Вам также может понравиться
- Matrix Analysis (Rajendra Bathia - Springer)Документ360 страницMatrix Analysis (Rajendra Bathia - Springer)André Rojas100% (4)
- Quad Loop Extender ModuleДокумент4 страницыQuad Loop Extender ModuleBeast NQОценок пока нет
- Termometr 1-Wire DS18B20Документ22 страницыTermometr 1-Wire DS18B20Neznanog Junaka Sest VranjeОценок пока нет
- DS18B20 - Programmable Resolution 1 Wire ThermometerДокумент22 страницыDS18B20 - Programmable Resolution 1 Wire ThermometerKathryn WorkmanОценок пока нет
- DS18S20 High-Precision 1-Wire Digital Thermometer: Features Pin ConfigurationsДокумент23 страницыDS18S20 High-Precision 1-Wire Digital Thermometer: Features Pin Configurationsdusan1962Оценок пока нет
- DS18B20X Flipchip 1-Wire Digital Thermometer: Features Pin AssignmentДокумент27 страницDS18B20X Flipchip 1-Wire Digital Thermometer: Features Pin AssignmentizarrajanaОценок пока нет
- DS18S20 High-Precision 1-Wire Digital Thermometer: General Description Benefits and FeaturesДокумент21 страницаDS18S20 High-Precision 1-Wire Digital Thermometer: General Description Benefits and FeatureszavirkОценок пока нет
- DS18B20 Programmable Resolution 1-Wire Digital Thermometer: General Description Benefits and FeaturesДокумент20 страницDS18B20 Programmable Resolution 1-Wire Digital Thermometer: General Description Benefits and FeaturesBowo Yuli PrasetyoОценок пока нет
- DS1820 MAXIM High-Precision 1-Wire Digital ThermometerДокумент4 страницыDS1820 MAXIM High-Precision 1-Wire Digital Thermometerelgremio1Оценок пока нет
- DS1822-PAR TermoparДокумент19 страницDS1822-PAR TermoparJohnny BarrenoОценок пока нет
- DS18B20Документ25 страницDS18B20Duta HastaОценок пока нет
- DS1620Документ12 страницDS1620Luis LópezОценок пока нет
- DS1621 Digital Thermometer and Thermostat: Features Pin AssignmentДокумент16 страницDS1621 Digital Thermometer and Thermostat: Features Pin AssignmentlgojfОценок пока нет
- DS18S20 High-Precision 1-Wire Digital Thermometer: Features Pin ConfigurationsДокумент23 страницыDS18S20 High-Precision 1-Wire Digital Thermometer: Features Pin ConfigurationsSubodh KumarОценок пока нет
- Digital Thermometer Ds1620& PicДокумент5 страницDigital Thermometer Ds1620& Picsafet100% (2)
- 1-Wire Digital Thermometer DS18S20Документ23 страницы1-Wire Digital Thermometer DS18S20ErnestoОценок пока нет
- DS18B20Документ2 страницыDS18B20Leonardo MouraОценок пока нет
- Humidifier ProjectДокумент45 страницHumidifier ProjectdubstepoОценок пока нет
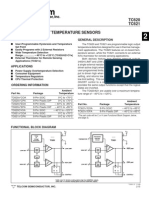
- TC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General DescriptionДокумент6 страницTC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General Descriptionmiki983Оценок пока нет
- Ds 1621Документ16 страницDs 1621AnassFouadОценок пока нет
- DS1620Документ13 страницDS1620help-me-quickОценок пока нет
- DS1624Документ17 страницDS1624superpuma86Оценок пока нет
- DS1621 Temperature SensorДокумент16 страницDS1621 Temperature SensorUsman MalikОценок пока нет
- DS1621Документ16 страницDS1621Martin JimenezОценок пока нет
- Digital Thermometer and Thermostat: DQ Clk/Conv RST GND V T T T DS1620S 8-Pin SOIC (208-Mil)Документ12 страницDigital Thermometer and Thermostat: DQ Clk/Conv RST GND V T T T DS1620S 8-Pin SOIC (208-Mil)jazmiinnОценок пока нет
- DS18B20 28978Документ23 страницыDS18B20 28978cancey2Оценок пока нет
- Max 6675Документ8 страницMax 6675david2014oooОценок пока нет
- DS1821 Programmable Digital Thermostat and Thermometer: Features Pin AssignmentДокумент19 страницDS1821 Programmable Digital Thermostat and Thermometer: Features Pin AssignmentJoako Sazo MatisenОценок пока нет
- Digital Termomether and Thermostat Ds1620Документ12 страницDigital Termomether and Thermostat Ds1620Javier LineraОценок пока нет
- DS1621 Digital Thermometer and Thermostat: Features Pin AssignmentДокумент16 страницDS1621 Digital Thermometer and Thermostat: Features Pin AssignmentAnisur RahmanОценок пока нет
- D T S K: Igital Emperature Ensor ITДокумент3 страницыD T S K: Igital Emperature Ensor ITPhilip BullasОценок пока нет
- ThermocoupleДокумент18 страницThermocoupleMuhammad IftikharОценок пока нет
- One Wire ProtocolДокумент22 страницыOne Wire ProtocolPiPo Tui100% (1)
- Complete 8-Bit A-to-D Converter AD570 : Ms 8C To +708C: AD570J 8C To +1258C: AD570SДокумент8 страницComplete 8-Bit A-to-D Converter AD570 : Ms 8C To +708C: AD570J 8C To +1258C: AD570SFida PyrtuhОценок пока нет
- Programmable Resolution 1-Wire Digital Thermometer: NC NC NC NC GND DQ V NCДокумент21 страницаProgrammable Resolution 1-Wire Digital Thermometer: NC NC NC NC GND DQ V NCjuno84Оценок пока нет
- DS18B20Документ4 страницыDS18B20elissaОценок пока нет
- Max 6675Документ8 страницMax 6675Jeremy WoodsОценок пока нет
- Sensor de Temperatura ds18b20Документ20 страницSensor de Temperatura ds18b20Victor VicmanОценок пока нет
- Grove Temperature and Humidity Sensor Sen11301pДокумент9 страницGrove Temperature and Humidity Sensor Sen11301pHariОценок пока нет
- Appkit:: Using The Ds1620 Digital Thermometer/ThermostatДокумент26 страницAppkit:: Using The Ds1620 Digital Thermometer/ThermostatMUHAMMAD SISWANTOROОценок пока нет
- ReportДокумент18 страницReportPhú ChuОценок пока нет
- DS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentДокумент27 страницDS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentaraikОценок пока нет
- DS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentДокумент27 страницDS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin AssignmentaraikОценок пока нет
- DS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin ConfigurationsДокумент22 страницыDS18B20 Programmable Resolution 1-Wire Digital Thermometer: Features Pin ConfigurationsRayne de SouzaОценок пока нет
- A Digital Temperature Meter Using An LM35 Temperature SensorДокумент10 страницA Digital Temperature Meter Using An LM35 Temperature SensorsunpnairОценок пока нет
- Tiny Serial Digital Thermal Sensor: Features General DescriptionДокумент16 страницTiny Serial Digital Thermal Sensor: Features General DescriptionKrychaОценок пока нет
- Product Manual 73 Tic 17Документ2 страницыProduct Manual 73 Tic 17Adam JacksonОценок пока нет
- Temperature Indicator-Cum - ControllerДокумент3 страницыTemperature Indicator-Cum - Controllerraghgk2012Оценок пока нет
- PIC PPT 13104022 (4th Year)Документ41 страницаPIC PPT 13104022 (4th Year)Daman Deep Singh100% (1)
- Ca3162 AДокумент7 страницCa3162 Ajnax101Оценок пока нет
- UCS1903 Datasheet PDFДокумент9 страницUCS1903 Datasheet PDFManuel SierraОценок пока нет
- DHT114Документ8 страницDHT114dennisflorianОценок пока нет
- Interfacing To The DS1631 Digital Thermometer and Thermostat in A Microcontroller EnvironmentДокумент12 страницInterfacing To The DS1631 Digital Thermometer and Thermostat in A Microcontroller Environmentrusty123xОценок пока нет
- CD 00003131Документ24 страницыCD 000031314131etasОценок пока нет
- Ca 3162Документ6 страницCa 3162JhonQFОценок пока нет
- Digital LED Thermometer with Microcontroller AVR ATtiny13От EverandDigital LED Thermometer with Microcontroller AVR ATtiny13Рейтинг: 5 из 5 звезд5/5 (1)
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142От EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142Оценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- One and Two Dimensional Xray DiffractionДокумент8 страницOne and Two Dimensional Xray DiffractionAndré RojasОценок пока нет
- Local Treatment of Electron Correlation-Svein SaeboДокумент24 страницыLocal Treatment of Electron Correlation-Svein SaeboAndré RojasОценок пока нет
- Quantum Optomechanics: Additional Resources For Physics TodayДокумент8 страницQuantum Optomechanics: Additional Resources For Physics TodayAndré RojasОценок пока нет
- Zurek 2014Документ7 страницZurek 2014André RojasОценок пока нет
- Physics Today: Quantum CriticalityДокумент8 страницPhysics Today: Quantum CriticalityAndré RojasОценок пока нет
- New Frontiers in Quantum Information With Atoms and Ions: Additional Resources For Physics TodayДокумент8 страницNew Frontiers in Quantum Information With Atoms and Ions: Additional Resources For Physics TodayAndré RojasОценок пока нет
- Demolishing Quantum Nondemolition: Articles You May Be Interested inДокумент2 страницыDemolishing Quantum Nondemolition: Articles You May Be Interested inAndré RojasОценок пока нет
- Journal of Mathematical Analysis and Applications: Süha YılmazДокумент8 страницJournal of Mathematical Analysis and Applications: Süha YılmazAndré RojasОценок пока нет
- Dead-Time Compensators. A SurveyДокумент22 страницыDead-Time Compensators. A SurveyAndré RojasОценок пока нет
- Journal of Geometry and Physics: Edwin Beggs, S. Paul SmithДокумент27 страницJournal of Geometry and Physics: Edwin Beggs, S. Paul SmithAndré RojasОценок пока нет
- Symplectic Geometry and Dissipative Differential Operators: Journal of Mathematical Analysis and ApplicationsДокумент16 страницSymplectic Geometry and Dissipative Differential Operators: Journal of Mathematical Analysis and ApplicationsAndré RojasОценок пока нет
- Leonssurlescoor 01 LamgoogДокумент407 страницLeonssurlescoor 01 LamgoogAndré RojasОценок пока нет
- (Applied Differential Geometry - Burke William) PDFДокумент430 страниц(Applied Differential Geometry - Burke William) PDFAndré Rojas100% (2)
- Crown StandardTCP IPPortДокумент5 страницCrown StandardTCP IPPortDavid Alejandro Quijada GilОценок пока нет
- Windows Printer Driver - Thermal Line Printer - Download - POS - EpsonДокумент1 страницаWindows Printer Driver - Thermal Line Printer - Download - POS - EpsonVictor HenriqueОценок пока нет
- Sales Engineer Electronic Security in Roanoke VA Resume Mark TrumpДокумент2 страницыSales Engineer Electronic Security in Roanoke VA Resume Mark TrumpMarkTrump2Оценок пока нет
- E TicketДокумент1 страницаE Ticketمحمد يوسفОценок пока нет
- GoldLine RTA30Документ4 страницыGoldLine RTA30SantiagoMangudoEscaladaОценок пока нет
- Order Form - Biznet Dedicated Internet Maret 2020Документ11 страницOrder Form - Biznet Dedicated Internet Maret 2020Wendi SopianОценок пока нет
- Exceltoci Troubleshooting GuideДокумент20 страницExceltoci Troubleshooting Guidemicheledorsey1922Оценок пока нет
- RRU-Remote Radio Unit: Function, Concept, Details: 1.: Definition and OverviewДокумент4 страницыRRU-Remote Radio Unit: Function, Concept, Details: 1.: Definition and OverviewJosé Angel Santiesteban RicardoОценок пока нет
- P Pap Guidelines 6190 Rev 3Документ5 страницP Pap Guidelines 6190 Rev 3Reshu RaiОценок пока нет
- Stryker Xenon 6000 Light Source: Troubleshooting GuideДокумент1 страницаStryker Xenon 6000 Light Source: Troubleshooting GuideHealthcare repair and serviceОценок пока нет
- Slides By: Andrew Stephenson Georgia Gwinnett CollegeДокумент22 страницыSlides By: Andrew Stephenson Georgia Gwinnett CollegeRamya GunukulaОценок пока нет
- Icfai: Enterprise-Wide Information SystemsДокумент45 страницIcfai: Enterprise-Wide Information SystemsrahulОценок пока нет
- Worksheet 8.1. Conditional AlgorithmsДокумент10 страницWorksheet 8.1. Conditional AlgorithmsYiineth DaniielaОценок пока нет
- Wind Speed Modelling Using Inverse Weibull Distrubition - A Case Study For B - Lec - K, Turkey (#299493) - 285602Документ5 страницWind Speed Modelling Using Inverse Weibull Distrubition - A Case Study For B - Lec - K, Turkey (#299493) - 285602CherinetОценок пока нет
- Electrical Design ProcessДокумент6 страницElectrical Design ProcessUsha HaОценок пока нет
- Compagne Di Collegio - I Racconti Erotici Migliori11Документ169 страницCompagne Di Collegio - I Racconti Erotici Migliori11kyleОценок пока нет
- Train Yourself To See Impossible Colors (PDF-Cópia de Um Site)Документ15 страницTrain Yourself To See Impossible Colors (PDF-Cópia de Um Site)FelipeEllerОценок пока нет
- Arduino Measurement Projects For BeginnersДокумент175 страницArduino Measurement Projects For BeginnersSimon Choquechambi Martinez100% (2)
- Particle Flow OrbazДокумент159 страницParticle Flow OrbazAna QuintanaОценок пока нет
- Designing and Maitenance of Control PanelДокумент40 страницDesigning and Maitenance of Control PanelVenomОценок пока нет
- Prototype-Based ProgrammingДокумент8 страницPrototype-Based ProgrammingAditya JainОценок пока нет
- Field Interviewer Cover LetterДокумент7 страницField Interviewer Cover Letterbcrqhr1n100% (2)
- PRO800 ES EL Datasheet 20210519Документ2 страницыPRO800 ES EL Datasheet 20210519john wardОценок пока нет
- Test Bank For Introduction To Java Programming Comprehensive Version 10Th Edition Liang 0133761312 9780133761313 Full Chapter PDFДокумент36 страницTest Bank For Introduction To Java Programming Comprehensive Version 10Th Edition Liang 0133761312 9780133761313 Full Chapter PDFjessica.talaga212100% (10)
- Complex Modulation BasicsДокумент69 страницComplex Modulation BasicsKashif VirkОценок пока нет
- Simulaids 2011 CatalogДокумент68 страницSimulaids 2011 CatalogAlfred De Jesús ToledoОценок пока нет
- Generating Ideas and Their RelationshipДокумент17 страницGenerating Ideas and Their RelationshipChenie Nhorine Fajanilan100% (1)
- Lecture Notes 2013Документ231 страницаLecture Notes 2013alper senemОценок пока нет
- CASE Tools Tutorial CASE Tools Tutorial CASE Tools Tutorial CASE Tools TutorialДокумент52 страницыCASE Tools Tutorial CASE Tools Tutorial CASE Tools Tutorial CASE Tools TutorialAleeza BukhariОценок пока нет