Вам также может понравиться
- Bases Del ConcursoДокумент1 страницаBases Del ConcursoRoberto GuaitaОценок пока нет
- Oferta de Trabajo Inspector A Mecanico A de Mantenimiento MinaДокумент1 страницаOferta de Trabajo Inspector A Mecanico A de Mantenimiento MinaRoberto GuaitaОценок пока нет
- BasesDelConcurso 131Документ2 страницыBasesDelConcurso 131magdalena sailemaОценок пока нет
- FACTURA 001002000115898 7100322053025.xml FACTURA 001002000115898 7100322053025 PDFДокумент1 страницаFACTURA 001002000115898 7100322053025.xml FACTURA 001002000115898 7100322053025 PDFRoberto GuaitaОценок пока нет
- Bases Del ConcursoДокумент2 страницыBases Del ConcursoRoberto GuaitaОценок пока нет
- MSP HCU Certificadovacunacion1723178719Документ1 страницаMSP HCU Certificadovacunacion1723178719Roberto GuaitaОценок пока нет
- Guaita Realismo MagicoДокумент3 страницыGuaita Realismo MagicoRoberto GuaitaОценок пока нет
- FICHAДокумент4 страницыFICHARoberto GuaitaОценок пока нет
- Bases Del ConcursoДокумент1 страницаBases Del ConcursoRoberto GuaitaОценок пока нет
- FPMCuentosfantsticoslatinoamericanos MUESTRADIGITALДокумент23 страницыFPMCuentosfantsticoslatinoamericanos MUESTRADIGITALConnie FigueroaОценок пока нет
- RelatoДокумент7 страницRelatoRoberto GuaitaОценок пока нет
- Hoja InfДокумент4 страницыHoja InfRoberto GuaitaОценок пока нет
- Bases Del ConcursoДокумент1 страницаBases Del ConcursoRoberto GuaitaОценок пока нет
- EXPO TIPOS DE NARRACIÓN - 8088 - Guaita RobertoДокумент22 страницыEXPO TIPOS DE NARRACIÓN - 8088 - Guaita RobertoRoberto GuaitaОценок пока нет
- TALLER #2 Eficacia y EficienciaДокумент1 страницаTALLER #2 Eficacia y EficienciaAnonymous KJcF9QIRОценок пока нет
- CONTRIBUCIÓNES AL CONCEPTO DE LA CALIDAD - Maestros de La Calidad y Sus AportesДокумент42 страницыCONTRIBUCIÓNES AL CONCEPTO DE LA CALIDAD - Maestros de La Calidad y Sus AportesDanielaОценок пока нет
- Guaita Taller 2Документ1 страницаGuaita Taller 2Roberto GuaitaОценок пока нет
- 1.6 - Conceptos BásicosДокумент24 страницы1.6 - Conceptos BásicosLalex MoretaОценок пока нет
- 1.8. - Dimenciones de La CalidadДокумент23 страницы1.8. - Dimenciones de La CalidadDanielaОценок пока нет
- Evolucion de La CalidadДокумент18 страницEvolucion de La CalidadAlex CañarОценок пока нет
- ParetoДокумент5 страницParetoRoberto GuaitaОценок пока нет
- Plan de CalidadДокумент3 страницыPlan de CalidadRoberto GuaitaОценок пока нет
- Análisis Del VideoДокумент1 страницаAnálisis Del VideoRoberto GuaitaОценок пока нет
- 1.7. - Requerimientos Del Cliente PDFДокумент6 страниц1.7. - Requerimientos Del Cliente PDFAlex CañarОценок пока нет
- 1.6 - Conceptos BásicosДокумент24 страницы1.6 - Conceptos BásicosDanielaОценок пока нет
- Narracion DescripcionДокумент27 страницNarracion DescripcionJaime AguiránОценок пока нет
- Hoja InfДокумент4 страницыHoja InfRoberto GuaitaОценок пока нет
- ParetoДокумент3 страницыParetoRoberto GuaitaОценок пока нет
- Sopa de Letras - 2Документ2 страницыSopa de Letras - 2Roberto GuaitaОценок пока нет
- Coca ColaДокумент12 страницCoca ColaJesus Alfonso EscoffieОценок пока нет
- Módulo de Distribución de Energía PDFДокумент30 страницMódulo de Distribución de Energía PDFKarina Calderon Carrizales100% (2)
- Leccion 1. Introduccion A La Teoria de Maquinas y MecanismosДокумент14 страницLeccion 1. Introduccion A La Teoria de Maquinas y MecanismosManuel Jimenez SerranoОценок пока нет
- HojasДокумент31 страницаHojasjesusОценок пока нет
- Manual de Mecanica de Automoviles (249 Pag)Документ252 страницыManual de Mecanica de Automoviles (249 Pag)guillermolgОценок пока нет
- Angulos de DireccionДокумент18 страницAngulos de Direccionesteban rameixОценок пока нет
- Aceros BohlerДокумент49 страницAceros BohlerOliviet Wilfredo Roca Cuyubamba67% (3)
- Mat 5toДокумент29 страницMat 5toPablo SanchezОценок пока нет
- Alineamiento de Maquinas - SKF PDFДокумент150 страницAlineamiento de Maquinas - SKF PDFMiguel Pereyra Oyarce100% (2)
- Rehabilitación y Automatización de Maquinaria Industrial ObsoletaДокумент90 страницRehabilitación y Automatización de Maquinaria Industrial ObsoletaIsrael AdautaОценок пока нет
- Informe Del Área de Chancado Primario 2013Документ36 страницInforme Del Área de Chancado Primario 2013Juan Manuel Araya RocoОценок пока нет
- TESIS MaquinariaДокумент69 страницTESIS MaquinariaSergio Tadeo VegaОценок пока нет
- Presentación Montacargas 2017Документ53 страницыPresentación Montacargas 2017red_rex666100% (1)
- SchorchДокумент52 страницыSchorchKaaОценок пока нет
- Moto Traill AДокумент13 страницMoto Traill AJuan Villota100% (1)
- Mando FinalДокумент3 страницыMando FinalEver SaavedraОценок пока нет
- Sección 14 - Juntas y ApoyosДокумент82 страницыSección 14 - Juntas y ApoyosHgeovanni RvОценок пока нет
- 90806tema 7.Документ20 страниц90806tema 7.Saioa Oteiza ElizondoОценок пока нет
- Licar BombasДокумент24 страницыLicar BombasalvaroОценок пока нет
- 1,5 - 3,5 Toneladas. Serie Platinum II Llantas Neumáticas - Modelos Impulsados Por Motor - Gasolina, Combustible Dual, Diesel.Документ16 страниц1,5 - 3,5 Toneladas. Serie Platinum II Llantas Neumáticas - Modelos Impulsados Por Motor - Gasolina, Combustible Dual, Diesel.Fher AraujoОценок пока нет
- HMK MG 330Документ20 страницHMK MG 330Edwin BeltranОценок пока нет
- FICHA TECNICA SERIE 500 Modelo 1828Документ2 страницыFICHA TECNICA SERIE 500 Modelo 1828PEDRO ALBERTO BLAS ACOSTAОценок пока нет
- FC PDFДокумент4 страницыFC PDFClaudio C NarvaezОценок пока нет
- Información de Servicio Camiones: Suplemento A Códigos de Avería EBS/ESP Gen3Документ36 страницInformación de Servicio Camiones: Suplemento A Códigos de Avería EBS/ESP Gen3David GuioОценок пока нет
- Palanca de Control de La Hoja (Inclinación Horizontal Doble)Документ12 страницPalanca de Control de La Hoja (Inclinación Horizontal Doble)Jerson Perez YepezОценок пока нет
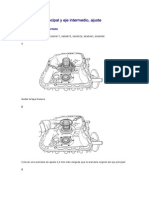
- 43185-5 Eje Principal y Eje Intermediario, AjusteДокумент6 страниц43185-5 Eje Principal y Eje Intermediario, AjusteRuben Acosta MuñozОценок пока нет
- 06 TRen de Potencia-1Документ13 страниц06 TRen de Potencia-1folkendanОценок пока нет
- Catálogo en Español AlfatestДокумент10 страницCatálogo en Español Alfatestingenieriaelectronic100% (2)
- Frenos Antibloqueo ABSДокумент46 страницFrenos Antibloqueo ABSRicardo Coutiño EscobarОценок пока нет
- Informe #1Документ36 страницInforme #1Diego arbelaezОценок пока нет
- Taller No 2. Diseño Pavimento Rigido AASHTO GRUPO 2Документ12 страницTaller No 2. Diseño Pavimento Rigido AASHTO GRUPO 2NICOLAS ANDRES HOLGUIN QUINTEROОценок пока нет