Вам также может понравиться
- Especialización ETABS 2015 & SAFE 2014 PDFДокумент97 страницEspecialización ETABS 2015 & SAFE 2014 PDFSergio RoqueОценок пока нет
- Analisis SismicoДокумент20 страницAnalisis SismicoJorgeRiveraОценок пока нет
- Ex Parcial 2015 - SoluciónДокумент5 страницEx Parcial 2015 - SoluciónDiegoОценок пока нет
- Calculo Precipitaciones MaximasДокумент18 страницCalculo Precipitaciones MaximasLenhart Vampyyri Ja KorppiОценок пока нет
- Segundo Trabajo de Sismos - InformeДокумент13 страницSegundo Trabajo de Sismos - InformemanuelОценок пока нет
- Lista de Ejercicios Metodos IterativosДокумент4 страницыLista de Ejercicios Metodos IterativosJose ValdiviaОценок пока нет
- Variaciones en La Rigidez de Las ColumnasДокумент5 страницVariaciones en La Rigidez de Las ColumnasKaty G-aОценок пока нет
- 1ra Practica SISMICA 2020 2Документ2 страницы1ra Practica SISMICA 2020 2Mayra Guerrero EncarnaciónОценок пока нет
- Linea de Saturacion 2do CJДокумент2 страницыLinea de Saturacion 2do CJCristian RamosОценок пока нет
- Sílabo Concreto Armado I - 2017-I Ing. Ovidio Serrano ZeladaДокумент12 страницSílabo Concreto Armado I - 2017-I Ing. Ovidio Serrano ZeladaArliintOn Edwin Cuyán BarbozaОценок пока нет
- Sistemas de Control para La Protección de Estructuras Civiles Sometidas A Cargas DinámicasДокумент19 страницSistemas de Control para La Protección de Estructuras Civiles Sometidas A Cargas DinámicasJose Carlos GüemesОценок пока нет
- Diseño de Bocatoma, Desripiador y DesarenadorДокумент15 страницDiseño de Bocatoma, Desripiador y DesarenadorJuan Guillermo Díaz MontenegroОценок пока нет
- Predimensionamiento de v. Madera e Inst. para Usar El ExcelДокумент8 страницPredimensionamiento de v. Madera e Inst. para Usar El Excelmecanico_FEMОценок пока нет
- Analisis Sismico EstaticoДокумент23 страницыAnalisis Sismico EstaticoVictor Rene H. R.100% (1)
- Columnas BiaxialesДокумент27 страницColumnas BiaxialessantosОценок пока нет
- Comparacion de La Norma E.030 2009 - 2016Документ36 страницComparacion de La Norma E.030 2009 - 2016Lex Tito Cardenas Saldaña57% (7)
- Universidad Mayor Real Y Pontificia de San Francisco Xavier de ChuquisacaДокумент27 страницUniversidad Mayor Real Y Pontificia de San Francisco Xavier de ChuquisacaJoelОценок пока нет
- Sismología e Ingeniería SismológicaДокумент7 страницSismología e Ingeniería SismológicaCharlesSonccoCutyОценок пока нет
- Puente PeatonalДокумент13 страницPuente PeatonalaquilesanchezОценок пока нет
- Albañileria1.UDH - Fi OkДокумент9 страницAlbañileria1.UDH - Fi OkCesar Berrospi HuaytanОценок пока нет
- Problema 2Документ5 страницProblema 2Elizabeth Roque RamosОценок пока нет
- Examen Ingenieria Sismo ResistenteДокумент8 страницExamen Ingenieria Sismo ResistenteVíctor Vásquez BordaОценок пока нет
- Diseño de Un Puente de Hormigon PreesforzadoДокумент34 страницыDiseño de Un Puente de Hormigon PreesforzadoRoberto TórrezОценок пока нет
- Deber N° - Combinaciones ModalesДокумент9 страницDeber N° - Combinaciones ModalesJessica MendezОценок пока нет
- Diseño Estructural Entrega 1 PDFДокумент21 страницаDiseño Estructural Entrega 1 PDFDavid StevenОценок пока нет
- Estrada Porras Franz EmmanuelДокумент6 страницEstrada Porras Franz EmmanuelOdar GarciaОценок пока нет
- 3 - IDF - El Alto PDFДокумент2 страницы3 - IDF - El Alto PDFRoni VenerosОценок пока нет
- Clase N°1 SudsДокумент32 страницыClase N°1 SudsmortaltychoОценок пока нет
- Patologia en Diseño y Construcion de PuentesДокумент15 страницPatologia en Diseño y Construcion de PuentesAngela MorinОценок пока нет
- Excel FisicaДокумент4 страницыExcel FisicaDAYANNI09Оценок пока нет
- Diaz TBДокумент266 страницDiaz TBilder rosasОценок пока нет
- Viga AASHTOДокумент6 страницViga AASHTOJavier PiconОценок пока нет
- CuestionarioДокумент5 страницCuestionarioFransay T Acuña CОценок пока нет
- Análisis Sísmico Estático Lineal Elástico PDFДокумент19 страницAnálisis Sísmico Estático Lineal Elástico PDFWilliams Quispe RamosОценок пока нет
- Memoria de Cálculo Estrutural Reservorio 250 M3Документ11 страницMemoria de Cálculo Estrutural Reservorio 250 M3juan carlos jimenezОценок пока нет
- Diseno Por CapacidadДокумент8 страницDiseno Por CapacidadJason WebbОценок пока нет
- Metodo Estatico y Dinamico para El Analisis SismicoДокумент8 страницMetodo Estatico y Dinamico para El Analisis Sismicojavier roque fabiaОценок пока нет
- Calculos de Albañileria ConfinadaДокумент68 страницCalculos de Albañileria ConfinadaHerbert Goizueta MitmaОценок пока нет
- Puentes LosaДокумент24 страницыPuentes LosaManuel J. GoОценок пока нет
- E Structur AsДокумент133 страницыE Structur AsmayjoОценок пока нет
- Dinamica de Suelos PDFДокумент36 страницDinamica de Suelos PDFliz palomino zegarraОценок пока нет
- Analisis Modal de Las EstructurasДокумент15 страницAnalisis Modal de Las EstructurasEdison Ricardo Cedeño Ripalda100% (1)
- Matriz de Rigidez 1ra SerieДокумент15 страницMatriz de Rigidez 1ra SerieJorge OsorioОценок пока нет
- Falla en Columnas Grupo 1 y 2Документ18 страницFalla en Columnas Grupo 1 y 2Meraki NeОценок пока нет
- Tipos de Dibujo TecnicoДокумент3 страницыTipos de Dibujo TecnicoAnayanci NavarroОценок пока нет
- Diseño Escalera Dos Tramos, NuevoДокумент10 страницDiseño Escalera Dos Tramos, NuevoEdgar VasquezОценок пока нет
- Porticos-2 Niveles Con Volado.Документ7 страницPorticos-2 Niveles Con Volado.LUIS HERNANОценок пока нет
- Estructuras - PlasticidadДокумент27 страницEstructuras - Plasticidadjolrael2kОценок пока нет
- Coeficientes de Irregularidad en PlantaДокумент4 страницыCoeficientes de Irregularidad en Plantaeddyson1095Оценок пока нет
- Practica N3 - ES831 G-2020 - 01Документ4 страницыPractica N3 - ES831 G-2020 - 01OSCAR DAVID LUQUE CHIPANAОценок пока нет
- Trabajo para Curso Básico de SAP 2000 XNC PDFДокумент26 страницTrabajo para Curso Básico de SAP 2000 XNC PDFXavier NietoОценок пока нет
- Losas 5 Losas Sin VigasДокумент63 страницыLosas 5 Losas Sin VigasGustavo RuizОценок пока нет
- Trabajo Final Diseño Básico Estructural de Acero PDFДокумент23 страницыTrabajo Final Diseño Básico Estructural de Acero PDFximena rizzoОценок пока нет
- Métodos o Medidas de Estabilización de TaludesДокумент4 страницыMétodos o Medidas de Estabilización de TaludesCésar R. SaavedraОценок пока нет
- Estructura Postensada PDFДокумент8 страницEstructura Postensada PDFIsaias CorzaОценок пока нет
- Diseño de BocatomaДокумент5 страницDiseño de BocatomaLuis CordovaОценок пока нет
- Lectura Semana 4Документ10 страницLectura Semana 4dawilber gamarraОценок пока нет
- Menú Principal: Estructuras Sismoresistentes. Analisis Modal Espectral. Capítulo 2Документ11 страницMenú Principal: Estructuras Sismoresistentes. Analisis Modal Espectral. Capítulo 2Rildo Kenyi Apaza TitoОценок пока нет
- Trabajo 01Документ21 страницаTrabajo 01RolandAvilaJulcaОценок пока нет
- Estos Son Nuestros DerechosДокумент4 страницыEstos Son Nuestros DerechosJonathan Arce RomeroОценок пока нет
- La Estructuracion de EdificiosДокумент42 страницыLa Estructuracion de EdificiosYoulyr Michael Melendez SevillanoОценок пока нет
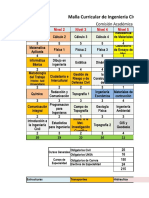
- Malla Curricular IC UNSA 2016 REV 0 27 Sep2016aДокумент131 страницаMalla Curricular IC UNSA 2016 REV 0 27 Sep2016aJonathan Arce RomeroОценок пока нет
- Ataque de SulfatosДокумент30 страницAtaque de SulfatosJonathan Arce RomeroОценок пока нет
- 321 051Документ11 страниц321 051Jonathan Arce RomeroОценок пока нет
- 321 051Документ11 страниц321 051Jonathan Arce RomeroОценок пока нет
- Unknown000002 PDFДокумент11 страницUnknown000002 PDFWardencasianAlanisОценок пока нет
- Modelos de Sistemas de Primer y Segundo OrdenДокумент7 страницModelos de Sistemas de Primer y Segundo OrdenAlejandro Mario Alcala GranjaОценок пока нет
- CUÁNTICA - Cap3 - Estacionarios y No Estacionarios - 2017Документ19 страницCUÁNTICA - Cap3 - Estacionarios y No Estacionarios - 2017mjkoОценок пока нет
- Ley Del Enfriamiento de NewtonДокумент8 страницLey Del Enfriamiento de Newtonelmer33Оценок пока нет
- Simulacion de Sistemas Reaccion-Transporte Mediante Formulaciones de Ecuaciones IntegralesДокумент147 страницSimulacion de Sistemas Reaccion-Transporte Mediante Formulaciones de Ecuaciones IntegralesjegreluОценок пока нет
- Ecuaciones Diferenciales de Primer OrdenДокумент36 страницEcuaciones Diferenciales de Primer OrdenMiguel Flores100% (25)
- Problemas de Valor Inicial y de FronteraДокумент6 страницProblemas de Valor Inicial y de FronteraFreddy Calua Infante100% (1)
- Deducción en Coordenadas CilíndricasДокумент4 страницыDeducción en Coordenadas CilíndricasRoberto Tuyub RodriguezОценок пока нет
- Semana 15. EDO de Orden Superior y SEDOДокумент3 страницыSemana 15. EDO de Orden Superior y SEDOjamesproz2Оценок пока нет
- Ecuaciones Diferenciales de Segundo OrdenДокумент3 страницыEcuaciones Diferenciales de Segundo Ordenjosue B rengifoОценок пока нет
- Webconferencia Etapa 3Документ15 страницWebconferencia Etapa 3Miguel RodriguezОценок пока нет
- Ecuaciones Diferenciales Como Modelos MatematicosДокумент54 страницыEcuaciones Diferenciales Como Modelos MatematicosRobinson Velasquez83% (6)
- El WronskianoДокумент6 страницEl WronskianoDANNA MARIETTE PAGAZA ARENASОценок пока нет
- S2 B1B3 2022 10 PautaДокумент6 страницS2 B1B3 2022 10 PautaCata BОценок пока нет
- Historia y ActualidadДокумент34 страницыHistoria y ActualidadDaniel CastroОценок пока нет
- Unidad 2 - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaДокумент10 страницUnidad 2 - Etapa 2 - Modelar El Sistema Dinámico en El Dominio de La FrecuenciaPablo ForeroОценок пока нет
- 7722 (Syc) Métodos Numéricos para Ingenieros2015Документ7 страниц7722 (Syc) Métodos Numéricos para Ingenieros2015Ernesto SanchezОценок пока нет
- Tutorial MapleДокумент127 страницTutorial MapleDavid BacaОценок пока нет
- Actividad 3. Resolucion de EjerciciosДокумент4 страницыActividad 3. Resolucion de EjerciciosSteven NarváezОценок пока нет
- Metodos Computacionales para Ingenieria Raffo Lecca 2010 I Cuarto CicloДокумент3 страницыMetodos Computacionales para Ingenieria Raffo Lecca 2010 I Cuarto CicloItalo QuirozОценок пока нет
- Consulta ConsolidacionДокумент11 страницConsulta ConsolidacionYISSETH CAMILA ESPEJO FARFANОценок пока нет
- Apuntes de Ecuaciones Diferenciales-V3Документ161 страницаApuntes de Ecuaciones Diferenciales-V3Adalberto Morales100% (1)
- Ecuaciones Diferenciales Exactas1Документ4 страницыEcuaciones Diferenciales Exactas1Joel ValdesОценок пока нет
- Reporte de Expocicion Variables SeparablesДокумент7 страницReporte de Expocicion Variables SeparablesRafael TeranОценок пока нет
- ModelamientoДокумент72 страницыModelamientoleonardoОценок пока нет
- Tarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden Superior 3Документ10 страницTarea 3 - Presentar Evaluación Ecuaciones Diferenciales de Primer Orden y Orden Superior 3Ledherzon ContrerasОценок пока нет
- Ecuaciones Diferenciales Orden SuperiorДокумент8 страницEcuaciones Diferenciales Orden SuperiorPaul VitoОценок пока нет
- Tema 2 - Ecuaciones Diferenciales de Primer Orden (1era Parte)Документ13 страницTema 2 - Ecuaciones Diferenciales de Primer Orden (1era Parte)luisgonzalo.martinezОценок пока нет
- Ejercicio 2Документ2 страницыEjercicio 2YOHAN ARGIRO MIRAОценок пока нет
- Operaciones Unitarias 2 - Resumen 3Документ5 страницOperaciones Unitarias 2 - Resumen 3Erick MecaОценок пока нет