Вам также может понравиться
- DIY Mobile Solar Power 2020Документ113 страницDIY Mobile Solar Power 2020Silviu SerbanaОценок пока нет
- 6G72 de Dos de Dos PDFДокумент140 страниц6G72 de Dos de Dos PDFgljr32941181011100% (2)
- Short Circuit CalculationsДокумент56 страницShort Circuit CalculationsDaryAnto100% (1)
- Transformer - NT PDFДокумент108 страницTransformer - NT PDFReshab Sahoo100% (1)
- Experiment 8 Synchronous Generator Line SynchronizationДокумент10 страницExperiment 8 Synchronous Generator Line SynchronizationMd Rodi Bidin100% (1)
- Air Conditioning DefinitionsДокумент29 страницAir Conditioning DefinitionsRay RavelОценок пока нет
- CHAPTER 2 TransformersДокумент70 страницCHAPTER 2 TransformersTom100% (1)
- UPRM Electric Machines Laboratory Manual PDFДокумент269 страницUPRM Electric Machines Laboratory Manual PDFgnathblОценок пока нет
- Electrical Machine Lab ManualДокумент61 страницаElectrical Machine Lab ManualPrem SharmaОценок пока нет
- Semiconductor PhysicsДокумент42 страницыSemiconductor PhysicsDebajyoti DattaОценок пока нет
- Simulation of A Synchronous Boost ConverterДокумент7 страницSimulation of A Synchronous Boost ConverterThinh NguyenОценок пока нет
- RSV PDFДокумент2 страницыRSV PDFhoseinОценок пока нет
- 2005 C4xsaraxsara Picasso BerlingoДокумент462 страницы2005 C4xsaraxsara Picasso BerlingoEdson LeandroОценок пока нет
- How An Smps Works: Rectifier StageДокумент7 страницHow An Smps Works: Rectifier StageImran AshrafОценок пока нет
- Fans and BlowersДокумент19 страницFans and BlowersBabylyn AustriaОценок пока нет
- Exam 2 SolДокумент6 страницExam 2 Soldummy1957jОценок пока нет
- PV ExercisesДокумент108 страницPV ExercisesKhishgee_Tamir67% (3)
- Office BuildingДокумент14 страницOffice BuildingLouise Lane100% (1)
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОт EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsОценок пока нет
- Auto TransformerДокумент20 страницAuto TransformerDawa PenjorОценок пока нет
- Open Circuit and Short Circuit On Single Phase TransformerДокумент9 страницOpen Circuit and Short Circuit On Single Phase TransformerManju KommojuОценок пока нет
- LCC HVDCДокумент7 страницLCC HVDCSubbu ChОценок пока нет
- Alternating Current Circuit Fundamentals - A Practical Approach PDFДокумент47 страницAlternating Current Circuit Fundamentals - A Practical Approach PDFsofyan_shahОценок пока нет
- On IgbtДокумент19 страницOn IgbtSayanta Saha100% (1)
- Boost DesignДокумент4 страницыBoost DesignmuthukumartharaniОценок пока нет
- What Is An "M7" Diode?: Sherrellbc Jan 16 '15 at 15:45Документ2 страницыWhat Is An "M7" Diode?: Sherrellbc Jan 16 '15 at 15:45Jai Ho100% (1)
- Tube Light ManualДокумент2 страницыTube Light ManualSwaroop MallickОценок пока нет
- Exp 11 Single Phase Inverter Part IДокумент7 страницExp 11 Single Phase Inverter Part Iusmpowerlab0% (1)
- Differentiator ExperimentДокумент25 страницDifferentiator ExperimentAlyaa Nadzirah Binti Shbini100% (1)
- EEE 3571 Assignment 3 and 4Документ3 страницыEEE 3571 Assignment 3 and 4Emmanuel Nama HasalamaОценок пока нет
- Phase Failure RelaysДокумент8 страницPhase Failure Relaysdeepthik27Оценок пока нет
- Voltage Source InverterДокумент77 страницVoltage Source InverterSaied Aly SalamahОценок пока нет
- Basic Electrical Engineering (BEEE101L) : Presented byДокумент23 страницыBasic Electrical Engineering (BEEE101L) : Presented byAsh wanth100% (1)
- Seminar On: (Programmable Logic Controller)Документ21 страницаSeminar On: (Programmable Logic Controller)balajigururajОценок пока нет
- Analog Circuits SyllabusДокумент5 страницAnalog Circuits SyllabusVilayil jestinОценок пока нет
- Full Wave Controlled Centre Tap RectifierДокумент11 страницFull Wave Controlled Centre Tap RectifierUmashankar SubramaniamОценок пока нет
- What Is The Use of Voltage Stabilizer?Документ9 страницWhat Is The Use of Voltage Stabilizer?Naimish SukhadeveОценок пока нет
- Lab 5 Transistor Characteristic 1Документ14 страницLab 5 Transistor Characteristic 1Ratnadewi SerbiniОценок пока нет
- EE309 Notes 07 PDFДокумент4 страницыEE309 Notes 07 PDFbals123456100% (1)
- DP15&DP16 Error CodesДокумент1 страницаDP15&DP16 Error Codespavlik1Оценок пока нет
- PUT Experiment EditedДокумент9 страницPUT Experiment EditedReineirDuranОценок пока нет
- Chap4-Buck Boost and FlybackДокумент29 страницChap4-Buck Boost and FlybackArchit BaglaОценок пока нет
- TTL LOGIC Family - Hariram-1Документ16 страницTTL LOGIC Family - Hariram-1Hari RamОценок пока нет
- Machine LabДокумент7 страницMachine LabNurjahan-Ara StudentОценок пока нет
- Wireless Stepper Motor ControlДокумент2 страницыWireless Stepper Motor ControlHarsha100% (1)
- Phasor Representation of ACДокумент21 страницаPhasor Representation of ACKavitha NaikОценок пока нет
- Transformer Less POWER SUPPLY REPORTДокумент7 страницTransformer Less POWER SUPPLY REPORTضياء بن احمد الكباري67% (3)
- Two Point StarterДокумент4 страницыTwo Point StarterudhayabarathiОценок пока нет
- Electronic Devices Used in Power Electronics Characteristics ComparisonДокумент12 страницElectronic Devices Used in Power Electronics Characteristics ComparisonEysha qureshiОценок пока нет
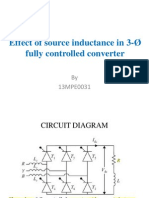
- Effect of Source Inductance in 3Ø Full WaveДокумент12 страницEffect of Source Inductance in 3Ø Full WaveUmashankar Subramaniam100% (1)
- 2002 Lecture - 5-7Документ21 страница2002 Lecture - 5-7acc gemОценок пока нет
- Hopkinson Test On DC Shunt MotorДокумент5 страницHopkinson Test On DC Shunt MotorVarun VadluriОценок пока нет
- Lecture 2 (Communication Channel)Документ23 страницыLecture 2 (Communication Channel)baginno20014262Оценок пока нет
- Amplifiers and OscillatorsДокумент10 страницAmplifiers and OscillatorsKapil ChoudharyОценок пока нет
- Simple Light Dimmer CircuitДокумент2 страницыSimple Light Dimmer Circuitmmism88100% (1)
- OpampДокумент31 страницаOpampahimsa_katangi100% (5)
- Frequency Meter Lecture NotesДокумент4 страницыFrequency Meter Lecture NotesSam AndersonОценок пока нет
- A DQ Frame Controller For Single Phase Inverters ETDДокумент135 страницA DQ Frame Controller For Single Phase Inverters ETDkripansh0% (1)
- Unit - 3: Symmetrical Fault AnalysisДокумент36 страницUnit - 3: Symmetrical Fault Analysisdileep kumarОценок пока нет
- Common Base Transistor Characteristics PDFДокумент2 страницыCommon Base Transistor Characteristics PDFTravis50% (2)
- Single-Phase Transformer: 1 Electrical MachinesДокумент28 страницSingle-Phase Transformer: 1 Electrical Machinesaswardi8756100% (1)
- Oscillator PDFДокумент4 страницыOscillator PDFJoshua DuffyОценок пока нет
- Lecture 5 - Climper and Clamper CircuitДокумент22 страницыLecture 5 - Climper and Clamper CircuitArifah HamidunОценок пока нет
- Lab 4 Half Wave and Full WaveДокумент8 страницLab 4 Half Wave and Full WaveRashid Rind Rashid Rind100% (1)
- Clap Switch CircuitДокумент5 страницClap Switch CircuitSabid Uddin100% (2)
- Eee2210 Analogue Elec II Omae Tie-PrintreadyДокумент4 страницыEee2210 Analogue Elec II Omae Tie-PrintreadyMike ShakespeareОценок пока нет
- Exp 8 Buck ConverterДокумент7 страницExp 8 Buck Converterusmpowerlab50% (2)
- BEE LAB MANUAL FINAL1st SemesterДокумент38 страницBEE LAB MANUAL FINAL1st SemesterSaif KhanОценок пока нет
- Ee 328 Lecture 4Документ33 страницыEe 328 Lecture 4Eric KerrОценок пока нет
- Em - Ii PPT - 0Документ138 страницEm - Ii PPT - 0krishnandrkОценок пока нет
- Chapter14 1feb2014 LFДокумент39 страницChapter14 1feb2014 LFgnathblОценок пока нет
- Generator Curves PDFДокумент8 страницGenerator Curves PDFdababa99Оценок пока нет
- AC Machines Lab Manual PDFДокумент91 страницаAC Machines Lab Manual PDFറിജിൽ വി ആർ100% (2)
- Generator Capability CurveДокумент20 страницGenerator Capability CurvegnathblОценок пока нет
- Gopi 1lab ManualДокумент102 страницыGopi 1lab ManualgnathblОценок пока нет
- R & D JoДокумент3 страницыR & D JognathblОценок пока нет
- Experiment No-1: Aim:-Low Resistance Using Kelvin Double BridgeДокумент21 страницаExperiment No-1: Aim:-Low Resistance Using Kelvin Double BridgegnathblОценок пока нет
- ECE Lab Safety ProceduresДокумент4 страницыECE Lab Safety ProceduresDesignОценок пока нет
- Experiment No-1: Aim:-Low Resistance Using Kelvin Double BridgeДокумент21 страницаExperiment No-1: Aim:-Low Resistance Using Kelvin Double BridgegnathblОценок пока нет
- BTL 4th Sem Power Electronics Lab ManualДокумент88 страницBTL 4th Sem Power Electronics Lab ManualgnathblОценок пока нет
- DC Machines Lab ManualДокумент153 страницыDC Machines Lab ManualdaluОценок пока нет
- AC Machines Lab Manual PDFДокумент91 страницаAC Machines Lab Manual PDFറിജിൽ വി ആർ100% (2)
- Em 2labmanualfinal 121001105841 Phpapp02Документ74 страницыEm 2labmanualfinal 121001105841 Phpapp02vainateyagoldarОценок пока нет
- Machines Laboratory NEWДокумент52 страницыMachines Laboratory NEWgnathblОценок пока нет
- Ge2321 Communication-Lab-Record PDFДокумент88 страницGe2321 Communication-Lab-Record PDFBittu GoswamiОценок пока нет
- (電動機械l7d補充教材) Uptu - electromechanical Energy ConversionДокумент66 страниц(電動機械l7d補充教材) Uptu - electromechanical Energy ConversionSuhaila EhabОценок пока нет
- Emec IIISem ECE PDFДокумент47 страницEmec IIISem ECE PDFgnathblОценок пока нет
- Cse Vi Operations Research (10cs661) AssignmentДокумент6 страницCse Vi Operations Research (10cs661) AssignmentgnathblОценок пока нет
- EE 2208 Lab ManualДокумент50 страницEE 2208 Lab ManualHemanth Kumar RajendakumarОценок пока нет
- BID SOE Electrical Machine LabДокумент35 страницBID SOE Electrical Machine LabgnathblОценок пока нет
- Machines Laboratory NEWДокумент52 страницыMachines Laboratory NEWgnathblОценок пока нет
- Lic ManualДокумент80 страницLic ManualSureshKumarОценок пока нет
- AC Machines Lab Manual PDFДокумент91 страницаAC Machines Lab Manual PDFറിജിൽ വി ആർ100% (2)
- Growatt ES5000Документ2 страницыGrowatt ES5000Fudin BiliОценок пока нет
- KITI GesProspekt HT EV Engl INTДокумент44 страницыKITI GesProspekt HT EV Engl INTAlex StanciuОценок пока нет
- Evaluation of Heat Gains in UK Office Environments: B.SC., PH.DДокумент11 страницEvaluation of Heat Gains in UK Office Environments: B.SC., PH.DpauloОценок пока нет
- Examview - 6th Grade Science Benchmark Yearly 14-15 Wo - AnsДокумент7 страницExamview - 6th Grade Science Benchmark Yearly 14-15 Wo - Ansapi-232424041Оценок пока нет
- Energy Conversion and Management: Carolina Marugán-Cruz, D. Serrano, J. Gómez-Hernández, S. Sánchez-Delgado TДокумент10 страницEnergy Conversion and Management: Carolina Marugán-Cruz, D. Serrano, J. Gómez-Hernández, S. Sánchez-Delgado TNatsolar IngenieriaОценок пока нет
- Geochemical Exploration ServicesДокумент2 страницыGeochemical Exploration ServicesFahirОценок пока нет
- Testing and Performance Assessment of 1Kwp Solar Rooftop SystemДокумент5 страницTesting and Performance Assessment of 1Kwp Solar Rooftop Systemlaw100% (1)
- EE462 Second PartДокумент27 страницEE462 Second PartMusabОценок пока нет
- 12V To 120V Inverter: Home Circuits Power SupplyДокумент4 страницы12V To 120V Inverter: Home Circuits Power SupplyKrishna ChaitanyaОценок пока нет
- Natural Gas SpecificationsДокумент2 страницыNatural Gas Specificationsneongen989Оценок пока нет
- Guidelines For Installation of SWHS in High Rise Buildings PDFДокумент4 страницыGuidelines For Installation of SWHS in High Rise Buildings PDFBonaventure NzeyimanaОценок пока нет
- 3G3MX2 A4022 OmronДокумент13 страниц3G3MX2 A4022 Omronsareluis2727Оценок пока нет
- New Net Zero Sample PagesДокумент6 страницNew Net Zero Sample PagesChelsea Green PublishingОценок пока нет
- Samantha Park's Portfolio 2013Документ18 страницSamantha Park's Portfolio 2013Samantha Semee ParkОценок пока нет
- ME 8792 PPE Unit - 2Документ71 страницаME 8792 PPE Unit - 2UdamanОценок пока нет
- Resume - Sanket D MankarДокумент2 страницыResume - Sanket D MankariyergvОценок пока нет
- EP Engineering - Top 5 MEP Mistakes To AvoidДокумент2 страницыEP Engineering - Top 5 MEP Mistakes To Avoidervikas34Оценок пока нет
- Dynamics of Machinery Question Bank PDFДокумент10 страницDynamics of Machinery Question Bank PDFSree MurthyОценок пока нет
- Natural Resources and Their ManagementДокумент24 страницыNatural Resources and Their Managementshilpaverma2106Оценок пока нет