Вам также может понравиться
- Congestion Driven PlacementДокумент25 страницCongestion Driven PlacementJayanth bemesettyОценок пока нет
- How To Use Dr. Foster's Essentials: Essential Oils and BlendsДокумент5 страницHow To Use Dr. Foster's Essentials: Essential Oils and BlendsemanvitoriaОценок пока нет
- 2 Days Machine Learning WorkshopДокумент10 страниц2 Days Machine Learning Workshopvpsampath0% (1)
- 2 Days Machine Learning WorkshopДокумент10 страниц2 Days Machine Learning Workshopvpsampath0% (1)
- Static Timing Analysis: January 05Документ57 страницStatic Timing Analysis: January 05Sandeep PatilОценок пока нет
- Embedded Systems Development Using SysMLДокумент68 страницEmbedded Systems Development Using SysMLboobalkrishnan2576Оценок пока нет
- 2019-Tessent® Scan and ATPG User's ManualДокумент724 страницы2019-Tessent® Scan and ATPG User's ManualAnand BvsОценок пока нет
- Sensor Hub Environment For Autonomous Cars: Mr. V. P. SampathДокумент3 страницыSensor Hub Environment For Autonomous Cars: Mr. V. P. SampathvpsampathОценок пока нет
- Verilog Interview Questions With Answers!Документ42 страницыVerilog Interview Questions With Answers!Vinod Lk95% (56)
- Testing of Repairable Embedded Memories in SoC Approach and ChallengesДокумент6 страницTesting of Repairable Embedded Memories in SoC Approach and Challengesassantiago1Оценок пока нет
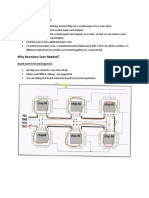
- Why Boundary Scan Needed?Документ39 страницWhy Boundary Scan Needed?srikanth100% (1)
- Schneider Power Supply PhaseoДокумент26 страницSchneider Power Supply PhaseoScott EnnisОценок пока нет
- Linux KernelДокумент174 страницыLinux KernelSuneet Saini100% (3)
- Test PointsДокумент21 страницаTest Pointsanusha killariОценок пока нет
- ASIC Verification - Static Timing AnalysisДокумент4 страницыASIC Verification - Static Timing AnalysisUTtОценок пока нет
- Manual de Uso Ecografo GE Logiq e PDFДокумент192 страницыManual de Uso Ecografo GE Logiq e PDFDaniel CortesОценок пока нет
- Why Use Lockup Latches to Prevent Hold ViolationsДокумент6 страницWhy Use Lockup Latches to Prevent Hold ViolationsNavdeep PanwarОценок пока нет
- DFT Interview Question2Документ1 страницаDFT Interview Question2pravallika vysyarajuОценок пока нет
- Asic Design Flow:: Specification FloorplanДокумент9 страницAsic Design Flow:: Specification Floorplanp gangadhar KumarОценок пока нет
- MBIST Verification Best Practices ChallengesДокумент5 страницMBIST Verification Best Practices ChallengessureshОценок пока нет
- Tap ControllerДокумент16 страницTap ControllerMoin PashaОценок пока нет
- How To Use Embedded Instruments and IJTAG-JTAG An IEEE P1687 Tutorial PDFДокумент10 страницHow To Use Embedded Instruments and IJTAG-JTAG An IEEE P1687 Tutorial PDFAnjali TailorОценок пока нет
- Scan Chain Insertion and ATPG Using Design Compiler and TetraMAXДокумент47 страницScan Chain Insertion and ATPG Using Design Compiler and TetraMAXLakshmi PrasadОценок пока нет
- Gate Level Simulation WPДокумент34 страницыGate Level Simulation WPHien HaОценок пока нет
- UncertaintyДокумент24 страницыUncertaintyramana459Оценок пока нет
- DFT With Tetramax PDFДокумент33 страницыDFT With Tetramax PDFdeepakk_alpineОценок пока нет
- Design For TestДокумент4 страницыDesign For TestDivya PatelОценок пока нет
- Using OCC For Full Scan Design PDFДокумент6 страницUsing OCC For Full Scan Design PDFUmesh ParasharОценок пока нет
- DFT (Design For Testability)Документ21 страницаDFT (Design For Testability)lavanyaОценок пока нет
- IDDQ TestingДокумент38 страницIDDQ TestingVeeranjaneyulu DhikondaОценок пока нет
- Sequential ATPGДокумент29 страницSequential ATPGSuhas Rohit Pai0% (1)
- Testing and Design-for-Testability (DFT) For Digital Integrated CircuitsДокумент95 страницTesting and Design-for-Testability (DFT) For Digital Integrated Circuitsnagabhairu anusha100% (1)
- Digital Testing: Key Concepts of Scan-Path DesignДокумент54 страницыDigital Testing: Key Concepts of Scan-Path DesignaguohaqdoОценок пока нет
- Compression AssignmentДокумент7 страницCompression Assignmentpoojithas acharya100% (1)
- Boundary ScanДокумент8 страницBoundary Scanmechbull11Оценок пока нет
- Study Plan NCEPU PDFДокумент2 страницыStudy Plan NCEPU PDFAhsan100% (1)
- Lab4 Testing DFTДокумент6 страницLab4 Testing DFTDeepuОценок пока нет
- Logic BIST Case Studies and Real IssuesДокумент10 страницLogic BIST Case Studies and Real IssuesprakashthamankarОценок пока нет
- Embedded Deterministic Test: by M. BalakrishnaДокумент28 страницEmbedded Deterministic Test: by M. Balakrishnasuryatejamula0% (1)
- VLSIGURU DFT TRAINING SCAN INSERTION LABДокумент2 страницыVLSIGURU DFT TRAINING SCAN INSERTION LABsenthilkumarОценок пока нет
- ATPG LAB OBSERVATIONSДокумент17 страницATPG LAB OBSERVATIONSsenthilkumarОценок пока нет
- Recursive Hierarchical DFT Methodology With Multi-Level Clock Control and Scan Pattern RetargetingДокумент4 страницыRecursive Hierarchical DFT Methodology With Multi-Level Clock Control and Scan Pattern Retargetingxiaojun lvОценок пока нет
- Clock Network Synthesis For Synchronous CircuitsДокумент59 страницClock Network Synthesis For Synchronous Circuitssai jagadeeshОценок пока нет
- Clock Gating: K.Harshavardhan 19021D6802 M-Tech (Vlsi & Es)Документ14 страницClock Gating: K.Harshavardhan 19021D6802 M-Tech (Vlsi & Es)Bunny harshaОценок пока нет
- Improving Gate-Level Simulation Performance Author: Gagandeep SinghДокумент34 страницыImproving Gate-Level Simulation Performance Author: Gagandeep SinghParthasarathy NarasimhanОценок пока нет
- StaДокумент91 страницаStaMohd Mayur100% (1)
- EDT Lab Observations AnalysisДокумент42 страницыEDT Lab Observations Analysispoojithas acharyaОценок пока нет
- VLSIGURU DFT TRAINING SCAN INSERTION LABДокумент2 страницыVLSIGURU DFT TRAINING SCAN INSERTION LABsenthilkumarОценок пока нет
- Vlsi TestingДокумент79 страницVlsi Testingkarnika143Оценок пока нет
- Jtag PresentationДокумент21 страницаJtag PresentationNivaz ChockkalingamОценок пока нет
- Static Timing Analysis - SureshДокумент33 страницыStatic Timing Analysis - SureshSuresh BharathОценок пока нет
- IJTAG Tutorial FINAL Circuitnet PDFДокумент9 страницIJTAG Tutorial FINAL Circuitnet PDFSairam Prasad MarataОценок пока нет
- Scan ChainsДокумент3 страницыScan Chainsnehasoni100% (1)
- Timing Paths: Timing Analysis Is Performed by Splitting The Design Into Different Paths Based OnДокумент3 страницыTiming Paths: Timing Analysis Is Performed by Splitting The Design Into Different Paths Based OnNandaОценок пока нет
- DFT Lbist PDFДокумент10 страницDFT Lbist PDFAman TyagiОценок пока нет
- DFT Tutorial PDFДокумент5 страницDFT Tutorial PDFVishwaОценок пока нет
- Dynamic Vs Static Timing AnalysisДокумент4 страницыDynamic Vs Static Timing AnalysismturadagiОценок пока нет
- Sample Vlsi ResumeДокумент2 страницыSample Vlsi ResumePavan KumarОценок пока нет
- LBIST - A Technique For Infield SafetyДокумент4 страницыLBIST - A Technique For Infield Safetyrahul1990bhatiaОценок пока нет
- An Introduction To DFT - Bridging & Switch Level FaultsДокумент24 страницыAn Introduction To DFT - Bridging & Switch Level FaultsNaga NitheshОценок пока нет
- Scan InsertionДокумент40 страницScan InsertionAmena FarhatОценок пока нет
- 15-Chapter 10 BSCAN 1500 PDFДокумент81 страница15-Chapter 10 BSCAN 1500 PDFVeeranjaneyulu DhikondaОценок пока нет
- Basic Timing Constraints TutorialДокумент34 страницыBasic Timing Constraints Tutorialapi-3737190100% (3)
- IEEE P1687 Security Design Hides Instrument AccessДокумент26 страницIEEE P1687 Security Design Hides Instrument AccesssrikanthОценок пока нет
- Assignment 1Документ3 страницыAssignment 1dheeraj.d JainОценок пока нет
- AOCVДокумент20 страницAOCVnaveenОценок пока нет
- TessentДокумент2 страницыTessentSivaramakrishna AnumoluОценок пока нет
- Jtag EXTEST OperationДокумент2 страницыJtag EXTEST OperationsrikanthОценок пока нет
- Layout Synthesis Benchmarks Focus on Speed, Skew, TestabilityДокумент10 страницLayout Synthesis Benchmarks Focus on Speed, Skew, TestabilityVishakh BharadwajОценок пока нет
- Voice Based Com PDFДокумент4 страницыVoice Based Com PDFvpsampathОценок пока нет
- 54W-28593-0 FPGA - ASIC SoC Article 91478 PDFДокумент3 страницы54W-28593-0 FPGA - ASIC SoC Article 91478 PDFvpsampathОценок пока нет
- White Paper Video and Image Processing Design Using Fpgas: Table 1. Resolutions by End Equipment TypesДокумент6 страницWhite Paper Video and Image Processing Design Using Fpgas: Table 1. Resolutions by End Equipment TypesvpsampathОценок пока нет
- Print 4210598 PDFДокумент7 страницPrint 4210598 PDFvpsampathОценок пока нет
- Tcp/IpДокумент67 страницTcp/IpprabaharjohnОценок пока нет
- Low Power Design of CMOS CircuitsДокумент45 страницLow Power Design of CMOS CircuitsvpsampathОценок пока нет
- Wireless ChannelsДокумент14 страницWireless ChannelsvpsampathОценок пока нет
- Tcp/IpДокумент67 страницTcp/IpprabaharjohnОценок пока нет
- Amba 3 AHB Lite Bus Architecture: ARM University ProgramДокумент29 страницAmba 3 AHB Lite Bus Architecture: ARM University ProgramvpsampathОценок пока нет
- TCP IpДокумент41 страницаTCP IpvpsampathОценок пока нет
- TclTkElRef803 PDFДокумент877 страницTclTkElRef803 PDFaspoiaspoiОценок пока нет
- Key Technologies For Future Wireless Systems: Software-Defined Radio in Commercial Radio SystemsДокумент17 страницKey Technologies For Future Wireless Systems: Software-Defined Radio in Commercial Radio SystemsvpsampathОценок пока нет
- Full ThesisДокумент95 страницFull ThesisboisolivierОценок пока нет
- Pipeline FFT Architecture ImplementationДокумент78 страницPipeline FFT Architecture ImplementationvpsampathОценок пока нет
- 54W-28593-0 FPGA - ASIC SoC Article 91478 PDFДокумент3 страницы54W-28593-0 FPGA - ASIC SoC Article 91478 PDFvpsampathОценок пока нет
- Pitfalls For Logical Equivalence CheckДокумент4 страницыPitfalls For Logical Equivalence CheckvpsampathОценок пока нет
- Asic Prototyping11 TP PDFДокумент11 страницAsic Prototyping11 TP PDFvpsampathОценок пока нет
- Wavekit API For Log Generation PDFДокумент15 страницWavekit API For Log Generation PDFvpsampathОценок пока нет
- 1990 Fujitsu Channelless Gate ArraysДокумент1 140 страниц1990 Fujitsu Channelless Gate ArraysvpsampathОценок пока нет
- SVTB Refresher 1.3cДокумент134 страницыSVTB Refresher 1.3cvpsampathОценок пока нет
- A Specification-Driven Methodology For The Design and Verification of Reset Domain Crossing LogicДокумент8 страницA Specification-Driven Methodology For The Design and Verification of Reset Domain Crossing LogicKiran Kumar ParlapalliОценок пока нет
- FPGA TCL Scripting 2014 02 24 PDFДокумент13 страницFPGA TCL Scripting 2014 02 24 PDFvpsampathОценок пока нет
- Learn Perl in 2hrs 30 MinДокумент45 страницLearn Perl in 2hrs 30 MinvpsampathОценок пока нет
- Learn Perl in 2hrs 30 MinДокумент45 страницLearn Perl in 2hrs 30 MinvpsampathОценок пока нет
- 4TWX4036 Service FactsДокумент4 страницы4TWX4036 Service FactsAlejandro OrdoñezОценок пока нет
- Structural Notes SampleДокумент14 страницStructural Notes SampleNicole FrancisОценок пока нет
- Alternator NotesДокумент24 страницыAlternator Notesarunima arunimaОценок пока нет
- Minicargador Cat 246Документ22 страницыMinicargador Cat 246Juanca FerroОценок пока нет
- Prometheus BoundДокумент10 страницPrometheus BoundPhillip HosfeldtОценок пока нет
- ArtsДокумент5 страницArtsRhovi Christine AbandoОценок пока нет
- Multi Purpose StadiumДокумент130 страницMulti Purpose StadiumEmmanuel SolomonОценок пока нет
- Divide and Conquer (Closest Pair, Convex Hull, Strassen Matrix Multiply) DemoДокумент27 страницDivide and Conquer (Closest Pair, Convex Hull, Strassen Matrix Multiply) DemoAnand KumarОценок пока нет
- Dr. Carlos S. Lanting College: College of Maritime EducationДокумент14 страницDr. Carlos S. Lanting College: College of Maritime EducationJeynard Moler J. TanОценок пока нет
- Spcr-TagbayaganДокумент76 страницSpcr-TagbayaganReycia Vic QuintanaОценок пока нет
- Aac Block Adhesive: Product DescriptionДокумент2 страницыAac Block Adhesive: Product DescriptionmaznahОценок пока нет
- Briefing Paper No 4 CV Electrification 30 11 17 PDFДокумент5 страницBriefing Paper No 4 CV Electrification 30 11 17 PDFAlex WoodrowОценок пока нет
- P198 Software and Atlases For Evaluating Thermal Bridges 0Документ10 страницP198 Software and Atlases For Evaluating Thermal Bridges 0cm08909Оценок пока нет
- Technical Data Speedmaster CX 104Документ2 страницыTechnical Data Speedmaster CX 104Vinh Lê HữuОценок пока нет
- Durango GS 6-7 Helitack OutreachДокумент4 страницыDurango GS 6-7 Helitack OutreachdcgmОценок пока нет
- ABB Price Book 714Документ1 страницаABB Price Book 714EliasОценок пока нет
- New Debashish & HemantДокумент31 страницаNew Debashish & HemantEshwar KothapalliОценок пока нет
- Experimental Design and Optimization MethodsДокумент38 страницExperimental Design and Optimization MethodssudalaiyandiОценок пока нет
- Vectors FoundationДокумент8 страницVectors FoundationNaning RarasОценок пока нет
- Matlab For SolidworksДокумент18 страницMatlab For SolidworksAle' AmoudiОценок пока нет
- DOCUMENT guides the way with VLB-44 LED Marine BeaconДокумент4 страницыDOCUMENT guides the way with VLB-44 LED Marine BeaconbenОценок пока нет
- Educ 211 Ancient EgyptДокумент27 страницEduc 211 Ancient Egyptapi-207262700Оценок пока нет
- Tyco TY8281 TFP680 - 03 - 2023Документ17 страницTyco TY8281 TFP680 - 03 - 2023First LAstОценок пока нет
- TED BENTON: Is Capitalism Sustainable?Документ2 страницыTED BENTON: Is Capitalism Sustainable?api-25932856Оценок пока нет
- Higher-Order InteractionsДокумент6 страницHigher-Order Interactions山木Оценок пока нет
- The Focus Shooting Method CourseДокумент48 страницThe Focus Shooting Method CourseKobiXDОценок пока нет