Вам также может понравиться
- استاندارد 2800 زلزله ویرایش چهارمДокумент237 страницاستاندارد 2800 زلزله ویرایش چهارمciscoОценок пока нет
- Seismic Response of Elevated Liquid Storage Steel Tanks Isolated by VCFPS at Top of Tower Under Near-Fault Ground MotionsДокумент6 страницSeismic Response of Elevated Liquid Storage Steel Tanks Isolated by VCFPS at Top of Tower Under Near-Fault Ground MotionsciscoОценок пока нет
- Hazard and Safety Investigations For LNG Tanks PDFДокумент2 страницыHazard and Safety Investigations For LNG Tanks PDFcisco100% (1)
- Seismic Upgrade: Tanks & Storage FacilitiesДокумент1 страницаSeismic Upgrade: Tanks & Storage FacilitiesciscoОценок пока нет
- Simple Procedure For Seismic Analysis of Liquid Storage TanksДокумент5 страницSimple Procedure For Seismic Analysis of Liquid Storage Tankscisco100% (1)
- NEESE-Defense Base-Isolation Tests Effectiveness of Friction Pendulum and Lead-Rubber Bearings SystemsДокумент10 страницNEESE-Defense Base-Isolation Tests Effectiveness of Friction Pendulum and Lead-Rubber Bearings SystemsciscoОценок пока нет
- Modular LNG Tanks Powell ArupДокумент19 страницModular LNG Tanks Powell ArupciscoОценок пока нет
- Effect of Base Isolation On Seismic Fragility of Aboveground LNG Storage TanksДокумент6 страницEffect of Base Isolation On Seismic Fragility of Aboveground LNG Storage TanksciscoОценок пока нет
- NEESE-Defense Base Isolation Tests Performance of Triple-Pendulum BearingsДокумент10 страницNEESE-Defense Base Isolation Tests Performance of Triple-Pendulum BearingsciscoОценок пока нет
- MAURER Premium Seismic Isolation With Spherical Sliding Isolators For Buildings and Tank StructuresДокумент16 страницMAURER Premium Seismic Isolation With Spherical Sliding Isolators For Buildings and Tank StructuresciscoОценок пока нет
- Base Isolated LNG Tanks Seismic Analyses and Comparison StudiesДокумент10 страницBase Isolated LNG Tanks Seismic Analyses and Comparison StudiesciscoОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Wind Loads On Utility Scale Solar PV Power Plants DBanks 2015Документ8 страницWind Loads On Utility Scale Solar PV Power Plants DBanks 2015Stefan CheungОценок пока нет
- Rep. Prog. Phys., Vol. 41, 1978. Printed in Great BritainДокумент43 страницыRep. Prog. Phys., Vol. 41, 1978. Printed in Great BritainDeepak PatelОценок пока нет
- Physics Manual 2021-22Документ61 страницаPhysics Manual 2021-22Ashesh Krishna Adhikari100% (1)
- Fourier Analysis of Vibrating String PDFДокумент2 страницыFourier Analysis of Vibrating String PDFSachin Pradeep E.TОценок пока нет
- 1 PDFДокумент7 страниц1 PDFxabihdez05Оценок пока нет
- Resonant Excitation of Coherent Cerenkov Radiation in Dielectric Lined WaveguidesДокумент3 страницыResonant Excitation of Coherent Cerenkov Radiation in Dielectric Lined WaveguidesParticle Beam Physics LabОценок пока нет
- 69mead MarcusДокумент13 страниц69mead MarcusPhamОценок пока нет
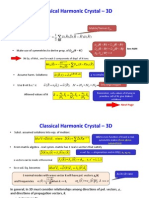
- Classical Harmonic Crystal - 3DДокумент3 страницыClassical Harmonic Crystal - 3DtxtanveerОценок пока нет
- Oth 379Документ62 страницыOth 379sachin_badkeОценок пока нет
- Eigen 14Документ4 страницыEigen 14Essenam GOLIОценок пока нет
- UiiuДокумент20 страницUiiupravi2010Оценок пока нет
- Hydroelastic Analysis of Pontoon-Type VLFS: A Literature SurveyДокумент12 страницHydroelastic Analysis of Pontoon-Type VLFS: A Literature SurveyFarah Mehnaz HossainОценок пока нет
- Crystal VibrationДокумент22 страницыCrystal VibrationParkfest AradacОценок пока нет
- MEC413 Exam 2009 Final NSДокумент7 страницMEC413 Exam 2009 Final NSJulian ChanОценок пока нет
- Finite Element Structural Analysis Movable Crusher Supports: Dan Neff and Conrad Huss, USAДокумент6 страницFinite Element Structural Analysis Movable Crusher Supports: Dan Neff and Conrad Huss, USAJakesОценок пока нет
- C10 - Mechanical and Sound WavesДокумент27 страницC10 - Mechanical and Sound WavesAzmira AhmadОценок пока нет
- Surface Effects in Solid Mechanics PDFДокумент199 страницSurface Effects in Solid Mechanics PDFSantiago Peña ClavijoОценок пока нет
- Bicycle Car Model VibratingДокумент6 страницBicycle Car Model VibratingRonyCastañeda100% (2)
- Compliant Structures For Offshore Wind TurbinesДокумент33 страницыCompliant Structures For Offshore Wind Turbineskostas.michaОценок пока нет
- Optimization of Geometric Features of Circular Saw Blades and Parameters of The Manufacturing Process Aided by OptislangДокумент21 страницаOptimization of Geometric Features of Circular Saw Blades and Parameters of The Manufacturing Process Aided by Optislangk cОценок пока нет
- Book Reviews: Journal of Applied Mechanics JUNE 1980, VOL. 47 / 461Документ2 страницыBook Reviews: Journal of Applied Mechanics JUNE 1980, VOL. 47 / 461Uxue GonzálezОценок пока нет
- The Unique High-Rise Structure of The MNC Tower 2 Building in JakartaДокумент8 страницThe Unique High-Rise Structure of The MNC Tower 2 Building in JakartaNityananda Permadi TjokrodimurtiОценок пока нет
- MEEM 3700 Mechanical VibrationsДокумент6 страницMEEM 3700 Mechanical VibrationsJohn Larry CorpuzОценок пока нет
- Violin Modes ConstructionДокумент7 страницViolin Modes ConstructionBrandon McguireОценок пока нет
- Using AVR CounterДокумент21 страницаUsing AVR CounterRam Krishan Sharma0% (1)
- Some Non-Perturbative Semi-Classical Methods in Quantum Field TheoryДокумент87 страницSome Non-Perturbative Semi-Classical Methods in Quantum Field TheoryRui PuОценок пока нет
- European Design Guide For Footbridge Vibration: Christoph HEINEMEYER Markus FELDMANNДокумент14 страницEuropean Design Guide For Footbridge Vibration: Christoph HEINEMEYER Markus FELDMANNAbdullah NajjarОценок пока нет
- WilberforceДокумент16 страницWilberforce123chess0% (1)
- Waves: PhysicsДокумент53 страницыWaves: Physicsjannie nОценок пока нет
- Chapter 01 - SolidWorks SimulationДокумент15 страницChapter 01 - SolidWorks SimulationAhmed DjebbiОценок пока нет