Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Basic Electronics For Non Electrical Engineers PDFДокумент1 страницаBasic Electronics For Non Electrical Engineers PDFsasa0% (2)
- Basic Electronics For Non Electrical Engineers PDFДокумент1 страницаBasic Electronics For Non Electrical Engineers PDFsasa0% (2)
- D8T HidraulicoДокумент13 страницD8T Hidraulicoesmeralda100% (1)
- Power AllocationДокумент2 страницыPower AllocationsasaОценок пока нет
- Original Contribution: Correlation of Cavitation With Ultrasound Enhancement of ThrombolysisДокумент11 страницOriginal Contribution: Correlation of Cavitation With Ultrasound Enhancement of ThrombolysissasaОценок пока нет
- Chapter 20 - The Skin EffectДокумент11 страницChapter 20 - The Skin EffectAndrei SzilagyiОценок пока нет
- Hydroacoustic Fixture ManualДокумент27 страницHydroacoustic Fixture ManualsasaОценок пока нет
- Infineon Idh20g65c6 Ds v02 00 enДокумент10 страницInfineon Idh20g65c6 Ds v02 00 ensasaОценок пока нет
- Infineon Idh20g65c6 Ds v02 00 enДокумент10 страницInfineon Idh20g65c6 Ds v02 00 ensasaОценок пока нет
- Heat Transfer Fluent TrainingДокумент37 страницHeat Transfer Fluent TrainingbastinaduОценок пока нет
- Fuster2011p13052J Acoust Soc AmДокумент10 страницFuster2011p13052J Acoust Soc AmsasaОценок пока нет
- Infineon Idh20g65c6 Ds v02 00 enДокумент10 страницInfineon Idh20g65c6 Ds v02 00 ensasaОценок пока нет
- Trial MovementДокумент1 страницаTrial MovementsasaОценок пока нет
- We Power Falcon 12Документ1 страницаWe Power Falcon 12sasaОценок пока нет
- Wind Turbine Blade AerodynamicsДокумент10 страницWind Turbine Blade AerodynamicsMahesh MunjalОценок пока нет
- Dynamics and Acoustics of A Spherical Bubble Rising Under Gravity in An Inviscid LiquidДокумент10 страницDynamics and Acoustics of A Spherical Bubble Rising Under Gravity in An Inviscid LiquidsasaОценок пока нет
- Fastener Fair Stuttgart 2017 Show PreviewДокумент81 страницаFastener Fair Stuttgart 2017 Show PreviewAmit PrajapatiОценок пока нет
- Vdocuments - MX Emr3 System Description 091107 1Документ96 страницVdocuments - MX Emr3 System Description 091107 1yudiОценок пока нет
- Compresor Atlas Copco GA30Документ16 страницCompresor Atlas Copco GA30Florin Maria Chirila100% (1)
- Electrical Equipment Layout GuideДокумент25 страницElectrical Equipment Layout GuideAgus Dani100% (1)
- MOM I - Module 37Документ6 страницMOM I - Module 37Muhammad HabibОценок пока нет
- EmДокумент6 страницEmGonzalo Antonio Mamani PayeОценок пока нет
- Figure R4-1: Vacuum Column FlowsheetДокумент18 страницFigure R4-1: Vacuum Column Flowsheetnico123456789Оценок пока нет
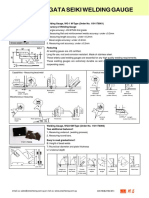
- Niigata Welding GaugeДокумент2 страницыNiigata Welding GaugeFriady HalimОценок пока нет
- How Carburetors Work: Understanding the Six Main SystemsДокумент7 страницHow Carburetors Work: Understanding the Six Main Systemssaithea25Оценок пока нет
- Chapter 1 HeatДокумент10 страницChapter 1 HeatJikni NobleОценок пока нет
- Curvilinear Motion and ProjectilesДокумент15 страницCurvilinear Motion and ProjectilesAltammar1367% (3)
- Spigot Product Spec Sheet 1614023137Документ1 страницаSpigot Product Spec Sheet 1614023137Cojuhari SergiuОценок пока нет
- Rail Transportation Safety Investigation Report R21C0070Документ7 страницRail Transportation Safety Investigation Report R21C0070CTV CalgaryОценок пока нет
- tn-16 Rate Process Method Projecting Pe PipeДокумент8 страницtn-16 Rate Process Method Projecting Pe Pipeyrdna nawaiteos100% (1)
- Memoria Muro Mamposteria Escalera QuickMasonryДокумент7 страницMemoria Muro Mamposteria Escalera QuickMasonryJulio Marcial Ramos QuinteroОценок пока нет
- Turning Moment Diagram1Документ25 страницTurning Moment Diagram1Bibin BabyОценок пока нет
- 2006 VA Powertrain SprinterДокумент292 страницы2006 VA Powertrain Sprinteractuator79100% (2)
- Test 1 BFC 43103 Semi I 20202021Документ7 страницTest 1 BFC 43103 Semi I 20202021Mohamad Ridhwan Bin ZahriОценок пока нет
- Mr-75-163-Tds Critical SparesДокумент3 страницыMr-75-163-Tds Critical Sparescmrig74Оценок пока нет
- NQR 87-80-190 CREW - ARK0953 - v03Документ4 страницыNQR 87-80-190 CREW - ARK0953 - v03LEON AGUILAR PEDRO RONALDОценок пока нет
- Elektrisk (Katalog - Ermax)Документ267 страницElektrisk (Katalog - Ermax)ionel1987Оценок пока нет
- Flowfit CPA250: Technical InformationДокумент8 страницFlowfit CPA250: Technical Informationknightfelix12Оценок пока нет
- Project Cover Sheet and Drawing List for MAN Engine CraneДокумент16 страницProject Cover Sheet and Drawing List for MAN Engine CraneYuseriОценок пока нет
- Cressi-Sub Regulator User Manual: 1st Stage ComponentsДокумент39 страницCressi-Sub Regulator User Manual: 1st Stage ComponentsSergio GlezОценок пока нет
- Abdalla2003-Design Against Cracking at Openings in Reinforced Concrete Beams Strengthened With Composite SheetsДокумент8 страницAbdalla2003-Design Against Cracking at Openings in Reinforced Concrete Beams Strengthened With Composite Sheets010Оценок пока нет
- Your First Day Lifeguarding: How To Vacuum and Backwash A PoolДокумент4 страницыYour First Day Lifeguarding: How To Vacuum and Backwash A PoolMattMonroeОценок пока нет
- Manual Motor Crrcpro26iДокумент8 страницManual Motor Crrcpro26ieduardo_albornoz_5Оценок пока нет
- Midsized With Big Features.: Horizontal Directional Drilling SystemДокумент2 страницыMidsized With Big Features.: Horizontal Directional Drilling SystemJose RodriguezОценок пока нет
- Ep11450 E12 PDFДокумент9 страницEp11450 E12 PDFWan WeiОценок пока нет