Вам также может понравиться
- A Semi-Implicit Mid-Point Rule For Stiff Systems of Ordinary Differential EquationsДокумент26 страницA Semi-Implicit Mid-Point Rule For Stiff Systems of Ordinary Differential EquationsKami JaraОценок пока нет
- Finite Difference Methods by LONG CHENДокумент7 страницFinite Difference Methods by LONG CHENSusana BarbosaОценок пока нет
- Convolution Quadrature and Discretized Operational Calculus. IДокумент17 страницConvolution Quadrature and Discretized Operational Calculus. Irezza ruzuqiОценок пока нет
- Lubich C (2) - RK Theory For Volterra Integrodifferential Equations (NumMat, 1982)Документ17 страницLubich C (2) - RK Theory For Volterra Integrodifferential Equations (NumMat, 1982)Александр ЛобаскинОценок пока нет
- Wiener SpaceДокумент22 страницыWiener SpaceforwardhoОценок пока нет
- FDM in MatlabДокумент6 страницFDM in Matlabzahid_rehman9574Оценок пока нет
- Crivelli The Stormer Verlet MethodДокумент14 страницCrivelli The Stormer Verlet Methodjjj_ddd_pierreОценок пока нет
- Extending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence DomainsДокумент20 страницExtending The Applicability of The SuperHalleyLike Method Using Continuous Derivatives and Restricted Convergence Domainstalvane.santos069Оценок пока нет
- Unit Finite Difference Methods: Structure Page NoДокумент36 страницUnit Finite Difference Methods: Structure Page NoTroy OwensОценок пока нет
- IJNAA - Volume 3 - Issue 1 - Pages 61-67Документ7 страницIJNAA - Volume 3 - Issue 1 - Pages 61-67Mohammad RoshaniОценок пока нет
- Táboas, P. (1990) - Periodic Solutions of A Planar Delay Equation.Документ17 страницTáboas, P. (1990) - Periodic Solutions of A Planar Delay Equation.Nolbert Yonel Morales TineoОценок пока нет
- Lecture 5-6: Separable Positive Definite Energetic Space Linear Dense Energetic Functional LemmaДокумент26 страницLecture 5-6: Separable Positive Definite Energetic Space Linear Dense Energetic Functional LemmaBittuОценок пока нет
- U.an Der Heiden, Periodic Solutions of A Nonlinear Second Order Differential Equation With DelayДокумент11 страницU.an Der Heiden, Periodic Solutions of A Nonlinear Second Order Differential Equation With DelayNolbert Yonel Morales TineoОценок пока нет
- Hankel MatricesДокумент36 страницHankel MatricesAashish PatidaarОценок пока нет
- Ma691 ch1Документ14 страницMa691 ch1Mohamed LatifiОценок пока нет
- Discontinuous GalerkinДокумент17 страницDiscontinuous GalerkinAnna ShcherbachevaОценок пока нет
- Chapter 3Документ25 страницChapter 3Rohit GadekarОценок пока нет
- Hilbert Transform CalculationДокумент18 страницHilbert Transform Calculationpulises2Оценок пока нет
- Chapter 5. Methods for Elliptic Equations: ρ ∂ + ⋅∇ = −∇ + + ∇ ∂ rrr r rДокумент10 страницChapter 5. Methods for Elliptic Equations: ρ ∂ + ⋅∇ = −∇ + + ∇ ∂ rrr r rteknikpembakaran2013Оценок пока нет
- Other ApplicationsДокумент78 страницOther Applications叶远虑Оценок пока нет
- Numerical Solution To Ordinary Differential EquationsДокумент11 страницNumerical Solution To Ordinary Differential EquationsLexzyrie Sybelle S. TolarbaОценок пока нет
- The Runge-Kutta MethodДокумент9 страницThe Runge-Kutta MethodSlavka JadlovskaОценок пока нет
- Metric Regularity and Subdifferential Calculus in Banach SpacesДокумент14 страницMetric Regularity and Subdifferential Calculus in Banach SpaceslucasОценок пока нет
- A New Approach For Solving Nonlinear Singular Boundary Value ProblemsДокумент11 страницA New Approach For Solving Nonlinear Singular Boundary Value ProblemsSyeda TehminaОценок пока нет
- Numerical Solution of ODEs-IVPДокумент32 страницыNumerical Solution of ODEs-IVPmitch_g_101Оценок пока нет
- Applied Partial Differential Equations - J. David Logan-1998Документ2 страницыApplied Partial Differential Equations - J. David Logan-1998Jeremy Mac LeanОценок пока нет
- Taylor Series 1Документ39 страницTaylor Series 1umarОценок пока нет
- Differential Calculus: Pierre SchapiraДокумент60 страницDifferential Calculus: Pierre SchapiraMatthew HullОценок пока нет
- Keywords: linear elliptic operators, Γ-convergence, H-convergence. 2000 Mathematics Subject Classification: 35J15, 35J20, 49J45Документ9 страницKeywords: linear elliptic operators, Γ-convergence, H-convergence. 2000 Mathematics Subject Classification: 35J15, 35J20, 49J45aityahiamassyliaОценок пока нет
- Stable Probability Distributions and Their Domains of Attraction: ApproachДокумент20 страницStable Probability Distributions and Their Domains of Attraction: ApproachDibbendu RoyОценок пока нет
- Lecture 7Документ14 страницLecture 7Mohamad AbbasОценок пока нет
- Phase Plane AnalysisДокумент10 страницPhase Plane AnalysisildmgzalОценок пока нет
- Ordinary Differential EquationДокумент15 страницOrdinary Differential EquationAli Asad SahuОценок пока нет
- Equations of Electromagnetism in Some Special Anisotropic SpacesДокумент15 страницEquations of Electromagnetism in Some Special Anisotropic SpacesevilmonsterbeastОценок пока нет
- Notes D If Jedna CineДокумент71 страницаNotes D If Jedna CinelisoviciОценок пока нет
- A Center-Stable Manifold Theorem For Differential Equations in Banach SpacesДокумент20 страницA Center-Stable Manifold Theorem For Differential Equations in Banach Spacessofia charry tobarОценок пока нет
- 443 Bit BoundaryДокумент5 страниц443 Bit BoundarySaint-CyrОценок пока нет
- Linear SystemsДокумент44 страницыLinear SystemsrajuvadlakondaОценок пока нет
- An Adaptive Finite Element Discretisation For A Simplified Signorini ProblemДокумент13 страницAn Adaptive Finite Element Discretisation For A Simplified Signorini ProblemFelipe IgnazioОценок пока нет
- Volterra Integral Equations in Banach SpaceДокумент49 страницVolterra Integral Equations in Banach SpaceSgk ManikandanОценок пока нет
- NumericalMethods UofVДокумент182 страницыNumericalMethods UofVsaladsamurai100% (1)
- Persamaan GelombangДокумент7 страницPersamaan GelombangHikmah InsyirahОценок пока нет
- jiang1998Lдругое исчислениеДокумент5 страницjiang1998Lдругое исчислениеDouble SchneiderОценок пока нет
- Shrodinger EqДокумент22 страницыShrodinger Eqawais33306Оценок пока нет
- Ladd 2003Документ45 страницLadd 2003AsrafulОценок пока нет
- Adomian Convergent Series Solution of Nonlinear EquationДокумент6 страницAdomian Convergent Series Solution of Nonlinear EquationalpinslutОценок пока нет
- Partial Differential EquationsДокумент18 страницPartial Differential EquationsJuanParedesCasasОценок пока нет
- A Nystrom Method For A Class of FredholmДокумент20 страницA Nystrom Method For A Class of FredholmAydinel HakanОценок пока нет
- M. Badiale: J - Au /u/ U + F (U) in Q / U (X) 0, Ue HÌ (Q)Документ12 страницM. Badiale: J - Au /u/ U + F (U) in Q / U (X) 0, Ue HÌ (Q)Clayton RibeiroОценок пока нет
- Orthogonal Wavelets With Compact Support On Locally Compact Abelian GroupsДокумент28 страницOrthogonal Wavelets With Compact Support On Locally Compact Abelian GroupsukoszapavlinjeОценок пока нет
- Use of Fast Fourier Transforms For Solving Partial Differential Equations in PhysicsДокумент26 страницUse of Fast Fourier Transforms For Solving Partial Differential Equations in PhysicsEduardo SandovalОценок пока нет
- A New Technique of Initial Boundary Value Problems Using Adomian Decomposition MethodДокумент16 страницA New Technique of Initial Boundary Value Problems Using Adomian Decomposition MethodKanthavel ThillaiОценок пока нет
- 1.5. Linear ODEs. Bernoulli Equation. Population DynamicsДокумент11 страниц1.5. Linear ODEs. Bernoulli Equation. Population DynamicsMuhammad Ridho RamadhanОценок пока нет
- Chapter 13Документ55 страницChapter 13Ahsanul Amin ShantoОценок пока нет
- Vibrations of StructuresДокумент9 страницVibrations of StructuresRafaAlmeidaОценок пока нет
- Variational and Weighted Residual MethodsДокумент26 страницVariational and Weighted Residual Methodsdarebusi1Оценок пока нет
- SISSA, Via Beirut 2-4, Trieste 34014, Italy: Discrete and Continuous Dynamical Systems Volume 9, Number 1, January 2003Документ14 страницSISSA, Via Beirut 2-4, Trieste 34014, Italy: Discrete and Continuous Dynamical Systems Volume 9, Number 1, January 2003José MarcosОценок пока нет
- Numerical DifferentiationДокумент3 страницыNumerical DifferentiationGustavo LibotteОценок пока нет
- E7 BB4447 D 01Документ21 страницаE7 BB4447 D 01Dell RugОценок пока нет
- Satyajit RayДокумент13 страницSatyajit RaySudipОценок пока нет
- EncyclopediaДокумент12 страницEncyclopediaSudipОценок пока нет
- Mahasweta DeviДокумент5 страницMahasweta DeviSudipОценок пока нет
- Advanced Engineering Mathematics Prof. Pratima Panigrahi Department of Mathematics Indian Institute of Technology, KharagpurДокумент15 страницAdvanced Engineering Mathematics Prof. Pratima Panigrahi Department of Mathematics Indian Institute of Technology, KharagpurSudipОценок пока нет
- Hiralal ShastriДокумент2 страницыHiralal ShastriSudipОценок пока нет
- Femtoc PDFДокумент3 страницыFemtoc PDFSudipОценок пока нет
- D011562229 PDFДокумент8 страницD011562229 PDFSudipОценок пока нет
- Advanced Engineering Informatics: EditorsДокумент1 страницаAdvanced Engineering Informatics: EditorsSudipОценок пока нет
- Boundary Value Problems in One DimensionДокумент63 страницыBoundary Value Problems in One DimensionSudipОценок пока нет
- Contents Continued From Outside Back CoverДокумент1 страницаContents Continued From Outside Back CoverSudipОценок пока нет
- Wjtklagklajr IjeliawgtiiДокумент1 страницаWjtklagklajr IjeliawgtiiSudipОценок пока нет
- Advanced Engineering Informatics: Sciverse SciencedirectДокумент2 страницыAdvanced Engineering Informatics: Sciverse SciencedirectSudipОценок пока нет
- Advanced Engineering Informatics: EditorsДокумент1 страницаAdvanced Engineering Informatics: EditorsSudipОценок пока нет
- Advanced Engineering Informatics: Co-Editors-in-ChiefДокумент1 страницаAdvanced Engineering Informatics: Co-Editors-in-ChiefSudipОценок пока нет
- 1 s2.0 S2212671614000687 MainДокумент1 страница1 s2.0 S2212671614000687 MainSudipОценок пока нет
- Biomaterialia: Amsterdam - Boston - London - New York - Oxford - Paris - Philadelphia - San Diego - ST LouisДокумент1 страницаBiomaterialia: Amsterdam - Boston - London - New York - Oxford - Paris - Philadelphia - San Diego - ST LouisSudipОценок пока нет
- 2a Unani Medicine in India - An OverviewДокумент123 страницы2a Unani Medicine in India - An OverviewGautam NatrajanОценок пока нет
- Packet Unit 3 - Atomic Structure-Answers ChemistryДокумент11 страницPacket Unit 3 - Atomic Structure-Answers ChemistryMario J. KafatiОценок пока нет
- CEN and CENELEC Position Paper On The Proposal For CPR RevisionДокумент15 страницCEN and CENELEC Position Paper On The Proposal For CPR Revisionhalexing5957Оценок пока нет
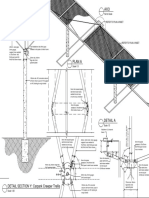
- TrellisДокумент1 страницаTrellisCayenne LightenОценок пока нет
- Elastomeric Impression MaterialsДокумент6 страницElastomeric Impression MaterialsMarlene CasayuranОценок пока нет
- Vedic Maths Edited 2Документ9 страницVedic Maths Edited 2sriram AОценок пока нет
- III.A.1. University of Hawaii at Manoa Cancer Center Report and Business PlanДокумент35 страницIII.A.1. University of Hawaii at Manoa Cancer Center Report and Business Planurindo mars29Оценок пока нет
- Christena Nippert-Eng - Watching Closely - A Guide To Ethnographic Observation-Oxford University Press (2015)Документ293 страницыChristena Nippert-Eng - Watching Closely - A Guide To Ethnographic Observation-Oxford University Press (2015)Emiliano CalabazaОценок пока нет
- Participant Observation: Qualitative Research Methods: A Data Collector's Field GuideДокумент17 страницParticipant Observation: Qualitative Research Methods: A Data Collector's Field GuideMarta CabreraОценок пока нет
- Standard nfx15-211Документ2 страницыStandard nfx15-211Luis Enrique Cóndor PorrasОценок пока нет
- Five Kingdom ClassificationДокумент6 страницFive Kingdom ClassificationRonnith NandyОценок пока нет
- Broiler ProductionДокумент13 страницBroiler ProductionAlexa Khrystal Eve Gorgod100% (1)
- Settlement Report - 14feb17Документ10 страницSettlement Report - 14feb17Abdul SalamОценок пока нет
- 10 Essential Books For Active TradersДокумент6 страниц10 Essential Books For Active TradersChrisTheodorou100% (2)
- Invoices For UEG IstanbulДокумент7 страницInvoices For UEG IstanbulIesaw IesawОценок пока нет
- IG Deck Seal PumpДокумент3 страницыIG Deck Seal PumpSergei KurpishОценок пока нет
- Internet Bill FormatДокумент1 страницаInternet Bill FormatGopal Singh100% (1)
- Asuhan Keperawatan Pada Klien Dengan Proses Penyembuhan Luka. Pengkajian Diagnosa Perencanaan Implementasi EvaluasiДокумент43 страницыAsuhan Keperawatan Pada Klien Dengan Proses Penyembuhan Luka. Pengkajian Diagnosa Perencanaan Implementasi EvaluasiCak FirmanОценок пока нет
- Linear Dynamic Analysis of Free-Piston Stirling Engines OnДокумент21 страницаLinear Dynamic Analysis of Free-Piston Stirling Engines OnCh Sameer AhmedОценок пока нет
- How Can Literary Spaces Support Neurodivergent Readers and WritersДокумент2 страницыHow Can Literary Spaces Support Neurodivergent Readers and WritersRenato Jr Bernadas Nasilo-anОценок пока нет
- Tetra IntroductionДокумент65 страницTetra Introductionuniversidaddistrital100% (2)
- Bachelors - Harvest Moon Animal ParadeДокумент12 страницBachelors - Harvest Moon Animal ParaderikaОценок пока нет
- Bajaj CNSДокумент3 страницыBajaj CNSAbhijit PaikarayОценок пока нет
- Restaurant Report Card: February 9, 2023Документ4 страницыRestaurant Report Card: February 9, 2023KBTXОценок пока нет
- Geometry and IntuitionДокумент9 страницGeometry and IntuitionHollyОценок пока нет
- Principles of Business Grade 10 June 2021 Time: 1 1/2 Hrs. Paper 2 Answer ONLY 1 Question in Section I. Section IДокумент3 страницыPrinciples of Business Grade 10 June 2021 Time: 1 1/2 Hrs. Paper 2 Answer ONLY 1 Question in Section I. Section Iapi-556426590Оценок пока нет
- Presentation Municipal Appraisal CommitteeДокумент3 страницыPresentation Municipal Appraisal CommitteeEdwin JavateОценок пока нет
- PCI Bridge ManualДокумент34 страницыPCI Bridge ManualEm MarОценок пока нет
- Formal Letter LPДокумент2 страницыFormal Letter LPLow Eng Han100% (1)
- Sample Cross-Complaint For Indemnity For CaliforniaДокумент4 страницыSample Cross-Complaint For Indemnity For CaliforniaStan Burman75% (8)