mrt2019 LR DEF MinДокумент12 страниц3453 Brochure Amphibious Excavator Mrt2019 LR DEF MinDarkedgeОценок пока нет
- Introduction to Nanorobotics and Their ApplicationsДокумент25 страницIntroduction to Nanorobotics and Their ApplicationsSharifa RahamadullahОценок пока нет
- Avr GeneralДокумент67 страницAvr GeneralRukma Goud Shakkari100% (2)
- Revised Design Report of Jetty 06.04.2014Документ10 страницRevised Design Report of Jetty 06.04.2014Priodeep Chowdhury100% (2)
- Best Book of Mathematics For All Copetitive ExamsДокумент407 страницBest Book of Mathematics For All Copetitive ExamsMuhammad IshtiaqОценок пока нет
- Waste Incineration Insert v2Документ2 страницыWaste Incineration Insert v2Namik HadziibrahimovicОценок пока нет
- Tables - TechnicalProperties - EN 10088 PDFДокумент24 страницыTables - TechnicalProperties - EN 10088 PDFeugenio.gutenbertОценок пока нет
- Port Solenoid ValveДокумент40 страницPort Solenoid ValveDarkedgeОценок пока нет
- Acronyms Used in The Oil & Gas IndustryДокумент48 страницAcronyms Used in The Oil & Gas IndustryharoldalconzОценок пока нет
- EHYDF2 Hydraulic Filtration CAT2300-13 HP2 PDFДокумент10 страницEHYDF2 Hydraulic Filtration CAT2300-13 HP2 PDFDarkedgeОценок пока нет
- EHYDF2 Hydraulic Filtration CAT2300-13 HP2 PDFДокумент10 страницEHYDF2 Hydraulic Filtration CAT2300-13 HP2 PDFDarkedgeОценок пока нет
- Models 509 / 709 / 809: Welded Design DilemaДокумент4 страницыModels 509 / 709 / 809: Welded Design DilemaDarkedgeОценок пока нет
- Groupe Automobile Jeandot - Wrangler-448Документ1 страницаGroupe Automobile Jeandot - Wrangler-448DarkedgeОценок пока нет
- EHYDF2 Hydraulic Filtration CAT2300-13 HP2 PDFДокумент10 страницEHYDF2 Hydraulic Filtration CAT2300-13 HP2 PDFDarkedgeОценок пока нет
- 98 DSX 09 DДокумент4 страницы98 DSX 09 DDarkedgeОценок пока нет
- 81 AELw Ce 6 W LДокумент28 страниц81 AELw Ce 6 W LDarkedgeОценок пока нет
- VTV16L3Z PDFДокумент1 страницаVTV16L3Z PDFDarkedgeОценок пока нет
- The Ultimate Guide to Cooking PanzanellaДокумент3 страницыThe Ultimate Guide to Cooking PanzanellaDarkedgeОценок пока нет
- Extension de La Vida de Los Drill PipeДокумент5 страницExtension de La Vida de Los Drill PipeRichard More LeonОценок пока нет
- Koki's Guide to Effective CommunicationДокумент1 страницаKoki's Guide to Effective CommunicationDarkedgeОценок пока нет
- Datenblatt Rohstoff Torlon 4301Документ4 страницыDatenblatt Rohstoff Torlon 4301DarkedgeОценок пока нет
- Titanium Grade 5 ASTM B 265 / 348Документ2 страницыTitanium Grade 5 ASTM B 265 / 348DarkedgeОценок пока нет
- Gravograph AF5 PDFДокумент12 страницGravograph AF5 PDFDarkedgeОценок пока нет
- Gravograph AF5Документ12 страницGravograph AF5Darkedge0% (1)
- FG HLB 800 Pdsusa110117Документ2 страницыFG HLB 800 Pdsusa110117DarkedgeОценок пока нет
- FG HLB 800 Pdsusa110117Документ2 страницыFG HLB 800 Pdsusa110117DarkedgeОценок пока нет
- CPR Dop 100010040 hlb800 Slabs enДокумент1 страницаCPR Dop 100010040 hlb800 Slabs enDarkedgeОценок пока нет
- FG HLB 800 Pdsusa110117Документ2 страницыFG HLB 800 Pdsusa110117DarkedgeОценок пока нет
- FG HLB 800 Pdsusa110117Документ2 страницыFG HLB 800 Pdsusa110117DarkedgeОценок пока нет
- FG HLB 800 Pdsusa110117Документ2 страницыFG HLB 800 Pdsusa110117DarkedgeОценок пока нет
- CPR Dop 100010040 hlb800 Slabs enДокумент1 страницаCPR Dop 100010040 hlb800 Slabs enDarkedgeОценок пока нет
- Plaque TteДокумент2 страницыPlaque TteDarkedgeОценок пока нет
- Original Original Low Temp Sealing CapabilityДокумент17 страницOriginal Original Low Temp Sealing CapabilityDarkedgeОценок пока нет
- Acceleration (Inclined Plane)Документ5 страницAcceleration (Inclined Plane)jambunaОценок пока нет
- Machine Design: The Hidden Cause ofДокумент6 страницMachine Design: The Hidden Cause ofbbmokshОценок пока нет
- FDG Production-Theory Operations-FDG Synthesis Chemistr1Документ25 страницFDG Production-Theory Operations-FDG Synthesis Chemistr1Cesar Adolfo SanchezОценок пока нет
- Java Meets Numerical AnalysisДокумент2 страницыJava Meets Numerical AnalysisbernasekОценок пока нет
- Pivot Interactives Motion Graphing A Dry Ice Puck On A RampДокумент2 страницыPivot Interactives Motion Graphing A Dry Ice Puck On A RampSophia0% (1)
- Adrian Stan MFQMCourseHsL2006Документ60 страницAdrian Stan MFQMCourseHsL2006禿公Оценок пока нет
- Phased Array Probes and Wedges: Probe CatalogДокумент3 страницыPhased Array Probes and Wedges: Probe CatalogDavidMontillaОценок пока нет
- DPP-3 Jee PDFДокумент10 страницDPP-3 Jee PDFTanmay SagarОценок пока нет
- Lightning Protection Systems Advantages and DisadvantagesДокумент11 страницLightning Protection Systems Advantages and DisadvantagesRamiro Magbanua FelicianoОценок пока нет
- HW2 Solutions FinalДокумент5 страницHW2 Solutions Finalpande_100Оценок пока нет
- SMS LteaДокумент11 страницSMS LteaArdi CikaОценок пока нет
- Electrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room TemperatureДокумент6 страницElectrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room Temperaturereza mirzakhaniОценок пока нет
- Ashish PPT 2Документ9 страницAshish PPT 2Ankit JaglanОценок пока нет
- Final PPT 3rd SemДокумент16 страницFinal PPT 3rd SemmonuОценок пока нет
- Newton's Laws of Motion Worksheet.Документ2 страницыNewton's Laws of Motion Worksheet.Llama jennerОценок пока нет
- The Second Term Exam of EnglishДокумент2 страницыThe Second Term Exam of Englishsof chimiste100% (1)
- Heat ActivityДокумент3 страницыHeat ActivityMG Untalan Bauzon0% (1)
- GX200 AdjДокумент1 страницаGX200 AdjAngelescuOОценок пока нет
- Numerical Exploration of The Dang Van High Cycle FДокумент18 страницNumerical Exploration of The Dang Van High Cycle FHsan HaddarОценок пока нет
- Activity MergedДокумент9 страницActivity MergedSoham MondalОценок пока нет
- Ferroresonance During Single-Phase Switching of Distribution TransformersДокумент6 страницFerroresonance During Single-Phase Switching of Distribution TransformersDiego Betancourt MejiaОценок пока нет
- EVER11 Final ProgramДокумент20 страницEVER11 Final ProgramAdrian PopОценок пока нет
- Atomic absorption spectroscopy analysis of metalsДокумент3 страницыAtomic absorption spectroscopy analysis of metalsVishnu VichuZОценок пока нет
- Motion 1Документ3 страницыMotion 1Fenil ShahОценок пока нет
- Atlas Copco: Parts ListДокумент152 страницыAtlas Copco: Parts ListChathura SenanayakeОценок пока нет