Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Samsung Sr-608ev, Sr648ev, Sr688ev PDFДокумент64 страницыSamsung Sr-608ev, Sr648ev, Sr688ev PDFOlta Qarri100% (1)
- T00059 TroubleshootingДокумент26 страницT00059 TroubleshootingmahdilabedОценок пока нет
- T00054 Relay Workshop PDFДокумент3 страницыT00054 Relay Workshop PDFmahdilabedОценок пока нет
- Deterctor de FuegoДокумент4 страницыDeterctor de FuegodanilolabreОценок пока нет
- T 1 KmodbusДокумент32 страницыT 1 KmodbusmahdilabedОценок пока нет
- PLC HistoryДокумент10 страницPLC HistoryBhaskar GRОценок пока нет
- CanДокумент1 страницаCanmahdilabedОценок пока нет
- Connection Between WinCC and S7 Cpu Via Industrial EthernetДокумент28 страницConnection Between WinCC and S7 Cpu Via Industrial EthernetIslam NasserОценок пока нет
- WinCC Flexible RoutingДокумент1 страницаWinCC Flexible RoutingabirajeshОценок пока нет
- WinCC Flexible RoutingДокумент1 страницаWinCC Flexible RoutingabirajeshОценок пока нет
- Digital Process Controllers and PID SettingsДокумент5 страницDigital Process Controllers and PID SettingsmahdilabedОценок пока нет
- Numerical and Experimental Thermal Analysis of A Tunnel Kiln Used in Ceramic ProductionДокумент8 страницNumerical and Experimental Thermal Analysis of A Tunnel Kiln Used in Ceramic ProductionmahdilabedОценок пока нет
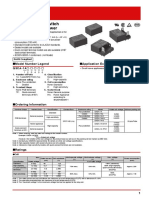
- Electronic Motor Protection Relays - G - EMPR-DMPRДокумент44 страницыElectronic Motor Protection Relays - G - EMPR-DMPRTruong HungОценок пока нет
- G5ca 1a RelayДокумент4 страницыG5ca 1a Relaysdancer75Оценок пока нет
- Sd119 ManualДокумент2 страницыSd119 ManualVictor PatsiОценок пока нет
- Trench Cpr04Документ12 страницTrench Cpr04Opscenar_PandoraОценок пока нет
- Module 1 Medium Voltage Switchgear AssembliesДокумент46 страницModule 1 Medium Voltage Switchgear Assembliesabhijit_wceОценок пока нет
- Electrical Technical SpecificationДокумент37 страницElectrical Technical SpecificationKamal KhanОценок пока нет
- Features:: Modules and Devices Are Powered Wiring DiagramДокумент3 страницыFeatures:: Modules and Devices Are Powered Wiring DiagramMatt StubblefieldОценок пока нет
- History Spring08 PDFДокумент7 страницHistory Spring08 PDFSpidermanОценок пока нет
- Nischita PaudelДокумент35 страницNischita PaudelNissita PdlОценок пока нет
- Model: K3063i: Specialize in Electric Power TestingДокумент3 страницыModel: K3063i: Specialize in Electric Power Testingrey chicoОценок пока нет
- Low-Holding Current Solenoid Operated Directional Control Valves DG4VL-3Документ6 страницLow-Holding Current Solenoid Operated Directional Control Valves DG4VL-3Rolando Jara YoungОценок пока нет
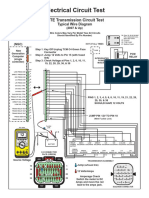
- 62te Quick TestДокумент1 страница62te Quick TestaОценок пока нет
- Zelio Logic 2 Smart Relay User ManualДокумент192 страницыZelio Logic 2 Smart Relay User ManualLambert G. RequinaОценок пока нет
- Contactor Control Motor Feeder Application GuideДокумент14 страницContactor Control Motor Feeder Application GuideRavishankar.AzadОценок пока нет
- M20 Datasheet 01-5959-01r0 ENДокумент8 страницM20 Datasheet 01-5959-01r0 ENTudorache IulianОценок пока нет
- Woodward - Peak 150 Digital Control For Steam TurbinesДокумент4 страницыWoodward - Peak 150 Digital Control For Steam TurbinesLuis Meneses QuintoОценок пока нет
- Question & AnswersДокумент31 страницаQuestion & AnswersAdisu ZinabuОценок пока нет
- DS 34-705-API 670 Machinery Protection SystemsДокумент6 страницDS 34-705-API 670 Machinery Protection SystemsandhucaosОценок пока нет
- LS ACB Production Specification - E FrameДокумент8 страницLS ACB Production Specification - E Framemas zak danielОценок пока нет
- User Manual: HMC4000 Marine Genset ControllerДокумент50 страницUser Manual: HMC4000 Marine Genset ControllerVinhОценок пока нет
- Weg ContactorsДокумент48 страницWeg ContactorsCristiano SoderОценок пока нет
- What Is Differential Protection Relay - Description & Its Types On The Basis of Principle of Operation - Circuit GlobeДокумент11 страницWhat Is Differential Protection Relay - Description & Its Types On The Basis of Principle of Operation - Circuit Globemarkigldmm918Оценок пока нет
- 5 Alarms and Fault FindingДокумент20 страниц5 Alarms and Fault Findingcengiz kutukcuОценок пока нет
- Eplc9600 Pid Quadro Man Eng v00Документ48 страницEplc9600 Pid Quadro Man Eng v00bertan dağıstanlıОценок пока нет
- 7SG14 - Duobias M Complete Technical Manual PDFДокумент142 страницы7SG14 - Duobias M Complete Technical Manual PDFsteve_osullivanОценок пока нет
- RCS-978E Transformer Protection Instruction Manual (EN - YJBH1002.0091.1101)Документ210 страницRCS-978E Transformer Protection Instruction Manual (EN - YJBH1002.0091.1101)SrinivasanОценок пока нет
- Zelio Logic SR3XT141FUДокумент2 страницыZelio Logic SR3XT141FUJocelioОценок пока нет
- Abb Price List PDFДокумент128 страницAbb Price List PDFWalter MenesesОценок пока нет
- P and Be Relay ManualДокумент70 страницP and Be Relay ManualVijay RaghavanОценок пока нет