Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Durability of ConcreteДокумент31 страницаDurability of ConcreteTabish IzharОценок пока нет
- Propagation of EM WaveДокумент43 страницыPropagation of EM WaveVipul GargОценок пока нет
- Zero Stiffness Tensegrity StructuresДокумент15 страницZero Stiffness Tensegrity StructuresTabish IzharОценок пока нет
- About Some Tensegrity StructuresДокумент5 страницAbout Some Tensegrity StructuresTabish IzharОценок пока нет
- Part 8 PG 110 145 253Документ6 страницPart 8 PG 110 145 253Tabish IzharОценок пока нет
- Department of Civil Engineering.: Engineer'S EyeДокумент73 страницыDepartment of Civil Engineering.: Engineer'S EyeTabish IzharОценок пока нет
- Geotechnical Engineering - 1Документ1 страницаGeotechnical Engineering - 1Tabish IzharОценок пока нет
- Experimental Study On Mix Design of Pumpable Concrete: Tabish Izhar 13/CE/408 Dept. of Civil EngineeringДокумент21 страницаExperimental Study On Mix Design of Pumpable Concrete: Tabish Izhar 13/CE/408 Dept. of Civil EngineeringTabish Izhar0% (1)
- Angle of Repose/ Friction ф = 18 0.314 Unit Wt. of Soil ϒ = 16.677Документ3 страницыAngle of Repose/ Friction ф = 18 0.314 Unit Wt. of Soil ϒ = 16.677Tabish IzharОценок пока нет
- Load CalculationsДокумент10 страницLoad CalculationsTabish IzharОценок пока нет
- Comparision Code Mix CodesДокумент5 страницComparision Code Mix CodesTabish IzharОценок пока нет
- Canopy Detail Elevation - ModelДокумент1 страницаCanopy Detail Elevation - ModelTabish IzharОценок пока нет
- Technical Specification Canopy - MPДокумент10 страницTechnical Specification Canopy - MPTabish IzharОценок пока нет
- As/ Detail Struture Glazing As/ Detail 230 Thick Brick Wall: CanopyДокумент1 страницаAs/ Detail Struture Glazing As/ Detail 230 Thick Brick Wall: CanopyTabish IzharОценок пока нет
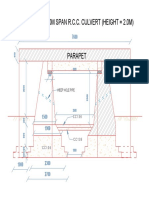
- Colvert Detail ModelДокумент1 страницаColvert Detail ModelTabish IzharОценок пока нет
- 2962-Zhang-Structure and Performance of LiFePO4 Cathode Materials-A ReviewДокумент9 страниц2962-Zhang-Structure and Performance of LiFePO4 Cathode Materials-A ReviewEllen7374Оценок пока нет
- CE363 Lab Book Eng Prop of Soils Bowles PDFДокумент249 страницCE363 Lab Book Eng Prop of Soils Bowles PDFFurkan YılmazОценок пока нет
- Introduction To Genral PhysicsДокумент15 страницIntroduction To Genral PhysicsمريمОценок пока нет
- 2nd Sem 2014 (S) and 5th & 6th Sem 2014 (W) Exam M.P CasesДокумент79 страниц2nd Sem 2014 (S) and 5th & 6th Sem 2014 (W) Exam M.P CasesKimet Chhendipada AngulОценок пока нет
- The Strain Gage Pressure TransducerДокумент7 страницThe Strain Gage Pressure TransducertbmariОценок пока нет
- Implementation of The Johnson-Holmquist II (JH-2) Constitutive Model Into DYNA3DДокумент52 страницыImplementation of The Johnson-Holmquist II (JH-2) Constitutive Model Into DYNA3DsafaatОценок пока нет
- Course Plan Mechanics 1 (BS Maths)Документ3 страницыCourse Plan Mechanics 1 (BS Maths)Ambreen KhanОценок пока нет
- Tutorial 5Документ1 страницаTutorial 5SHOURYA SINGHОценок пока нет
- CHE-221: Fluid Mechanics-I: Dr. Zaib JahanДокумент10 страницCHE-221: Fluid Mechanics-I: Dr. Zaib JahanBilal JuttОценок пока нет
- Kinematics DPP 2Документ2 страницыKinematics DPP 2Shahil AhmedОценок пока нет
- Conexión A Tierra Del Neutro de Los: Generadores en Plantas PetroquímicasДокумент6 страницConexión A Tierra Del Neutro de Los: Generadores en Plantas PetroquímicasSergio RodriguezОценок пока нет
- Science - 2ND SummativeДокумент2 страницыScience - 2ND SummativeericksonОценок пока нет
- M Us 22054 LC-WM Handbook Reva PDFДокумент120 страницM Us 22054 LC-WM Handbook Reva PDFneo43Оценок пока нет
- Pembahasan To 2020 2021Документ32 страницыPembahasan To 2020 2021Samantha Regina HanayoОценок пока нет
- Jacket Launching AnalysisДокумент7 страницJacket Launching Analysisiw2fualОценок пока нет
- OTC Paper 5358 Placement of Mat Suported JU Rig in Very Weak SoilДокумент12 страницOTC Paper 5358 Placement of Mat Suported JU Rig in Very Weak SoilbluedancerОценок пока нет
- Joints in Steel ConstructionДокумент82 страницыJoints in Steel ConstructionmileОценок пока нет
- F5-1-Wave Calculation Answer 2 PDFДокумент4 страницыF5-1-Wave Calculation Answer 2 PDFKhairul WarsОценок пока нет
- DR S S BhogaДокумент19 страницDR S S Bhogaapi-20005351Оценок пока нет
- Page No: 118: in Text QuestionsДокумент11 страницPage No: 118: in Text QuestionsVinod MalikОценок пока нет
- Uniform Linear ArrayДокумент5 страницUniform Linear ArrayBhargav SarvepalliОценок пока нет
- Thermal Physics Part 1: Steve BramwellДокумент44 страницыThermal Physics Part 1: Steve BramwellRoy VeseyОценок пока нет
- Analysis of Offshore Pipeline Allowable Free Span LengthДокумент8 страницAnalysis of Offshore Pipeline Allowable Free Span Lengtholin93Оценок пока нет
- Ee Gate 2004Документ20 страницEe Gate 2004Krishna Kant TripathiОценок пока нет
- Reflex KlystronДокумент24 страницыReflex KlystronHarshada Bansode100% (2)
- Frame Analysis PDFДокумент56 страницFrame Analysis PDFAKSОценок пока нет
- 23 NptelДокумент3 страницы23 NptelharshaОценок пока нет
- Stress Analysis Report PALLET 1255Документ19 страницStress Analysis Report PALLET 1255andresОценок пока нет
- Mole Concept IДокумент8 страницMole Concept ISohil Paudel100% (2)