Вам также может понравиться
- Introduction to Satellite Remote Sensing: Atmosphere, Ocean, Land and Cryosphere ApplicationsОт EverandIntroduction to Satellite Remote Sensing: Atmosphere, Ocean, Land and Cryosphere ApplicationsОценок пока нет
- Sergio Petrera - Ultra High Energy Cosmic Rays From Earth-Based ObservatoriesДокумент11 страницSergio Petrera - Ultra High Energy Cosmic Rays From Earth-Based ObservatoriesKdmdsОценок пока нет
- Archaeological Applications of Multi HypДокумент14 страницArchaeological Applications of Multi HypMyst MystyОценок пока нет
- A Machine Learning Approach For Correcting Radial Velocities Using Physical Observablesastronomy and AstrophysicsДокумент16 страницA Machine Learning Approach For Correcting Radial Velocities Using Physical Observablesastronomy and AstrophysicsluisОценок пока нет
- Molecfit:: A General Tool For Telluric Absorption CorrectionДокумент17 страницMolecfit:: A General Tool For Telluric Absorption Correctionr_jerez_fisОценок пока нет
- Numerical Methods For The Detection of Whirlwind (Cyclone, Tornado, Hurricane) On Satellite DataДокумент8 страницNumerical Methods For The Detection of Whirlwind (Cyclone, Tornado, Hurricane) On Satellite DataKurniawan BudiОценок пока нет
- 2002 Clark Surface Reflectance CalibrationДокумент21 страница2002 Clark Surface Reflectance CalibrationAmarjargal DavaadorjОценок пока нет
- Remote SensingДокумент72 страницыRemote Sensingస్వీటీ శ్రీ0% (1)
- Punyatoya Patra AMДокумент15 страницPunyatoya Patra AMsrinuvasОценок пока нет
- Automatic Spectral Classification of Stellar Spectra With Low Signal-To-Noise Ratio Using Artificial Neural NetworksДокумент14 страницAutomatic Spectral Classification of Stellar Spectra With Low Signal-To-Noise Ratio Using Artificial Neural NetworksGabuhОценок пока нет
- Remote Sensing and GIS HoDДокумент33 страницыRemote Sensing and GIS HoDArshdeep SinghОценок пока нет
- Seminar Report On Remote SensingДокумент28 страницSeminar Report On Remote Sensingakki1119044% (9)
- Ijettcs 2015 02 25 109Документ5 страницIjettcs 2015 02 25 109International Journal of Application or Innovation in Engineering & ManagementОценок пока нет
- Biospeckle: Fractional Fourier Transform Point of ViewДокумент6 страницBiospeckle: Fractional Fourier Transform Point of ViewJuan M. Vilardy O.Оценок пока нет
- Image Fusion Techniques For Remote Sensing ApplicationsДокумент13 страницImage Fusion Techniques For Remote Sensing ApplicationsakhilchibberОценок пока нет
- Remote Sensing Gis GPS PDFДокумент36 страницRemote Sensing Gis GPS PDFRahul SharmaОценок пока нет
- Thorsten Ritz, Salih Adem, Klaus Schulten - A Model For Photoreceptor-Based Magnetoreception in Birds PDFДокумент12 страницThorsten Ritz, Salih Adem, Klaus Schulten - A Model For Photoreceptor-Based Magnetoreception in Birds PDFwise monkeyОценок пока нет
- Interferometry: Interferometry Refers To A Family of Techniques in WhichДокумент9 страницInterferometry: Interferometry Refers To A Family of Techniques in Whichsushil4056Оценок пока нет
- Assignment 1Документ7 страницAssignment 1Santosh VermaОценок пока нет
- REMOTE SENSING and GIS Short InformationДокумент3 страницыREMOTE SENSING and GIS Short InformationsandeepvalunjОценок пока нет
- Satelite InsarДокумент19 страницSatelite InsarMaría Emilia TorresОценок пока нет
- S. B. Mende Et Al., 2000Документ28 страницS. B. Mende Et Al., 2000Neil BiswasОценок пока нет
- Theoretical Spectra and Atmospheres of Extrasolar Giant PlanetsДокумент83 страницыTheoretical Spectra and Atmospheres of Extrasolar Giant PlanetsclaudduОценок пока нет
- Remote SensingДокумент49 страницRemote SensingSachin ShrivastavОценок пока нет
- Observational AstronomyДокумент5 страницObservational AstronomyVeronica GușanОценок пока нет
- Remote Sensing DataДокумент51 страницаRemote Sensing DataAyoub EzubeikОценок пока нет
- 01 Rs EnvironmentДокумент47 страниц01 Rs EnvironmentSritama KunduОценок пока нет
- RS and GIS - Lecture NotesДокумент99 страницRS and GIS - Lecture Notesmadhu.ammu112Оценок пока нет
- Long-Range Polarimetric Imaging Through FogДокумент15 страницLong-Range Polarimetric Imaging Through FogKronjonОценок пока нет
- II. Literature Review: Digital Numbers (DN) Based On Their Inherent Spectral Reflectance and EmittanceДокумент11 страницII. Literature Review: Digital Numbers (DN) Based On Their Inherent Spectral Reflectance and EmittanceMade AnombawaОценок пока нет
- Amt 8 633 2015Документ15 страницAmt 8 633 2015abhishek ranjanОценок пока нет
- Adaptive OpticsДокумент26 страницAdaptive OpticsPrasanth NaikОценок пока нет
- Estimation of Tilted Solar Irradiation Using Artificial Neural NetworksДокумент10 страницEstimation of Tilted Solar Irradiation Using Artificial Neural NetworksAnas ElshabliОценок пока нет
- Spatially Resolved Spectroscopy of Z Canis Majoris ComponentsДокумент5 страницSpatially Resolved Spectroscopy of Z Canis Majoris ComponentsMy NameОценок пока нет
- Basic Principles of Remote SensingДокумент31 страницаBasic Principles of Remote SensingDosunmu LateefahОценок пока нет
- Answers To Review Questions For Chapter 1Документ21 страницаAnswers To Review Questions For Chapter 1Arham Sheikh0% (1)
- 19bgi35s U3Документ9 страниц19bgi35s U3M. ReenaОценок пока нет
- Basic's of Remote SensingДокумент31 страницаBasic's of Remote Sensingswapnil.awaghadeОценок пока нет
- JGR Solid Earth - 2018 - Anantrasirichai - Application of Machine Learning To Classification of Volcanic Deformation inДокумент15 страницJGR Solid Earth - 2018 - Anantrasirichai - Application of Machine Learning To Classification of Volcanic Deformation insen duОценок пока нет
- Radio Telescopes of Large Resolving Power: Artin YLEДокумент17 страницRadio Telescopes of Large Resolving Power: Artin YLEpirotteОценок пока нет
- Unit 1Документ42 страницыUnit 1manojmuthyalaОценок пока нет
- Remote Sensing of Environment (RSE) : Introduction ToДокумент32 страницыRemote Sensing of Environment (RSE) : Introduction ToCarl FranksОценок пока нет
- Assignment Gis 1Документ7 страницAssignment Gis 1Ummiey SyahirahОценок пока нет
- Art 02Документ7 страницArt 02rabatabdelОценок пока нет
- Basics of Remote Sensing and Gis Ce 333 Unit - 1 Remote SensingДокумент13 страницBasics of Remote Sensing and Gis Ce 333 Unit - 1 Remote SensingShanmuga SundaramОценок пока нет
- Very-Long-Baseline Interferometry VlbiДокумент9 страницVery-Long-Baseline Interferometry VlbiUlaba AmundeseОценок пока нет
- Solar Astrometry With Planetary TransitsДокумент13 страницSolar Astrometry With Planetary TransitsRaytrix PrestesОценок пока нет
- Well FillДокумент17 страницWell FillGokhanОценок пока нет
- Optical Turbulence Parameters Characterized Via Optical Measurements Over A 2.33 KM Free-Space Laser PathДокумент10 страницOptical Turbulence Parameters Characterized Via Optical Measurements Over A 2.33 KM Free-Space Laser PathayatОценок пока нет
- Determining Planetary Boundary Layer Height by Micro-Pulse Lidar With Validation by UAV Measurements - Aerosol and Air Quality ResearchДокумент15 страницDetermining Planetary Boundary Layer Height by Micro-Pulse Lidar With Validation by UAV Measurements - Aerosol and Air Quality ResearchRashmi SahuОценок пока нет
- What Is Imaging Spectroscopy (Hyperspectral Imaging) ?Документ37 страницWhat Is Imaging Spectroscopy (Hyperspectral Imaging) ?Linda NuryantiОценок пока нет
- Stacking of Large Interferometric Data Sets in The Image - and Uv-Domain - A Comparative StudyДокумент14 страницStacking of Large Interferometric Data Sets in The Image - and Uv-Domain - A Comparative StudyNomula Ravi Chandra ReddyОценок пока нет
- Ray Tracing (Physics)Документ5 страницRay Tracing (Physics)chuck333Оценок пока нет
- 978 1 4419 5710 8Документ482 страницы978 1 4419 5710 8physics.programmingОценок пока нет
- Reading Assignment Group 2Документ12 страницReading Assignment Group 2Marjorie TacordaОценок пока нет
- Supernova Acceleration Probe (Snap) : Investigating Photometric Redshift OptimizationДокумент30 страницSupernova Acceleration Probe (Snap) : Investigating Photometric Redshift OptimizationMarcosОценок пока нет
- Adaptive Optics in Astronomy V 3 AДокумент27 страницAdaptive Optics in Astronomy V 3 AWafer WafОценок пока нет
- Scientific Method Research Assignment: Biology and Society: Solar Flares in The Solar AtmosphereДокумент7 страницScientific Method Research Assignment: Biology and Society: Solar Flares in The Solar AtmosphereAniket ChatterjeeОценок пока нет
- 8418 8299 2 PBДокумент12 страниц8418 8299 2 PBAline Nell MoraesОценок пока нет
- Comparison of Four Methods For Estimating Total Light Interception by Apple Trees of Varying FormsДокумент5 страницComparison of Four Methods For Estimating Total Light Interception by Apple Trees of Varying FormsDeivid Silva de SouzaОценок пока нет
- Price 1973asasaasasasДокумент40 страницPrice 1973asasaasasasayakashimajorinОценок пока нет
- Francha IsДокумент1 страницаFrancha IsayakashimajorinОценок пока нет
- 1 s2.0 S2222180814604564 MsasasasaДокумент5 страниц1 s2.0 S2222180814604564 MsasasasaayakashimajorinОценок пока нет
- Polarization Vision: How Insects Find Their Way by Watching The SkyДокумент4 страницыPolarization Vision: How Insects Find Their Way by Watching The SkyayakashimajorinОценок пока нет
- 1 s2.0 S1011134414001080 MainuДокумент6 страниц1 s2.0 S1011134414001080 MainuayakashimajorinОценок пока нет
- 3493732aa PDFДокумент12 страниц3493732aa PDFayakashimajorinОценок пока нет
- Insect Rearing in Relation To Animal WelfareДокумент58 страницInsect Rearing in Relation To Animal WelfareayakashimajorinОценок пока нет
- Screening PDFДокумент36 страницScreening PDFayakashimajorinОценок пока нет
- Bio Con 2011Документ8 страницBio Con 2011ayakashimajorinОценок пока нет
- Solar Energy-Based Insect Pest Trap: SciencedirectДокумент6 страницSolar Energy-Based Insect Pest Trap: SciencedirectayakashimajorinОценок пока нет
- Ocellar Optics in Nocturnal and Diurnal Bees and Wasps: Eric J. Warrant, Almut Kelber, Rita Walle N, William T. WcisloДокумент13 страницOcellar Optics in Nocturnal and Diurnal Bees and Wasps: Eric J. Warrant, Almut Kelber, Rita Walle N, William T. WcisloayakashimajorinОценок пока нет
- Uv Color and Led Light Insect VisionДокумент6 страницUv Color and Led Light Insect VisionPawan KumarОценок пока нет
- Termoregulaclkjhe HmyzuДокумент10 страницTermoregulaclkjhe HmyzuayakashimajorinОценок пока нет
- 1 s2.0 S1467803911000703 MainДокумент12 страниц1 s2.0 S1467803911000703 MainayakashimajorinОценок пока нет
- 1 s2.0 S0042698908003222 MainjhДокумент10 страниц1 s2.0 S0042698908003222 MainjhayakashimajorinОценок пока нет
- Computers and Electronics in Agriculture: Anna Siedliska, Piotr Baranowski, Wojciech MazurekДокумент9 страницComputers and Electronics in Agriculture: Anna Siedliska, Piotr Baranowski, Wojciech MazurekayakashimajorinОценок пока нет
- Computers and Electronics in Agriculture: Yu Jiang, Zhenbo Li, Jingjing Fang, Jun Yue, Daoliang LiДокумент9 страницComputers and Electronics in Agriculture: Yu Jiang, Zhenbo Li, Jingjing Fang, Jun Yue, Daoliang LiayakashimajorinОценок пока нет
- Form Vision in The Insect Dorsal Ocelli: An Anatomical and Optical Analysis of The Locust OcelliДокумент12 страницForm Vision in The Insect Dorsal Ocelli: An Anatomical and Optical Analysis of The Locust OcelliayakashimajorinОценок пока нет
- Actin Microfilament of FungusДокумент6 страницActin Microfilament of FungusayakashimajorinОценок пока нет
- Key To Soil Taxonomy - Soil Survey StaffДокумент332 страницыKey To Soil Taxonomy - Soil Survey StaffDana100% (1)
- 1 s2.0 S0042698907000296 MainДокумент16 страниц1 s2.0 S0042698907000296 MainayakashimajorinОценок пока нет
- BMS AnnouncementДокумент1 страницаBMS AnnouncementayakashimajorinОценок пока нет
- Fungal Foes in Your GardenДокумент2 страницыFungal Foes in Your GardenayakashimajorinОценок пока нет
- Genomic Filamentous Fungi PDFДокумент5 страницGenomic Filamentous Fungi PDFayakashimajorinОценок пока нет
- Editorial Comment: Mycologist20 (2006) 1Документ1 страницаEditorial Comment: Mycologist20 (2006) 1ayakashimajorinОценок пока нет
- Ericoid MycorrhizalДокумент8 страницEricoid MycorrhizalayakashimajorinОценок пока нет
- Ethno My Co LogicalДокумент4 страницыEthno My Co LogicalayakashimajorinОценок пока нет
- Fungi of AntarcticДокумент1 страницаFungi of AntarcticayakashimajorinОценок пока нет
- Chapter 14 - Storm and Sanitary Analysis PDFДокумент41 страницаChapter 14 - Storm and Sanitary Analysis PDFdobridorinОценок пока нет
- Lab 2Документ8 страницLab 2Hamid SaeedОценок пока нет
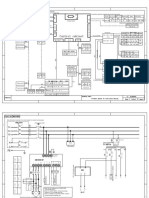
- Wire Diagram Complete Elevator - SL ELEVATOR 20190805Документ23 страницыWire Diagram Complete Elevator - SL ELEVATOR 20190805Eka Rama100% (2)
- YesДокумент80 страницYesRonnie TorresОценок пока нет
- Chemistry, Intermediate II Year Model Question PapersДокумент3 страницыChemistry, Intermediate II Year Model Question PapersAkshay PandeyОценок пока нет
- Catalog C60H-DCДокумент6 страницCatalog C60H-DCNae MocioiОценок пока нет
- Safety Inventory ExercisesДокумент12 страницSafety Inventory ExercisesParnabho KunduОценок пока нет
- A Simulation of Attempts To Influence Crowd Dynamics'Документ6 страницA Simulation of Attempts To Influence Crowd Dynamics'KhairulОценок пока нет
- Kill Sheet Calculation Steps, Formulas & Calculators - Drilling ManualДокумент7 страницKill Sheet Calculation Steps, Formulas & Calculators - Drilling ManualGourav RanaОценок пока нет
- OHT Estimates 50000 LtrsДокумент59 страницOHT Estimates 50000 LtrsSandgrouse RajОценок пока нет
- RISC Vs CISCДокумент13 страницRISC Vs CISCBehin SamОценок пока нет
- A Business Intelligence Framework For The FutureДокумент10 страницA Business Intelligence Framework For The Futuremcalbala100% (1)
- Woodward 2301D ManualДокумент104 страницыWoodward 2301D ManualAbdul Samad MahmoodОценок пока нет
- Cost BreakdownДокумент241 страницаCost Breakdownbilisuma sebokaОценок пока нет
- Transistor IRFP350Документ7 страницTransistor IRFP350MiguelAngelCedanoBurrolaОценок пока нет
- lm230wf1 Tla6Документ32 страницыlm230wf1 Tla6Charlie SierraОценок пока нет
- TCRT5000 PDFДокумент9 страницTCRT5000 PDFmazhar940Оценок пока нет
- Honcha QT6 16 PDFДокумент7 страницHoncha QT6 16 PDFSuhendra Amka PutraОценок пока нет
- DW-143 - Leakage Factor As Per Calculation FormulaДокумент2 страницыDW-143 - Leakage Factor As Per Calculation Formulasandeep7426Оценок пока нет
- Infopack 2016 enДокумент44 страницыInfopack 2016 enAlbertoОценок пока нет
- Test 4 Review SolutionsДокумент13 страницTest 4 Review SolutionsFabio Suta ArandiaОценок пока нет
- ABB I RWEДокумент1 страницаABB I RWEPredrag VucinicОценок пока нет
- Synopsis of Power FactorДокумент10 страницSynopsis of Power FactorRavi TiwariОценок пока нет
- Castrol - Iceomatic SW 68Документ7 страницCastrol - Iceomatic SW 68advantage025Оценок пока нет
- Multi Spindl Drilling MachineДокумент38 страницMulti Spindl Drilling MachineBoopathi KalaiОценок пока нет
- CH 19Документ147 страницCH 19Kathy YellaОценок пока нет
- Propeller Stockpile Measurement and Reports With Drone Surveying EbookДокумент17 страницPropeller Stockpile Measurement and Reports With Drone Surveying EbookmuazeemK100% (1)
- Digi Centre Operational TechnologyДокумент6 страницDigi Centre Operational Technologymtrego94410% (2)
- Fabshield Offshore 71ni-1Документ2 страницыFabshield Offshore 71ni-1Anonymous ejnktktkY7Оценок пока нет
- Watergems - How To Design A Water Distribution SystemДокумент3 страницыWatergems - How To Design A Water Distribution SystemhiyogsОценок пока нет
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessОт EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessОценок пока нет
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseОт EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseРейтинг: 3.5 из 5 звезд3.5/5 (69)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionОт EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionРейтинг: 4 из 5 звезд4/5 (812)
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldОт EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldРейтинг: 4.5 из 5 звезд4.5/5 (18)
- Why Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeОт EverandWhy Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeРейтинг: 4.5 из 5 звезд4.5/5 (699)
- Fire Season: Field Notes from a Wilderness LookoutОт EverandFire Season: Field Notes from a Wilderness LookoutРейтинг: 4 из 5 звезд4/5 (142)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldОт EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldРейтинг: 4 из 5 звезд4/5 (595)
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsОт EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsРейтинг: 3.5 из 5 звезд3.5/5 (13)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingОт EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingРейтинг: 5 из 5 звезд5/5 (5)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingОт EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingРейтинг: 3.5 из 5 звезд3.5/5 (35)
- The Other End of the Leash: Why We Do What We Do Around DogsОт EverandThe Other End of the Leash: Why We Do What We Do Around DogsРейтинг: 5 из 5 звезд5/5 (65)
- Spoiled Rotten America: Outrages of Everyday LifeОт EverandSpoiled Rotten America: Outrages of Everyday LifeРейтинг: 3 из 5 звезд3/5 (19)
- The Hidden Life of Trees: What They Feel, How They CommunicateОт EverandThe Hidden Life of Trees: What They Feel, How They CommunicateРейтинг: 4 из 5 звезд4/5 (1003)
- Come Back, Como: Winning the Heart of a Reluctant DogОт EverandCome Back, Como: Winning the Heart of a Reluctant DogРейтинг: 3.5 из 5 звезд3.5/5 (10)
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsОт EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsРейтинг: 4 из 5 звезд4/5 (223)
- The Hawk's Way: Encounters with Fierce BeautyОт EverandThe Hawk's Way: Encounters with Fierce BeautyРейтинг: 4.5 из 5 звезд4.5/5 (19)
- Remnants of Ancient Life: The New Science of Old FossilsОт EverandRemnants of Ancient Life: The New Science of Old FossilsРейтинг: 3 из 5 звезд3/5 (3)
- The Lives of Bees: The Untold Story of the Honey Bee in the WildОт EverandThe Lives of Bees: The Untold Story of the Honey Bee in the WildРейтинг: 4.5 из 5 звезд4.5/5 (44)
- Wicked Plants: The Weed That Killed Lincoln's Mother and Other Botanical AtrocitiesОт EverandWicked Plants: The Weed That Killed Lincoln's Mother and Other Botanical AtrocitiesРейтинг: 4 из 5 звезд4/5 (406)
- Soil: The Story of a Black Mother's GardenОт EverandSoil: The Story of a Black Mother's GardenРейтинг: 4.5 из 5 звезд4.5/5 (16)
- When the Sahara Was Green: How Our Greatest Desert Came to BeОт EverandWhen the Sahara Was Green: How Our Greatest Desert Came to BeРейтинг: 4.5 из 5 звезд4.5/5 (6)