Вам также может понравиться
- 2010 ODA Audit Report PDFДокумент307 страниц2010 ODA Audit Report PDFKennОценок пока нет
- Sustainability 11 03750Документ20 страницSustainability 11 03750silminaОценок пока нет
- BLGF Metadata of Local Government FinanceДокумент11 страницBLGF Metadata of Local Government FinanceKennОценок пока нет
- 2010 ODA Audit Report PDFДокумент307 страниц2010 ODA Audit Report PDFKennОценок пока нет
- ESS3 Ethiopian Rural Socioeconomic SurveyДокумент48 страницESS3 Ethiopian Rural Socioeconomic SurveyKennОценок пока нет
- Philippine Export by Commodity Group 2010-2009Документ2 страницыPhilippine Export by Commodity Group 2010-2009KennОценок пока нет
- ESS3 Ethiopian Rural Socioeconomic SurveyДокумент22 страницыESS3 Ethiopian Rural Socioeconomic SurveyKennОценок пока нет
- National Panel Survey TanzaniaДокумент35 страницNational Panel Survey TanzaniaKennОценок пока нет
- Collapse Package RДокумент1 страницаCollapse Package RKennОценок пока нет
- Math CG - With Tagged Math Equipment 1 PDFДокумент257 страницMath CG - With Tagged Math Equipment 1 PDFsweetienedsОценок пока нет
- Nigeria Agriculture Questionnaire GPSДокумент50 страницNigeria Agriculture Questionnaire GPSKennОценок пока нет
- Cancellation of Mining in Philippines 2005Документ9 страницCancellation of Mining in Philippines 2005KennОценок пока нет
- ACS ChoosingID PDFДокумент112 страницACS ChoosingID PDFKennОценок пока нет
- USGS Mineral Yearbook 2003Документ1 страницаUSGS Mineral Yearbook 2003KennОценок пока нет
- USGS Minerals Yearbook 2004, Philippines Mineral ProductionДокумент3 страницыUSGS Minerals Yearbook 2004, Philippines Mineral ProductionKennОценок пока нет
- Farm To Market Roads PDFДокумент139 страницFarm To Market Roads PDFKennОценок пока нет
- English CG!Документ247 страницEnglish CG!Ronah Vera B. TobiasОценок пока нет
- National Roads 1982 - PhilippinesДокумент4 страницыNational Roads 1982 - PhilippinesKennОценок пока нет
- USGS Minerals Yearbook 2005, Volume III – Philippines Mineral Production Statistics and AnalysisДокумент3 страницыUSGS Minerals Yearbook 2005, Volume III – Philippines Mineral Production Statistics and AnalysisKennОценок пока нет
- Mgbform6 1Документ3 страницыMgbform6 1KennОценок пока нет
- Farm To Market Roads PDFДокумент139 страницFarm To Market Roads PDFKennОценок пока нет
- Ph1995ei Philippines Enumerator InstructionsДокумент173 страницыPh1995ei Philippines Enumerator InstructionsKennОценок пока нет
- Position Description FormДокумент2 страницыPosition Description FormKennОценок пока нет
- UCD GEARY INSTITUTE DISCUSSION PAPER: EVIDENCE FROM RANDOMIZED EXPERIMENT OF HOME VISITING IMPACT ON CHILD SKILLSДокумент90 страницUCD GEARY INSTITUTE DISCUSSION PAPER: EVIDENCE FROM RANDOMIZED EXPERIMENT OF HOME VISITING IMPACT ON CHILD SKILLSKennОценок пока нет
- Dynamic Public FinanceДокумент73 страницыDynamic Public FinanceKennОценок пока нет
- PH Labor Market WB PDFДокумент115 страницPH Labor Market WB PDFKennОценок пока нет
- Philippines Position Description FormДокумент3 страницыPhilippines Position Description FormJhondriel LimОценок пока нет
- UNDP 2011 Financial Report and Auditor's FindingsДокумент284 страницыUNDP 2011 Financial Report and Auditor's FindingsKennОценок пока нет
- Increasing Frequency of HeatwavesДокумент5 страницIncreasing Frequency of HeatwavesKennОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Module02 ClassNotesДокумент43 страницыModule02 ClassNotesGeay PeterОценок пока нет
- Signal Processing For Intelligent Sensor Systems With MATLAB 2nd Edition PDFДокумент664 страницыSignal Processing For Intelligent Sensor Systems With MATLAB 2nd Edition PDFwijdijwij100% (1)
- Fhsstphy PDFДокумент397 страницFhsstphy PDFSuresh RajagopalОценок пока нет
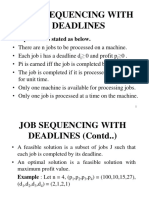
- Job Sequencing With The DeadlineДокумент5 страницJob Sequencing With The DeadlineAbhiОценок пока нет
- Project Management For Construction - Organization and Use of Project InformationДокумент16 страницProject Management For Construction - Organization and Use of Project InformationFarid MorganОценок пока нет
- Icse 10 Computer Chinni TR NoteДокумент8 страницIcse 10 Computer Chinni TR NoteAD SOLUTIONSОценок пока нет
- GATE 2012 Exam Syllabus, GATE 2012 Syllabus, Syllabus For GATE 2012, Syllabus Mtech GATE 2012, GATE Syllabus 2012, GATE 2011 SyllabusДокумент2 страницыGATE 2012 Exam Syllabus, GATE 2012 Syllabus, Syllabus For GATE 2012, Syllabus Mtech GATE 2012, GATE Syllabus 2012, GATE 2011 SyllabusKhadar ValiОценок пока нет
- Infinitesimal Strain Theory - WikipediaДокумент18 страницInfinitesimal Strain Theory - Wikipediaismail adeizaОценок пока нет
- Mission:: Program Development Life Cycle (PDLC) Problem Solving Concepts (Part 2)Документ3 страницыMission:: Program Development Life Cycle (PDLC) Problem Solving Concepts (Part 2)NARVENESH A L GEVARATNAMОценок пока нет
- Modeling and Simulation of CO2 Absorption Into ProДокумент15 страницModeling and Simulation of CO2 Absorption Into Profarah al-sudaniОценок пока нет
- Overexcitation Limiter Modeling For Power System SДокумент5 страницOverexcitation Limiter Modeling For Power System SÁlvaro ChávezОценок пока нет
- Must-Do Algorithms For Coding Rounds: Why Trust This Sheet ?Документ3 страницыMust-Do Algorithms For Coding Rounds: Why Trust This Sheet ?cscsОценок пока нет
- End Mill Attributes Terminology PDFДокумент2 страницыEnd Mill Attributes Terminology PDFDejan JovanovicОценок пока нет
- Finroc Crash CourseДокумент21 страницаFinroc Crash CourseLuis GonzalesОценок пока нет
- All Excell FunctionsДокумент3 страницыAll Excell Functionsrajesh_jeyachandranОценок пока нет
- Row-Echelon Form and ApplicationsДокумент1 страницаRow-Echelon Form and ApplicationsSanjoy BrahmaОценок пока нет
- Algebra 1 Honors | Inequalities and Intervals: Finding Solutions to Inequalities and Interval NotationДокумент3 страницыAlgebra 1 Honors | Inequalities and Intervals: Finding Solutions to Inequalities and Interval NotationJoh TayagОценок пока нет
- Podar International School (Icse) Practice Sheet STD: X Chapter: 4 Linear Inequations Subject: MathematicsДокумент2 страницыPodar International School (Icse) Practice Sheet STD: X Chapter: 4 Linear Inequations Subject: Mathematicspravingosavi1011_578Оценок пока нет
- CI45 Eng ManualДокумент60 страницCI45 Eng Manualmiklitsa0% (1)
- Tutorials2016s1 Week9 AnswersДокумент4 страницыTutorials2016s1 Week9 AnswersyizzyОценок пока нет
- Hotel MGMT Soft Case StudyДокумент11 страницHotel MGMT Soft Case StudyPratik BhandirgeОценок пока нет
- Forced Convection Lab Report PDFДокумент6 страницForced Convection Lab Report PDFAshtiGosineОценок пока нет
- 2003 Prentice Hall, Inc. All Rights ReservedДокумент50 страниц2003 Prentice Hall, Inc. All Rights Reservedkona15Оценок пока нет
- The lavaan tutorial: an introduction to the basic componentsДокумент38 страницThe lavaan tutorial: an introduction to the basic componentsloebevansОценок пока нет
- W10D1: Inductance and Magnetic Field EnergyДокумент48 страницW10D1: Inductance and Magnetic Field EnergydharanikaОценок пока нет
- Science Engineering: VerifiedДокумент8 страницScience Engineering: VerifiedMuhammad AwaisОценок пока нет
- Factors Affecting QWL Full Paper by DR S C Das BHU India 2013Документ15 страницFactors Affecting QWL Full Paper by DR S C Das BHU India 2013pooja manghnaniОценок пока нет
- Example 2Документ7 страницExample 2Thái TranОценок пока нет
- B.E. Computer Science & Engineering/ B.E. Information Science & EngineeringДокумент2 страницыB.E. Computer Science & Engineering/ B.E. Information Science & EngineeringSafura AliyaОценок пока нет
- QM Problem Set 1Документ9 страницQM Problem Set 1Aniruddha GhoshОценок пока нет