Вам также может понравиться
- Power Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlОт EverandPower Electronics Applied to Industrial Systems and Transports, Volume 2: Power Converters and their ControlРейтинг: 5 из 5 звезд5/5 (1)
- MSE310-2016 Lecture Notes 3.0-3.1.5 (Student) PDFДокумент63 страницыMSE310-2016 Lecture Notes 3.0-3.1.5 (Student) PDFRanaОценок пока нет
- Motor Drives BY K .Sunil Kumar Griet-Power ElectronicsДокумент4 страницыMotor Drives BY K .Sunil Kumar Griet-Power ElectronicsKalyan KumarОценок пока нет
- Module 3 AC Generators Transformers AC MotorsДокумент57 страницModule 3 AC Generators Transformers AC MotorsEme Elibe Johnson EmestarОценок пока нет
- Electrical Machines Lab ManualДокумент41 страницаElectrical Machines Lab Manualsohaib hashmatОценок пока нет
- Note 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsДокумент13 страницNote 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsSapath Narsingh BogatiОценок пока нет
- DC MachineДокумент20 страницDC MachineTammanurRaviОценок пока нет
- The Direct Current (DC) Motor - Principle of OperationДокумент5 страницThe Direct Current (DC) Motor - Principle of OperationEdison EstrellaОценок пока нет
- EMMA Unit 2 Mathematical Model of DC Shunt MotorДокумент15 страницEMMA Unit 2 Mathematical Model of DC Shunt MotorSaikumar NemalikantiОценок пока нет
- Industrial Machines IiДокумент26 страницIndustrial Machines IiIsaac KimaruОценок пока нет
- Eee 2303 Electrical MachinesДокумент7 страницEee 2303 Electrical MachinesKOSGEI CORNELLIUS KIPTANUI EE102/G/5632/18Оценок пока нет
- AEEE 352 Assignment 3Документ10 страницAEEE 352 Assignment 3mchris91Оценок пока нет
- Wind Electric Generators and Control: Isha T.BДокумент9 страницWind Electric Generators and Control: Isha T.BeuginepaulОценок пока нет
- Modelling and Simulation: Wind Turbine GeneratorДокумент7 страницModelling and Simulation: Wind Turbine GeneratorEléctrico IngenieríaОценок пока нет
- Analysis of Brushless Three-Phase Synchronous Generator Without ExciterДокумент10 страницAnalysis of Brushless Three-Phase Synchronous Generator Without ExciterJuan Andres Rojas SerranoОценок пока нет
- ProjectДокумент25 страницProjectAsif MuhammadОценок пока нет
- D C Motors: Irect UrrentДокумент32 страницыD C Motors: Irect UrrentNeelam Prabhu-GaunkarОценок пока нет
- Regenerative Braking of Induction MotorДокумент27 страницRegenerative Braking of Induction MotorcoolkannaОценок пока нет
- Unit 1: The Power System Overview and ModelingДокумент8 страницUnit 1: The Power System Overview and ModelingIhuhwa Marta TauОценок пока нет
- ASEE-Energy Conversion and Conservation-2012Документ13 страницASEE-Energy Conversion and Conservation-2012sunshine heavenОценок пока нет
- 3.chapter Three-Starting System 1Документ21 страница3.chapter Three-Starting System 1Ahmed M MerzaОценок пока нет
- Circuit Simulation of A BLDC MotorДокумент4 страницыCircuit Simulation of A BLDC MotorjpmacabascoОценок пока нет
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsДокумент4 страницыCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaОценок пока нет
- Module 3Документ19 страницModule 3Pragati ShindeОценок пока нет
- Lab 3abДокумент16 страницLab 3abLiaqat AliОценок пока нет
- Electric Power SystemДокумент9 страницElectric Power SystemSuterm SeccionОценок пока нет
- DC Motors: 2.0 ObjectivesДокумент16 страницDC Motors: 2.0 ObjectivesBelayet RonyОценок пока нет
- Electrical Machines-Ch2-DcmotorДокумент93 страницыElectrical Machines-Ch2-DcmotoradamwaizОценок пока нет
- DC Machine FundamentalsДокумент13 страницDC Machine FundamentalsJamesDelmanОценок пока нет
- TASK:2: 1.generators and Motors 2.trasnformersДокумент24 страницыTASK:2: 1.generators and Motors 2.trasnformersFaiza Tabassam 546-FET/BSEE/F19Оценок пока нет
- Electrial Machines Second ReportДокумент7 страницElectrial Machines Second ReportMohamed YahiaОценок пока нет
- 418 DallasДокумент6 страниц418 DallasbaradaranhamidОценок пока нет
- EE6504 Electrical Machines-II (2 Mark Q & A) PDFДокумент16 страницEE6504 Electrical Machines-II (2 Mark Q & A) PDFUnknownОценок пока нет
- 2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1Документ6 страниц2011 Implementation and Control of An Acdcac Converter For Electric Vehicle Application1ashikhmd4467Оценок пока нет
- Edexcel National Certificate/Diploma Unit 67 - Further Electrical Principles NQF Level 3 Outcome 1 Tutorial 3 - Direct Current MotorsДокумент11 страницEdexcel National Certificate/Diploma Unit 67 - Further Electrical Principles NQF Level 3 Outcome 1 Tutorial 3 - Direct Current MotorsRem AremaniaОценок пока нет
- Electrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4Документ250 страницElectrical Machine II: EEEEC11 (3 - 0 - 2) Semester 4sanjoni.jainОценок пока нет
- Experimental and Simulation StudyДокумент10 страницExperimental and Simulation Studyمحمد عامرОценок пока нет
- A Common-Mode Voltage Reduction Strategy For AДокумент6 страницA Common-Mode Voltage Reduction Strategy For Amalini72Оценок пока нет
- Different Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesДокумент7 страницDifferent Braking Techniques Employed To A Brushless DC Motor Drive Used in LocomotivesKidus DawitОценок пока нет
- DC MotorsДокумент25 страницDC MotorsRajendra Prasad SanapalaОценок пока нет
- DC MotorДокумент8 страницDC Motorven_avv3382Оценок пока нет
- Control of An Electrical Machine: I C I C T C Is A Factor Depending On The Structure of The MachineДокумент21 страницаControl of An Electrical Machine: I C I C T C Is A Factor Depending On The Structure of The MachinenysretОценок пока нет
- Modelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesДокумент7 страницModelling, Simulation and Analysis of Doubly Fed Induction Generator For Wind TurbinesskrtamilОценок пока нет
- Motor, Electric Traction and Electrical Control Trainer YL-195Документ41 страницаMotor, Electric Traction and Electrical Control Trainer YL-195jhgffdfdffОценок пока нет
- EM-2 Unit-3 Notes (R20) - 1Документ48 страницEM-2 Unit-3 Notes (R20) - 1tripgokarna08Оценок пока нет
- DcdrivesДокумент17 страницDcdrivesMogaka LucasОценок пока нет
- DC Motor Lecture 3Документ27 страницDC Motor Lecture 3Fira tubeОценок пока нет
- Transients in Doubly-Fed Induction Machines Due To Supply Voltage SagsДокумент4 страницыTransients in Doubly-Fed Induction Machines Due To Supply Voltage SagsArun RajendranОценок пока нет
- Induction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareДокумент6 страницInduction Motor Control by Vector Control Method.: Miss. Bhagyashree Thool, Miss. Kalyani C. WakhareASumeethKumarОценок пока нет
- Motor AC Generator (Alternator) TransformerДокумент17 страницMotor AC Generator (Alternator) Transformeranon_644275375Оценок пока нет
- High Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerДокумент16 страницHigh Performance Rectifier - Multilevel Inverter Based BLDC Motor Drive With PI ControllerMohammed AltamimyОценок пока нет
- Electrical Technology (15A02306) : Lecture Notes B.TechДокумент60 страницElectrical Technology (15A02306) : Lecture Notes B.Techabdul kareemОценок пока нет
- Electric MachineДокумент24 страницыElectric Machinemakram.22en498Оценок пока нет
- DC Motor PrimerДокумент26 страницDC Motor PrimerastroltravlerОценок пока нет
- The Dynamic Response of A Linear Brushless D.C. S. MoghaniДокумент4 страницыThe Dynamic Response of A Linear Brushless D.C. S. Moghaniflorin91Оценок пока нет
- Upec 2Документ7 страницUpec 2manjusingОценок пока нет
- Analysis and Simulation of The High-Speed Torque Performance of BrushleДокумент10 страницAnalysis and Simulation of The High-Speed Torque Performance of BrushlePhạm Văn TưởngОценок пока нет
- DC MotorsДокумент25 страницDC MotorsBruceОценок пока нет
- Assignment # 7Документ14 страницAssignment # 7Jay EyОценок пока нет
- Ijs DR 1611003Документ13 страницIjs DR 1611003mohammed.abdullaОценок пока нет
- Lighting DesignДокумент1 страницаLighting Designyohannes getachewОценок пока нет
- Solawatt Small Area 12V Solar ModulesДокумент2 страницыSolawatt Small Area 12V Solar Modulesyohannes getachewОценок пока нет
- WheatFromFieldToFlour PDFДокумент40 страницWheatFromFieldToFlour PDFalbisperezОценок пока нет
- Math (Java Platform SE 8)Документ1 страницаMath (Java Platform SE 8)yohannes getachewОценок пока нет
- Muler 2Документ8 страницMuler 2yohannes getachewОценок пока нет
- Design CalculationДокумент2 страницыDesign Calculationyohannes getachewОценок пока нет
- Electric Power Distribution.2.0Документ5 страницElectric Power Distribution.2.0Saghir AhmadОценок пока нет
- Thesis FulltextДокумент144 страницыThesis Fulltextyohannes getachewОценок пока нет
- Technical Aspects of Grid InterconnectionДокумент35 страницTechnical Aspects of Grid Interconnectionamrit403Оценок пока нет
- Voltage, Current, Resistance, and Ohm's Law: Available Online atДокумент13 страницVoltage, Current, Resistance, and Ohm's Law: Available Online atyohannes getachewОценок пока нет
- Corrente e ResistênciaДокумент28 страницCorrente e ResistênciagabrielcvasОценок пока нет
- Addis Ababa UniversityДокумент1 страницаAddis Ababa Universityyohannes getachewОценок пока нет
- Voltage, Current, Resistance, and Ohm's Law: Available Online atДокумент13 страницVoltage, Current, Resistance, and Ohm's Law: Available Online atyohannes getachewОценок пока нет
- Corrente e ResistênciaДокумент28 страницCorrente e ResistênciagabrielcvasОценок пока нет
- PolynomialДокумент14 страницPolynomialyohannes getachewОценок пока нет
- Corrente e ResistênciaДокумент28 страницCorrente e ResistênciagabrielcvasОценок пока нет
- Corrente e ResistênciaДокумент28 страницCorrente e ResistênciagabrielcvasОценок пока нет
- Electpsricity From FootstepsДокумент4 страницыElectpsricity From FootstepsTirthankar Datta0% (1)
- Introduction and BackgroundДокумент8 страницIntroduction and Backgroundyohannes getachewОценок пока нет
- Electric Power Generation Transmission and DistriElectric Power Generation Transmission and DistributionbutionДокумент42 страницыElectric Power Generation Transmission and DistriElectric Power Generation Transmission and Distributionbutionamrit40356% (9)
- Fabrication of Human Footsteps Power GenerationДокумент6 страницFabrication of Human Footsteps Power Generationyohannes getachewОценок пока нет
- Electric Power GenerationДокумент257 страницElectric Power GenerationJaber ElabbasОценок пока нет
- 1910.269: Electric Power Generation, Transmission, and DistributionДокумент108 страниц1910.269: Electric Power Generation, Transmission, and DistributionAwais TahirОценок пока нет
- Crosman 764SB Parts ListДокумент3 страницыCrosman 764SB Parts ListMarilynОценок пока нет
- Bowling - Service - Parts - 28-201739-000 - Rev - 9-2014 BRUNSWICKДокумент318 страницBowling - Service - Parts - 28-201739-000 - Rev - 9-2014 BRUNSWICKroberto dominguezОценок пока нет
- Product Features Product Features: AC150-1A AC150-2C AC150-3C AC150-6CДокумент1 страницаProduct Features Product Features: AC150-1A AC150-2C AC150-3C AC150-6CYesenia Jaime RoaОценок пока нет
- Airdryers: HamrinДокумент30 страницAirdryers: HamrinGuillermoОценок пока нет
- Generator Synchronizing Relay: M M M M M M M MДокумент2 страницыGenerator Synchronizing Relay: M M M M M M M MDINESH CHATAPОценок пока нет
- Franks AutoclavesДокумент24 страницыFranks AutoclavesMariana AmayaОценок пока нет
- Uputstvo Za UpotrebuДокумент88 страницUputstvo Za UpotrebuMarko ZaricОценок пока нет
- PCF7941 Philips PDFДокумент1 страницаPCF7941 Philips PDFRafael OlaveОценок пока нет
- Mriya SII NE88 (Automatic Chrono)Документ1 страницаMriya SII NE88 (Automatic Chrono)SRI, Lda.Оценок пока нет
- Finding Top Center Position For No. 1 PistonДокумент14 страницFinding Top Center Position For No. 1 PistonTuan Anh100% (1)
- ZMZ-514 (Diesel) - SpecificationsДокумент12 страницZMZ-514 (Diesel) - SpecificationsGurpreet SinghОценок пока нет
- D4B802A2B8E Gearbox - 0D9 DSGДокумент153 страницыD4B802A2B8E Gearbox - 0D9 DSGAndrei Baluse75% (4)
- Partes de Patines JOSTДокумент2 страницыPartes de Patines JOSTalejandroОценок пока нет
- Digital Multimeter 98025Документ8 страницDigital Multimeter 98025123anthonyОценок пока нет
- 10EДокумент12 страниц10ELuis MurilloОценок пока нет
- S9H1D-H4 Wdg.63 - Technical Data SheetДокумент9 страницS9H1D-H4 Wdg.63 - Technical Data SheetAkram SulaimanОценок пока нет
- Inertia Dynamic TypeFSB SpecsheetДокумент4 страницыInertia Dynamic TypeFSB SpecsheetElectromateОценок пока нет
- NEC Art 314 314.16 Number of Conductors in Boxes and Conduit BodiesДокумент7 страницNEC Art 314 314.16 Number of Conductors in Boxes and Conduit BodiesroyvindasОценок пока нет
- Three Phase Star DeltaДокумент20 страницThree Phase Star DeltaSyed MohsinОценок пока нет
- Syncon Webinar 2020 Dec Presented 2020DECДокумент34 страницыSyncon Webinar 2020 Dec Presented 2020DECmassimocalviОценок пока нет
- Totalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060Документ56 страницTotalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060 Totalgas Module 8060dieguini1Оценок пока нет
- SCI Merchant Steel Fittings PDFДокумент6 страницSCI Merchant Steel Fittings PDFMohammed ZabiОценок пока нет
- ANSI A9220 Machine Design InfographicДокумент1 страницаANSI A9220 Machine Design InfographicMohammadhossein SahlabadiОценок пока нет
- Real Time Clock With Alarm Option Using AT89S52 and DS1307 ICДокумент13 страницReal Time Clock With Alarm Option Using AT89S52 and DS1307 ICkattaa1993Оценок пока нет
- Manual Placa Baza ASUS X99 DELUXEДокумент146 страницManual Placa Baza ASUS X99 DELUXELiviu Gabriel Mares100% (1)
- 11kV Cable Jointing TriplexДокумент1 страница11kV Cable Jointing TriplexyudhagaulОценок пока нет
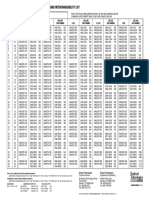
- Heli-Coil Metric Inserts Aerospace Standard Interchangeability ListДокумент2 страницыHeli-Coil Metric Inserts Aerospace Standard Interchangeability ListshadiОценок пока нет
- Form Inspection Premob - Quarterly (1) - 2Документ26 страницForm Inspection Premob - Quarterly (1) - 2Ryan RhamdhaniОценок пока нет
- Vehicle Identification: Certification Label Chassis NumberДокумент3 страницыVehicle Identification: Certification Label Chassis NumberAdamОценок пока нет
- Building Utilities Module 2 Lesson 3Документ7 страницBuilding Utilities Module 2 Lesson 3Bryan ManlapigОценок пока нет