Вам также может понравиться
- Introducción PermeacionДокумент11 страницIntroducción PermeacionMeLissa Betsabe GarzónОценок пока нет
- Trabajo Practico de Laboratorio #1Документ3 страницыTrabajo Practico de Laboratorio #1MeLissa Betsabe GarzónОценок пока нет
- Osmosis y difusión a través de membranasДокумент4 страницыOsmosis y difusión a través de membranasMeLissa Betsabe GarzónОценок пока нет
- Laborat 4Документ3 страницыLaborat 4MeLissa Betsabe GarzónОценок пока нет
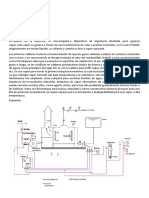
- RotavaporДокумент3 страницыRotavaporMeLissa Betsabe Garzón100% (1)
- DFDFDFDFDFДокумент3 страницыDFDFDFDFDFMeLissa Betsabe GarzónОценок пока нет
- Informe de Laboratorio #4Документ4 страницыInforme de Laboratorio #4MeLissa Betsabe GarzónОценок пока нет
- DESTILACIÓNДокумент4 страницыDESTILACIÓNMeLissa Betsabe GarzónОценок пока нет
- GHGHGHGHGHGHGHДокумент2 страницыGHGHGHGHGHGHGHMeLissa Betsabe GarzónОценок пока нет
- Industrias Del MedioДокумент6 страницIndustrias Del MedioMeLissa Betsabe GarzónОценок пока нет
- Laboratorio 1 1 Parte Quimica OrganicaДокумент3 страницыLaboratorio 1 1 Parte Quimica OrganicaMeLissa Betsabe GarzónОценок пока нет
- PPPPPPPPPPPPPPPДокумент3 страницыPPPPPPPPPPPPPPPMeLissa Betsabe GarzónОценок пока нет
- SdasdasdasdДокумент2 страницыSdasdasdasdMeLissa Betsabe GarzónОценок пока нет
- Intercambiador de CalorДокумент1 страницаIntercambiador de CalorMeLissa Betsabe GarzónОценок пока нет
- EvaporadoresДокумент1 страницаEvaporadoresMeLissa Betsabe GarzónОценок пока нет
- Trabajo Practico N 7Документ2 страницыTrabajo Practico N 7MeLissa Betsabe GarzónОценок пока нет
- Organ I GramaДокумент1 страницаOrgan I GramaMeLissa Betsabe GarzónОценок пока нет
- Osmosis y difusión a través de membranasДокумент4 страницыOsmosis y difusión a través de membranasMeLissa Betsabe GarzónОценок пока нет
- Laboratorio 3Документ11 страницLaboratorio 3MeLissa Betsabe GarzónОценок пока нет
- Laboratorio N - 1-EspectrometriaДокумент2 страницыLaboratorio N - 1-EspectrometriaMeLissa Betsabe GarzónОценок пока нет
- Laboratorio N - 2-Reacciones IonicasДокумент1 страницаLaboratorio N - 2-Reacciones IonicasMeLissa Betsabe GarzónОценок пока нет
- Laboratorio N°9Документ6 страницLaboratorio N°9MeLissa Betsabe GarzónОценок пока нет
- Laboratorio Nº8Документ5 страницLaboratorio Nº8MeLissa Betsabe GarzónОценок пока нет
- Actividad Experimental #6Документ5 страницActividad Experimental #6MeLissa Betsabe GarzónОценок пока нет
- Laboratorio 1Документ11 страницLaboratorio 1MeLissa Betsabe GarzónОценок пока нет
- Laboratorio N°10Документ4 страницыLaboratorio N°10MeLissa Betsabe GarzónОценок пока нет
- Laboratorio Nº8Документ5 страницLaboratorio Nº8MeLissa Betsabe GarzónОценок пока нет
- Trabajo de Laboratorio Sistemas HeterogeneosДокумент6 страницTrabajo de Laboratorio Sistemas HeterogeneosMeLissa Betsabe GarzónОценок пока нет
- LABORATORIO Nº6subirДокумент4 страницыLABORATORIO Nº6subirMeLissa Betsabe GarzónОценок пока нет
- SD 11 Ecuaciones Diferenciales GOMEZДокумент80 страницSD 11 Ecuaciones Diferenciales GOMEZAntonio José Perche GilОценок пока нет
- Efectos de Diseño de Reactores en La Torrefacción de BiomasasДокумент5 страницEfectos de Diseño de Reactores en La Torrefacción de BiomasasFredy Laqui CalizayaОценок пока нет
- Ondas ProblemasДокумент175 страницOndas ProblemasAndres MorenoОценок пока нет
- Física Sin MatemáticasДокумент105 страницFísica Sin MatemáticasFran Fdez MtnezОценок пока нет
- Deber de Fisica 3Документ3 страницыDeber de Fisica 3Jaime PérezОценок пока нет
- Fisica de La CatapultaДокумент12 страницFisica de La CatapultaStargateAОценок пока нет
- P27 Problemas de DinamicaДокумент4 страницыP27 Problemas de DinamicaAilin Monserrat DelgadoОценок пока нет
- IMFORME DE 2da LEY DE NEWTONДокумент17 страницIMFORME DE 2da LEY DE NEWTONLuis Angel ChuraОценок пока нет
- Tarea FisicaДокумент4 страницыTarea FisicaEileen Enid Owens0% (3)
- DINAMICAДокумент6 страницDINAMICAmarcela rodriguezОценок пока нет
- A5 EDySДокумент5 страницA5 EDySLeonardo CruzОценок пока нет
- Cálculo Del Valor Teórico Del Momento de Inercia de La Barra Con Agujero Respecto Al Centro de GravedadДокумент2 страницыCálculo Del Valor Teórico Del Momento de Inercia de La Barra Con Agujero Respecto Al Centro de GravedadRoy Tarazona VegaОценок пока нет
- 07 Virtual Reporte Fuerza CentripetaДокумент3 страницы07 Virtual Reporte Fuerza CentripetaMelissa VillanuevaОценок пока нет
- Prueba CB-401 (FS) V2Документ12 страницPrueba CB-401 (FS) V2AnapaulaОценок пока нет
- Trabajo de ElectromagnetismoДокумент4 страницыTrabajo de ElectromagnetismoSaray NiñoОценок пока нет
- Msi Belt Scale PDFДокумент24 страницыMsi Belt Scale PDFAnonymous 4voU8tОценок пока нет
- Fuerza, Campo y Potencial ElectricoДокумент52 страницыFuerza, Campo y Potencial ElectricoMarco Uscamayta100% (2)
- Tema #Potencial y Trabajo EléctricoДокумент4 страницыTema #Potencial y Trabajo EléctricoNataniel PaniaguaОценок пока нет
- Metodo de Euler y Taylor para EdoДокумент76 страницMetodo de Euler y Taylor para Edobleizher100% (1)
- Laboratorio Calificado 3Документ5 страницLaboratorio Calificado 3Jayseidi VGОценок пока нет
- Uploads/book/raw/1472358011899-6fc706f4kox6si2c-/diseño en Hormigon Armado Marcelo Romo ProañolДокумент8 страницUploads/book/raw/1472358011899-6fc706f4kox6si2c-/diseño en Hormigon Armado Marcelo Romo ProañolLuis Orlando Corredor OspinaОценок пока нет
- Bloques 1,2 y 3 - FísicaДокумент5 страницBloques 1,2 y 3 - FísicaIngrid AcatlОценок пока нет
- Proyecto DinamicaДокумент22 страницыProyecto DinamicaEleonaiОценок пока нет
- Bitacora de Actividad FisicaДокумент28 страницBitacora de Actividad Fisicaalex b.xОценок пока нет
- TEMA IV. Sistemas de PartículasДокумент2 страницыTEMA IV. Sistemas de PartículasJuan Campos100% (1)
- EjerciciosДокумент6 страницEjerciciosAlexander BordaОценок пока нет
- Bamv2003 2 PDFДокумент179 страницBamv2003 2 PDFVon PereiraОценок пока нет
- Electricidad Estática y MagnetismoДокумент95 страницElectricidad Estática y MagnetismoRuben Dario Ortiz FОценок пока нет
- Solucionario de Examenes de Fisica Ingenieria UMSAДокумент10 страницSolucionario de Examenes de Fisica Ingenieria UMSAGio Tonny Yanahuaya67% (3)
- Práctica de Fuerza Eléctrica y Campos EléctricosДокумент4 страницыPráctica de Fuerza Eléctrica y Campos EléctricosDayana Delgado BustamanteОценок пока нет