Вам также может понравиться
- Dual Axis Solar Tracker Using ArduinoДокумент16 страницDual Axis Solar Tracker Using Arduinokanchan boneОценок пока нет
- Solar Tracker With Stepper Motor Control Using MicrocontrollerДокумент2 страницыSolar Tracker With Stepper Motor Control Using Microcontrollerieee4mybusinessonly100% (1)
- Model of Anti Roll Back System On Hilling Situation in Car-29317Документ4 страницыModel of Anti Roll Back System On Hilling Situation in Car-29317kanchan boneОценок пока нет
- Hill Station Breaking SystemДокумент48 страницHill Station Breaking Systemkanchan bone80% (5)
- 1210 5973Документ17 страниц1210 5973giridharsinghОценок пока нет
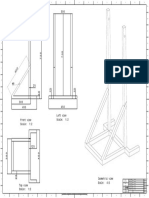
- FrameДокумент1 страницаFramesuraj dhulannavarОценок пока нет
- Ratchets 0101Документ1 страницаRatchets 0101kanchan boneОценок пока нет
- Patil 2016Документ5 страницPatil 2016kanchan boneОценок пока нет
- 1:1 XXX A4: Toshavi 4/8/2016Документ1 страница1:1 XXX A4: Toshavi 4/8/2016suraj dhulannavarОценок пока нет
- 1210 5973Документ17 страниц1210 5973giridharsinghОценок пока нет
- CALCULATION OF FOUR WAY POWER HACK SAW DESIGNДокумент4 страницыCALCULATION OF FOUR WAY POWER HACK SAW DESIGNkanchan bone80% (5)
- YyyyyyyyyyyyyyyyyyyyyyyyyДокумент6 страницYyyyyyyyyyyyyyyyyyyyyyyyykanchan boneОценок пока нет
- Head Li8 + Hand Brake With CalculationsДокумент32 страницыHead Li8 + Hand Brake With Calculationskanchan boneОценок пока нет
- 978 1 58503 581 6 6Документ21 страница978 1 58503 581 6 6Saravanan Srvn TОценок пока нет
- Design of An Adaptive Headlights System For AutomobilesДокумент6 страницDesign of An Adaptive Headlights System For Automobileskanchan boneОценок пока нет
- Fabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)Документ5 страницFabrication of Electro Hydraulic Jack: International Research Journal of Engineering and Technology (IRJET)kanchan boneОценок пока нет
- Mini Report-Reverse Braking SystemДокумент25 страницMini Report-Reverse Braking Systemkanchan boneОценок пока нет
- Detailed Project Report ON: Hybrid Solar Tray Dryer - 96 TraysДокумент47 страницDetailed Project Report ON: Hybrid Solar Tray Dryer - 96 Trayskanchan boneОценок пока нет
- Material Selection Method in Design of Automotive Brake DiscДокумент5 страницMaterial Selection Method in Design of Automotive Brake Discgustavitolp87Оценок пока нет
- Ecsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.Документ3 страницыEcsecuritybased-Safety Auto Brake System For Hill Station Vehicle Using Mems Sensor.kanchan bone100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- For HARDBOUNDДокумент89 страницFor HARDBOUNDdelcar vidal100% (1)
- EN 388 StandardДокумент11 страницEN 388 StandardEngr Saeed Anwar100% (1)
- Scherrer Equation - WikipediaДокумент7 страницScherrer Equation - WikipediaSilviu-Laurentiu BadeaОценок пока нет
- Tradition and Transformation: Democracy and The Politics of Popular Power in Ghana by Maxwell OwusuДокумент38 страницTradition and Transformation: Democracy and The Politics of Popular Power in Ghana by Maxwell OwusuKwame Zulu Shabazz ☥☥☥Оценок пока нет
- A Detailed Lesson Plan in (Teaching Science)Документ8 страницA Detailed Lesson Plan in (Teaching Science)Evan Jane Jumamil67% (3)
- Miriael SabathielДокумент1 страницаMiriael SabathielPweggleОценок пока нет
- Pew Research Center Surveys MethodologyДокумент8 страницPew Research Center Surveys MethodologyJerad BixlerОценок пока нет
- Rekha RaniДокумент2 страницыRekha RaniSANDEEP SinghОценок пока нет
- Employee Wellbeing ProgramДокумент5 страницEmployee Wellbeing ProgramManish SharmaОценок пока нет
- Apsa StyleДокумент4 страницыApsa StyleLincoln DerОценок пока нет
- College New Prospectus PDFДокумент32 страницыCollege New Prospectus PDFJawad ArifОценок пока нет
- Animate Ggplots With Gganimate::: Cheat SheetДокумент2 страницыAnimate Ggplots With Gganimate::: Cheat SheetJosé AnguloОценок пока нет
- SGC Roles and FunctionsДокумент25 страницSGC Roles and FunctionsDivine Grace SamortinОценок пока нет
- Sophia A. McClennen, Remy M. Maisel (Auth.) - Is Satire Saving Our Nation - Mockery and American Politics-Palgrave Macmillan US (2014)Документ254 страницыSophia A. McClennen, Remy M. Maisel (Auth.) - Is Satire Saving Our Nation - Mockery and American Politics-Palgrave Macmillan US (2014)Nicoleta Aldea100% (1)
- The Real Case For Aushwitz - Carlo Mattogno PDFДокумент692 страницыThe Real Case For Aushwitz - Carlo Mattogno PDFJordan100% (3)
- 1 PBДокумент11 страниц1 PBIyus MaisterОценок пока нет
- Class 1 - Cyber Crime, Forensics and ReadinessДокумент7 страницClass 1 - Cyber Crime, Forensics and Readinessmelissa_sylvester7083Оценок пока нет
- NCBSSH e FormДокумент59 страницNCBSSH e FormDaryll Anne LagtaponОценок пока нет
- Vdocument - in - RM PPT On A Study of Work Life Balance of Generation y at Thyssenkrupp PuneДокумент35 страницVdocument - in - RM PPT On A Study of Work Life Balance of Generation y at Thyssenkrupp Puneut123Оценок пока нет
- Principles of Management All ChaptersДокумент263 страницыPrinciples of Management All ChaptersRushabh Vora81% (21)
- Electromagnetism WorksheetДокумент3 страницыElectromagnetism WorksheetGuan Jie KhooОценок пока нет
- Earth - A Spiritual Trap & Practical Exercises To Ascend - GLP EDITIONДокумент111 страницEarth - A Spiritual Trap & Practical Exercises To Ascend - GLP EDITIONMaggador Edward Alexander100% (3)
- The Reception Office: Monday September 28, 2020Документ2 страницыThe Reception Office: Monday September 28, 2020Chikanma OkoisorОценок пока нет
- Unit 03 Techniques of Planning, Controlling and Automating Software ProcessДокумент36 страницUnit 03 Techniques of Planning, Controlling and Automating Software ProcessSajjan PaudelОценок пока нет
- SAP Sample Questions ReviewДокумент18 страницSAP Sample Questions ReviewYasir Yamin SadiОценок пока нет
- Sappress Interface ProgrammingДокумент0 страницSappress Interface ProgrammingEfrain OyarceОценок пока нет
- RS: Railway reservation systemДокумент6 страницRS: Railway reservation systemSaravana KumarОценок пока нет
- Inami, Problem Other MindsДокумент19 страницInami, Problem Other MindsfortyrrОценок пока нет
- C What HappensДокумент192 страницыC What Happenschopsticks_phc100% (2)
- UT71 Computer Interface SoftwareДокумент3 страницыUT71 Computer Interface SoftwareOrlando FernandezОценок пока нет