Вам также может понравиться
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Em Lab-II ManualДокумент45 страницEm Lab-II Manualrkadiraj701150% (4)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Рейтинг: 2.5 из 5 звезд2.5/5 (3)
- Exp MachinesДокумент8 страницExp MachinesAngelina JolieОценок пока нет
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesОт EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesОценок пока нет
- Prosedur Percobaan Motor SinkronSinkron Generator SinkronДокумент10 страницProsedur Percobaan Motor SinkronSinkron Generator SinkronDara AmeliaОценок пока нет
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryДокумент6 страницExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalОценок пока нет
- M.A.M School of Engineering TRICHY - 621 105Документ97 страницM.A.M School of Engineering TRICHY - 621 105Preethi RanganathanОценок пока нет
- Induction Motor Lab ManualДокумент11 страницInduction Motor Lab ManualRabah ZaimeddineОценок пока нет
- Lab Manual: Ee 2305 Electrical Machines Lab IiДокумент38 страницLab Manual: Ee 2305 Electrical Machines Lab IiskrtamilОценок пока нет
- EM-I LAB-finalДокумент114 страницEM-I LAB-finalHarimadhavareddy YenireddyОценок пока нет
- 9 Speed Control of DC Shunt MotorДокумент4 страницы9 Speed Control of DC Shunt MotorVaibhavОценок пока нет
- EM-II FinalДокумент57 страницEM-II FinalAtchyut Satya KumarОценок пока нет
- 9 Speed Control of DC Shunt MotorДокумент4 страницы9 Speed Control of DC Shunt MotormanishОценок пока нет
- Brake Test DC Series MotorДокумент3 страницыBrake Test DC Series MotorVARAPRASADОценок пока нет
- Expt No: Date: Load Test On 1Φ Induction Motor AIMДокумент9 страницExpt No: Date: Load Test On 1Φ Induction Motor AIMDina GaranОценок пока нет
- Control System Lab ManualДокумент63 страницыControl System Lab ManualkrishnandrkОценок пока нет
- Load Test On 3 Phase Induction MotorДокумент4 страницыLoad Test On 3 Phase Induction MotorAdi AdnanОценок пока нет
- Lab 1 Power Supply and Torque MeterДокумент5 страницLab 1 Power Supply and Torque Metermuhd danialОценок пока нет
- Jobsheet 2 Mesin Sinkron 2019Документ10 страницJobsheet 2 Mesin Sinkron 2019Koko AhmadОценок пока нет
- Speed Torque Characteristics of 3 Phase Induction MotorДокумент4 страницыSpeed Torque Characteristics of 3 Phase Induction MotorAdi AdnanОценок пока нет
- Swinburns'S Test On D.C Shunt MachineДокумент15 страницSwinburns'S Test On D.C Shunt MachineharimadhavareddyОценок пока нет
- Open Circuit Saturation Curve of An Alternator I. ObjectivesДокумент4 страницыOpen Circuit Saturation Curve of An Alternator I. ObjectivesArnel Pamaos Lopiba MontañezОценок пока нет
- 2 Machine LabДокумент4 страницы2 Machine LabManoj GuptaОценок пока нет
- Circuit Diagram: U19Ee306 - Electrical Machines - I LaboratoryДокумент16 страницCircuit Diagram: U19Ee306 - Electrical Machines - I LaboratorySanthoshОценок пока нет
- Ism LabДокумент67 страницIsm LabpadmavathiОценок пока нет
- Electrical Machines II Lab ManualДокумент28 страницElectrical Machines II Lab ManualAnith Krishnan83% (6)
- Machine Based Experiments Lab Report-1 Name: Karthickeien E BY: CH - EN.U4CCE21024 Group: A TopicДокумент14 страницMachine Based Experiments Lab Report-1 Name: Karthickeien E BY: CH - EN.U4CCE21024 Group: A TopicKartheepan KaОценок пока нет
- EM Lab For ECEДокумент24 страницыEM Lab For ECEAnbalagan GuruОценок пока нет
- EML Manual (2019 2023)Документ43 страницыEML Manual (2019 2023)Areeba NasirОценок пока нет
- Aula - Ensaio de Vazioem Gerador Síncrono - 230831 - 175852Документ6 страницAula - Ensaio de Vazioem Gerador Síncrono - 230831 - 175852cristian kelvinОценок пока нет
- Anna University Practical Lab Manuals For Engineering StudentsДокумент13 страницAnna University Practical Lab Manuals For Engineering StudentsTinku RathoreОценок пока нет
- Exp1 EED3012 WRIMMotor Experiments FH2MK3Документ3 страницыExp1 EED3012 WRIMMotor Experiments FH2MK3EnesVSОценок пока нет
- Lab Manual: ACADEMIC YEAR 2015-16Документ48 страницLab Manual: ACADEMIC YEAR 2015-16ramjiОценок пока нет
- Exp. 2 - OCC and Load Test On AlternatorДокумент7 страницExp. 2 - OCC and Load Test On AlternatorKailash Jagarwal100% (1)
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab Manual FINAL PDFДокумент82 страницыBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab Manual FINAL PDFBHUVANA ARUMUGAMОценок пока нет
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualДокумент81 страницаBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonОценок пока нет
- 142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFДокумент15 страниц142 No Load and Block Rotor Test 3 PH Ind Motor Dol PDFGopinath B L NaiduОценок пока нет
- Em-Ii ExperimentДокумент19 страницEm-Ii Experimentprince rajОценок пока нет
- Basic Electrical Laboratory Manual: Department of Electrical EngineeringДокумент42 страницыBasic Electrical Laboratory Manual: Department of Electrical EngineeringSourav SahooОценок пока нет
- Load Test On Single Phase Induction Motor: EEE 308 Practical Experiment No. 2 Matric Number........................Документ3 страницыLoad Test On Single Phase Induction Motor: EEE 308 Practical Experiment No. 2 Matric Number........................Oladeji Ifedayo RОценок пока нет
- Electrical Machines-I Lab Manual R16 Modified PDFДокумент83 страницыElectrical Machines-I Lab Manual R16 Modified PDFsk ibrahimОценок пока нет
- Swinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)Документ24 страницыSwinburne'S Test ON D.C. Shunt Machine. (Predetermination of Efficiency of Given D.C.Shunt Machine Working As Motor and Generator)pragatinareshОценок пока нет
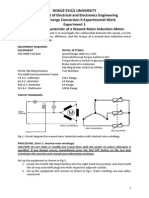
- EEE363 (Exp 9) Study of The Torque Speed Relationship of Wound Rotor Induction Motor With Variable ResistanceДокумент7 страницEEE363 (Exp 9) Study of The Torque Speed Relationship of Wound Rotor Induction Motor With Variable Resistancesalad.ass420420Оценок пока нет
- No Load and Block Rotor Test 3 PH Ind Motor DolДокумент14 страницNo Load and Block Rotor Test 3 PH Ind Motor DolalexОценок пока нет
- Experiment No-01 AIM: To Perform No Load Test On 3ø Induction MotorДокумент17 страницExperiment No-01 AIM: To Perform No Load Test On 3ø Induction Motornainesh goteОценок пока нет
- Sumpner's TestДокумент5 страницSumpner's TestDina GaranОценок пока нет
- Electrical Machines I Lab ManualДокумент54 страницыElectrical Machines I Lab ManualThangam Mahesh89% (18)
- Lab # 7 - DC Machines Part 3 Separately Excited DC GeneratorДокумент6 страницLab # 7 - DC Machines Part 3 Separately Excited DC GeneratorAdeel SyedОценок пока нет
- Lab 3 Squirrel Cage Induction Machine-1Документ8 страницLab 3 Squirrel Cage Induction Machine-1max100% (1)
- BE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualДокумент162 страницыBE8161-Basic Electrical Electronics and Instrumentation Engineering Lab ManualAntonio LeonОценок пока нет
- Exp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andДокумент9 страницExp. 3 - Load Test and Equivalent Circuit Determination On Three Phase Squirrel Cage Induction Motor andSanjay MeenaОценок пока нет
- Experiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheoryДокумент7 страницExperiment 1.: Aim: Determination of Transformer Equivalent Circuit From Open Circuit TheorySur ShriОценок пока нет
- Brake Test DC Shunt MotorДокумент3 страницыBrake Test DC Shunt MotorVARAPRASADОценок пока нет
- EMSL Cycle 2 ExptsДокумент25 страницEMSL Cycle 2 ExptsVarun ChoudharyОценок пока нет
- Binder 1Документ48 страницBinder 1deepanshu rajputОценок пока нет
- Exp 1 N 2Документ16 страницExp 1 N 2mallikarjunbpatilОценок пока нет
- Experiment 6: Alternator Characteristics ObjectДокумент4 страницыExperiment 6: Alternator Characteristics ObjectarjayОценок пока нет
- Buckthorpe Etal 23 Optimising Early Stage ACL Rehab ProcessДокумент24 страницыBuckthorpe Etal 23 Optimising Early Stage ACL Rehab ProcessCole VincentОценок пока нет
- NDT Matrix 12-99-90-1710 - Rev.2 PDFДокумент2 страницыNDT Matrix 12-99-90-1710 - Rev.2 PDFEPC NCCОценок пока нет
- Lecture 8Документ22 страницыLecture 8Ramil Jr. EntanaОценок пока нет
- Health Problems Vocabulary Esl Matching Exercise Worksheet For KidsДокумент2 страницыHealth Problems Vocabulary Esl Matching Exercise Worksheet For KidsTarisubhОценок пока нет
- Inspirational Quotes General and ExamsДокумент6 страницInspirational Quotes General and Examsasha jalanОценок пока нет
- Joseph Conrad - Heart of DarknessДокумент86 страницJoseph Conrad - Heart of DarknessCaztor SscОценок пока нет
- Hazel Rhs Horticulture Level 2 Essay 1Документ24 страницыHazel Rhs Horticulture Level 2 Essay 1hazeldwyerОценок пока нет
- Mid Lesson 1 Ethics & Moral PhiloДокумент13 страницMid Lesson 1 Ethics & Moral PhiloKate EvangelistaОценок пока нет
- Chemical Process DebottleneckingДокумент46 страницChemical Process DebottleneckingAhmed Ansari100% (2)
- MAP V6.3: Reference ManualДокумент106 страницMAP V6.3: Reference ManualGkou DojkuОценок пока нет
- Motorcycle Troubleshooting ManualДокумент15 страницMotorcycle Troubleshooting ManualJan Warmerdam100% (1)
- Equipment in The NICUДокумент7 страницEquipment in The NICUGheDine PeracionОценок пока нет
- Frequency Converter English ManualДокумент33 страницыFrequency Converter English Manualproduccion multipack100% (2)
- Outerstellar Self-Impose RulesДокумент1 страницаOuterstellar Self-Impose RulesIffu The war GodОценок пока нет
- 4 Pure BendingДокумент42 страницы4 Pure BendingOmarfirozОценок пока нет
- The Royal Commonwealth Society of Malaysia: Function MenuДокумент3 страницыThe Royal Commonwealth Society of Malaysia: Function MenuMynak KrishnaОценок пока нет
- LINEAR INDUCTION MOTOR 6981660.ppsxДокумент56 страницLINEAR INDUCTION MOTOR 6981660.ppsxFalley FasterОценок пока нет
- Activity - Alien DNA - CompleteДокумент36 страницActivity - Alien DNA - CompleteJennifer ShawkiОценок пока нет
- Campa Cola - WikipediaДокумент10 страницCampa Cola - WikipediaPradeep KumarОценок пока нет
- 1704 Broschuere Metal-Coating en EinzelseitenДокумент8 страниц1704 Broschuere Metal-Coating en EinzelseiteninterponОценок пока нет
- Lec22 Mod 5-1 Copper New TechniquesДокумент24 страницыLec22 Mod 5-1 Copper New TechniquesAaila AkhterОценок пока нет
- Pediatric Gynecology BaruДокумент79 страницPediatric Gynecology BaruJosephine Irena100% (2)
- Moisture and Total Solids AnalysisДокумент44 страницыMoisture and Total Solids AnalysisNicholas BoampongОценок пока нет
- Vegetable Rates - 02-01-2021Документ454 страницыVegetable Rates - 02-01-2021Saurabh RajputОценок пока нет
- Biasing Opamps Into Class AДокумент11 страницBiasing Opamps Into Class AsddfsdcascОценок пока нет
- Human Eye 5Документ7 страницHuman Eye 5NanditaОценок пока нет
- Penetration Test & Softening PointДокумент7 страницPenetration Test & Softening PointAli M. Chehadeh100% (4)
- South Valley University Faculty of Science Geology Department Dr. Mohamed Youssef AliДокумент29 страницSouth Valley University Faculty of Science Geology Department Dr. Mohamed Youssef AliHari Dante Cry100% (1)
- Industrial Revolution OutlineДокумент8 страницIndustrial Revolution OutlineGeraldine GuarinОценок пока нет
- ReagentsДокумент12 страницReagentsKimscey Yvan DZ SulitОценок пока нет
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4.5 из 5 звезд4.5/5 (543)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionОт EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionРейтинг: 4 из 5 звезд4/5 (331)
- The Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceОт EverandThe Journeyman Electrician Exam Study Guide: Proven Methods for Successfully Passing the Journeyman Electrician Exam with ConfidenceОценок пока нет
- Hacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsОт EverandHacking Electronics: An Illustrated DIY Guide for Makers and HobbyistsРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tОт EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tРейтинг: 4.5 из 5 звезд4.5/5 (27)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeОт EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeРейтинг: 4.5 из 5 звезд4.5/5 (10)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialОт EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialРейтинг: 3.5 из 5 звезд3.5/5 (3)
- Guide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)От EverandGuide to the IET Wiring Regulations: IET Wiring Regulations (BS 7671:2008 incorporating Amendment No 1:2011)Рейтинг: 4 из 5 звезд4/5 (2)
- The Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024От EverandThe Fast Track to Your Extra Class Ham Radio License: Covers All FCC Amateur Extra Class Exam Questions July 1, 2020 Through June 30, 2024Оценок пока нет
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersОт Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersРейтинг: 5 из 5 звезд5/5 (1)
- Power System Control and ProtectionОт EverandPower System Control and ProtectionB. Don RussellРейтинг: 4 из 5 звезд4/5 (11)
- Beginner's Guide to Reading Schematics, Fourth EditionОт EverandBeginner's Guide to Reading Schematics, Fourth EditionРейтинг: 3.5 из 5 звезд3.5/5 (10)
- A Mind at Play: How Claude Shannon Invented the Information AgeОт EverandA Mind at Play: How Claude Shannon Invented the Information AgeРейтинг: 4 из 5 звезд4/5 (53)
- Multiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...От EverandMultiplexed Networks for Embedded Systems: CAN, LIN, FlexRay, Safe-by-Wire...Оценок пока нет
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonОт EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonРейтинг: 5 из 5 звезд5/5 (2)
- Empires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldОт EverandEmpires of Light: Edison, Tesla, Westinghouse, and the Race to Electrify the WorldРейтинг: 4 из 5 звезд4/5 (87)
- Retro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsОт EverandRetro Gaming with Raspberry Pi: Nearly 200 Pages of Video Game ProjectsОценок пока нет
- Electric Powertrain: Energy Systems, Power Electronics and Drives for Hybrid, Electric and Fuel Cell VehiclesОт EverandElectric Powertrain: Energy Systems, Power Electronics and Drives for Hybrid, Electric and Fuel Cell VehiclesОценок пока нет
- Power Quality in Power Systems and Electrical MachinesОт EverandPower Quality in Power Systems and Electrical MachinesРейтинг: 4.5 из 5 звезд4.5/5 (11)