Вам также может понравиться
- Final Self Hypnosis Paperback For PrintДокумент150 страницFinal Self Hypnosis Paperback For PrintRic Painter100% (12)
- Aiaa 1994 2105 454Документ13 страницAiaa 1994 2105 454scg0015Оценок пока нет
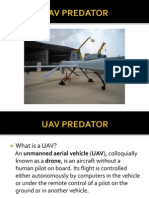
- Uav PredatorДокумент10 страницUav PredatorViperous PramodОценок пока нет
- Tutorial Sim MechanicsДокумент840 страницTutorial Sim MechanicsHernan Gonzalez100% (4)
- ASME UAV Engine CompetitionДокумент35 страницASME UAV Engine CompetitionbfehrmОценок пока нет
- LCA Tejas Brochure 2015Документ15 страницLCA Tejas Brochure 2015manojk_mОценок пока нет
- Aermacchi M-346 Brochure ENG NewДокумент11 страницAermacchi M-346 Brochure ENG NewThallez100% (1)
- Rocket Motor Design and Missile Flight Performance AnalysisДокумент70 страницRocket Motor Design and Missile Flight Performance Analysisbabak3316100% (1)
- Tuesday Landmark A Doug HaywardДокумент25 страницTuesday Landmark A Doug HaywardJose Juan Velazquez GarciaОценок пока нет
- Analysis of Modern Military Jet Trainer Aircraft PDFДокумент10 страницAnalysis of Modern Military Jet Trainer Aircraft PDFpuhumight100% (1)
- Aircraft Design Project Report 1Документ38 страницAircraft Design Project Report 1Kapil mОценок пока нет
- The Great Muslim Scientist - Imam Jaffer Sadiq (AДокумент78 страницThe Great Muslim Scientist - Imam Jaffer Sadiq (ASalman Book Centre100% (2)
- f15 Infographic PDFДокумент1 страницаf15 Infographic PDFamenendezam100% (1)
- Hypersonic Weapons Technology by Prof DR Ali SaroshДокумент18 страницHypersonic Weapons Technology by Prof DR Ali SaroshAli Sarosh100% (1)
- Aircraft Design Project - Bomber Aircraft-1-Converted FinalДокумент103 страницыAircraft Design Project - Bomber Aircraft-1-Converted FinalAbishekОценок пока нет
- The Sixth Generation Fighter: by John A. Tirpak, Executive EditorДокумент5 страницThe Sixth Generation Fighter: by John A. Tirpak, Executive Editornaveed100% (2)
- Jet Engine IntegrationДокумент8 страницJet Engine IntegrationZeeshan100% (1)
- SAFE RC Design ForДокумент425 страницSAFE RC Design ForMarlon Braggian Burgos FloresОценок пока нет
- Future Weapons: B-2 SpiritДокумент11 страницFuture Weapons: B-2 SpiritSaimon RahmanОценок пока нет
- UAV Specs PDFДокумент12 страницUAV Specs PDFMario Gómez Martínez100% (1)
- AGM-114 HellfireДокумент8 страницAGM-114 HellfireDaniel Linn HootonОценок пока нет
- Low Voltage Switchgear Specification: 1. ScopeДокумент6 страницLow Voltage Switchgear Specification: 1. ScopejendrikoОценок пока нет
- X 47B PDFДокумент2 страницыX 47B PDFezli007Оценок пока нет
- Aerotactic Company Ff-1 Rainbird: Presents TheДокумент80 страницAerotactic Company Ff-1 Rainbird: Presents TheBRAYAN SARОценок пока нет
- Aerospace Defense BrochureДокумент11 страницAerospace Defense Brochurehschoi12Оценок пока нет
- UAvДокумент26 страницUAvBoscoRajuОценок пока нет
- The Role of Drag Prediction in Combat Aircraft Design and DevelopmentДокумент6 страницThe Role of Drag Prediction in Combat Aircraft Design and DevelopmentLeiser HartbeckОценок пока нет
- Maneuverable SuperSonic AircraftДокумент174 страницыManeuverable SuperSonic AircraftRahul KaruvingalОценок пока нет
- Talon X CombustorДокумент9 страницTalon X CombustorSmruti Ranjan BeheraОценок пока нет
- Comparative Study of F-22 Raptor and Chengdu J-20: Instrumentation Science & Technology January 2016Документ5 страницComparative Study of F-22 Raptor and Chengdu J-20: Instrumentation Science & Technology January 2016Fikadie AregaОценок пока нет
- Manual de Operacion y MantenimientoДокумент236 страницManual de Operacion y MantenimientoalexОценок пока нет
- Sixth Gen Fighter AircraftДокумент8 страницSixth Gen Fighter AircraftHarsh Vardhan ThakurОценок пока нет
- WAAPI UAV Design ReportДокумент97 страницWAAPI UAV Design ReportAbhishek ChauhanОценок пока нет
- Ge Aviation To Use Ceramic Matrix Composites in Jet EnginesДокумент1 страницаGe Aviation To Use Ceramic Matrix Composites in Jet EnginesasimbuyukОценок пока нет
- Universal Armament Interface (UAI)Документ36 страницUniversal Armament Interface (UAI)seunghyun songОценок пока нет
- Iaf Ucav RfiДокумент4 страницыIaf Ucav RfiShiv AroorОценок пока нет
- AN-APG-63 3 DetalleДокумент5 страницAN-APG-63 3 DetalleJosé Luis DelgadoОценок пока нет
- The US Army's New Black Hawk Helicopter Replacement, The Bell v-280 Valor. (REVISED)Документ2 страницыThe US Army's New Black Hawk Helicopter Replacement, The Bell v-280 Valor. (REVISED)UthaОценок пока нет
- Rafale Deal PresentationДокумент6 страницRafale Deal PresentationShounak ChandraОценок пока нет
- Scenema M88 EngineДокумент1 страницаScenema M88 EngineDrSomnath999Оценок пока нет
- Current Trends and Issues in Nursing ManagementДокумент8 страницCurrent Trends and Issues in Nursing ManagementMadhu Bala81% (21)
- A400MДокумент29 страницA400MHikari Nazuha100% (1)
- Procter and Gamble - MarketingДокумент10 страницProcter and Gamble - MarketingIvana Panovska100% (5)
- Phazotron Zhuk AE/ASE: Assessing Russia's First Fighter AESAДокумент22 страницыPhazotron Zhuk AE/ASE: Assessing Russia's First Fighter AESAkab115121803100% (1)
- Kuchinski 1984Документ8 страницKuchinski 1984Đinh Ngọc Việt TùngОценок пока нет
- 160kW SOFT STARTER - TAP HOLE 1Документ20 страниц160kW SOFT STARTER - TAP HOLE 1Ankit Uttam0% (1)
- 72 UAV EnginesДокумент3 страницы72 UAV Enginesmhk665Оценок пока нет
- Ukrspecsystems PD 1Документ20 страницUkrspecsystems PD 1vinay sathenaОценок пока нет
- EL-2052 Aesa RadarДокумент2 страницыEL-2052 Aesa RadarDrSomnath9990% (1)
- Plaaf Elites PilotsДокумент37 страницPlaaf Elites Pilotsneetin vatsya100% (1)
- (174 Note1) (Note2) (Note3) : Transport Capabilities Range Type C-17 A400M Type C-17 A400M EconomicsДокумент1 страница(174 Note1) (Note2) (Note3) : Transport Capabilities Range Type C-17 A400M Type C-17 A400M Economicstomay777Оценок пока нет
- A Case On Marketing Strategy of Xiaomi IndiaДокумент39 страницA Case On Marketing Strategy of Xiaomi IndiaSoumyajeet Rout0% (1)
- Preliminary Design and Development of Small Class UAV For Testing of Different Payloads and SensorsДокумент6 страницPreliminary Design and Development of Small Class UAV For Testing of Different Payloads and SensorsAlg PRasadОценок пока нет
- Small Unmanned Aircraft: Theory and PracticeОт EverandSmall Unmanned Aircraft: Theory and PracticeРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Typhoon Transonic Pich UpДокумент31 страницаTyphoon Transonic Pich UpBjørnar Bolsøy100% (1)
- 2009 UAV Project DescriptionДокумент2 страницы2009 UAV Project Descriptionjohnyb111Оценок пока нет
- Rq4 Global HawkДокумент5 страницRq4 Global HawkTuğba BüyüktanırОценок пока нет
- Rafale DealДокумент48 страницRafale DealNaresh NandamОценок пока нет
- P197-199 UAS-Engines PVBДокумент3 страницыP197-199 UAS-Engines PVBredxusОценок пока нет
- Aerodynamic Sections: (An Introduction Based On NACA Airfoils)Документ16 страницAerodynamic Sections: (An Introduction Based On NACA Airfoils)jvila31Оценок пока нет
- Introduction To Aircraft IndustryДокумент94 страницыIntroduction To Aircraft IndustryKishor PatilОценок пока нет
- Pratt Whitney PurePower Engine For Airbus A320neo Soars On Wing Begins First Flight Test ProgramДокумент2 страницыPratt Whitney PurePower Engine For Airbus A320neo Soars On Wing Begins First Flight Test Programaurel_dantis8197100% (1)
- Preliminary Design of Supersonic FighterДокумент28 страницPreliminary Design of Supersonic FighterSarangОценок пока нет
- NW 44 - UAV Engine - Detailed Datasheet PDFДокумент2 страницыNW 44 - UAV Engine - Detailed Datasheet PDFmecambОценок пока нет
- Gal-Or Lectures On Stealth Jetonautics v. Aerodynamics, Strike Drones v. Fighter AircraftДокумент36 страницGal-Or Lectures On Stealth Jetonautics v. Aerodynamics, Strike Drones v. Fighter AircraftProf.-Dr. Benjamin Gal-OrОценок пока нет
- UAVs For Disaster ManagementДокумент14 страницUAVs For Disaster ManagementAviation/Space History Library100% (1)
- Micro Air Vehicles Seminar1Документ33 страницыMicro Air Vehicles Seminar1deepubs89Оценок пока нет
- UavДокумент11 страницUavAthul MuraliОценок пока нет
- Articles - Rafale DealДокумент153 страницыArticles - Rafale DealVijay KrishnaОценок пока нет
- Performance-Energy Excess PowerДокумент53 страницыPerformance-Energy Excess PowerÇalanyalıoğluОценок пока нет
- DRDO RedtingДокумент16 страницDRDO RedtingssinghОценок пока нет
- Combined Ducted Rocket and Solid Fuel Ramjet CycleДокумент8 страницCombined Ducted Rocket and Solid Fuel Ramjet CycleendoparasiteОценок пока нет
- Structural Dynamic Analysis in Rocket Propulsion and Launch VehiclesДокумент38 страницStructural Dynamic Analysis in Rocket Propulsion and Launch VehiclesendoparasiteОценок пока нет
- Lanz On 2014Документ12 страницLanz On 2014endoparasiteОценок пока нет
- Microgravity Restart of Liquid Rocket Engine With Low Propellant ResidualsДокумент26 страницMicrogravity Restart of Liquid Rocket Engine With Low Propellant ResidualsendoparasiteОценок пока нет
- Applsci 12 03356 v2Документ9 страницApplsci 12 03356 v2endoparasiteОценок пока нет
- My MainДокумент29 страницMy MainendoparasiteОценок пока нет
- Supersonic Combustion Models ApplicationДокумент26 страницSupersonic Combustion Models ApplicationendoparasiteОценок пока нет
- mueIEEE14 PDFДокумент8 страницmueIEEE14 PDFlalitha rОценок пока нет
- Simscape UgДокумент824 страницыSimscape Uggabo2008Оценок пока нет
- Moam - Info Simmechanics 5a322f221723dd6dcba0c75fДокумент40 страницMoam - Info Simmechanics 5a322f221723dd6dcba0c75fendoparasiteОценок пока нет
- Moam - Info Simmechanics 5a322f221723dd6dcba0c75fДокумент40 страницMoam - Info Simmechanics 5a322f221723dd6dcba0c75fendoparasiteОценок пока нет
- Multibody System Simulation With SimmechanicsДокумент24 страницыMultibody System Simulation With SimmechanicsSonny Jason AОценок пока нет
- Thermal Design of A Laptop Computer by A Personal ComputerДокумент6 страницThermal Design of A Laptop Computer by A Personal ComputerendoparasiteОценок пока нет
- 2008 LeePS Saturated Flow Boiling HT in MCHSДокумент18 страниц2008 LeePS Saturated Flow Boiling HT in MCHSendoparasiteОценок пока нет
- Thermal Design of A Ultra-Slim Notebook ComputerДокумент7 страницThermal Design of A Ultra-Slim Notebook ComputerendoparasiteОценок пока нет
- ExtrapolationДокумент13 страницExtrapolationendoparasite0% (1)
- Interpolation, Smoothing, Extrapolation: What Is A Good Estimate For y For X 4.5, or X 15 ?Документ22 страницыInterpolation, Smoothing, Extrapolation: What Is A Good Estimate For y For X 4.5, or X 15 ?Anita AndrianiОценок пока нет
- CFD Analysis of A Kerosene Fuel Tank To Reduce Liquid SloshingДокумент7 страницCFD Analysis of A Kerosene Fuel Tank To Reduce Liquid SloshingendoparasiteОценок пока нет
- Experimental Investigation On Heat Transfer of Finned TubeДокумент11 страницExperimental Investigation On Heat Transfer of Finned TubeendoparasiteОценок пока нет
- Shape Optimization of Micro-Channel Heat Sink For Micro-Electronic CoolingДокумент9 страницShape Optimization of Micro-Channel Heat Sink For Micro-Electronic CoolingendoparasiteОценок пока нет
- Ada 395503Документ51 страницаAda 395503endoparasiteОценок пока нет
- High-Performance Heat Sinking For VLSI PDFДокумент4 страницыHigh-Performance Heat Sinking For VLSI PDFendoparasiteОценок пока нет
- SBS Instalment Plans at 0% Markup : Alfalah Credit Cards Application FormДокумент2 страницыSBS Instalment Plans at 0% Markup : Alfalah Credit Cards Application FormendoparasiteОценок пока нет
- AMOM Lecture1 - FundamentalsДокумент50 страницAMOM Lecture1 - FundamentalsendoparasiteОценок пока нет
- Part5 PDFДокумент36 страницPart5 PDFendoparasiteОценок пока нет
- Solving Nonlinear Governing Equations of Motion Using Matlab and Simulink in First Dynamics CourseДокумент15 страницSolving Nonlinear Governing Equations of Motion Using Matlab and Simulink in First Dynamics CourseendoparasiteОценок пока нет
- Linearization of Non-Linear Ordinary Diff EquationДокумент4 страницыLinearization of Non-Linear Ordinary Diff EquationendoparasiteОценок пока нет
- Electrical Engineering Lab Vica AnДокумент6 страницElectrical Engineering Lab Vica Anabdulnaveed50% (2)
- 35 Electrical Safety SamanДокумент32 страницы35 Electrical Safety SamanSaman Sri Ananda RajapaksaОценок пока нет
- The Time Machine Was First Published in 1984 As A Story Under The Name The Time Traveller in The National ObserverДокумент1 страницаThe Time Machine Was First Published in 1984 As A Story Under The Name The Time Traveller in The National ObservermarceОценок пока нет
- Stucor Qp-Ec8095Документ16 страницStucor Qp-Ec8095JohnsondassОценок пока нет
- Crisis of The World Split Apart: Solzhenitsyn On The WestДокумент52 страницыCrisis of The World Split Apart: Solzhenitsyn On The WestdodnkaОценок пока нет
- 32 Hyderabad HITEC City BisleriДокумент23 страницы32 Hyderabad HITEC City BisleriSridhar ViswanathanОценок пока нет
- PGCRSM-01-BLOCK-03 Research Design ExperimentalДокумент29 страницPGCRSM-01-BLOCK-03 Research Design ExperimentalVijilan Parayil VijayanОценок пока нет
- Prognostic Factors and Management of Patients With Choanal AtresiaДокумент7 страницPrognostic Factors and Management of Patients With Choanal Atresiafarah maulida martaОценок пока нет
- Play ClawДокумент2 страницыPlay ClawFrenda SeivelunОценок пока нет
- Accounting Students' Perceptions On Employment OpportunitiesДокумент7 страницAccounting Students' Perceptions On Employment OpportunitiesAquila Kate ReyesОценок пока нет
- G1000 Us 1014 PDFДокумент820 страницG1000 Us 1014 PDFLuís Miguel RomãoОценок пока нет
- Bubble Test Direct Pressure InserviceДокумент3 страницыBubble Test Direct Pressure InserviceEdAlmОценок пока нет
- Nutrition 2022 PIRДокумент22 страницыNutrition 2022 PIRAlmira LacasaОценок пока нет
- ইসলাম ও আধুনিকতা – মুফতি মুহম্মদ তকী উসমানীДокумент118 страницইসলাম ও আধুনিকতা – মুফতি মুহম্মদ তকী উসমানীMd SallauddinОценок пока нет
- William Hallett - BiographyДокумент2 страницыWilliam Hallett - Biographyapi-215611511Оценок пока нет
- Possessive Determiners: A. 1. A) B) C) 2. A) B) C) 3. A) B) C) 4. A) B) C) 5. A) B) C) 6. A) B) C) 7. A) B) C)Документ1 страницаPossessive Determiners: A. 1. A) B) C) 2. A) B) C) 3. A) B) C) 4. A) B) C) 5. A) B) C) 6. A) B) C) 7. A) B) C)Manuela Marques100% (1)
- Strategic Marketing: The University of Lahore (Islamabad Campus)Документ3 страницыStrategic Marketing: The University of Lahore (Islamabad Campus)Sumaira IrshadОценок пока нет
- Test Bank For The Psychology of Health and Health Care A Canadian Perspective 5th EditionДокумент36 страницTest Bank For The Psychology of Health and Health Care A Canadian Perspective 5th Editionload.notablewp0oz100% (37)
- Albert Roussel, Paul LandormyДокумент18 страницAlbert Roussel, Paul Landormymmarriuss7Оценок пока нет
- All India Civil Services Coaching Centre, Chennai - 28Документ4 страницыAll India Civil Services Coaching Centre, Chennai - 28prakashОценок пока нет
- PreviewpdfДокумент29 страницPreviewpdfSoemarlan ErlanОценок пока нет