Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Response of Thermal Newtonian and Non-Newtonian E H L To The Vertical Vibration of A RollerДокумент9 страницThe Response of Thermal Newtonian and Non-Newtonian E H L To The Vertical Vibration of A RollerJuan Pablo Cano MejiaОценок пока нет
- Mechanism of Metal Doping Effect On Lubricity of DLC FilmsДокумент5 страницMechanism of Metal Doping Effect On Lubricity of DLC FilmsJuan Pablo Cano MejiaОценок пока нет
- A B, Michael: Performance and Surface Analysis of Tapered Bearings Lubricated With A Manual Transmission FluidДокумент11 страницA B, Michael: Performance and Surface Analysis of Tapered Bearings Lubricated With A Manual Transmission FluidJuan Pablo Cano MejiaОценок пока нет
- Institute of Tribology The Institut National Des Sciences Appliqu EsДокумент1 страницаInstitute of Tribology The Institut National Des Sciences Appliqu EsJuan Pablo Cano MejiaОценок пока нет
- Direct Observation of The Behaviour of Real Surface Roughness Passing Through EHD Point ContactДокумент10 страницDirect Observation of The Behaviour of Real Surface Roughness Passing Through EHD Point ContactJuan Pablo Cano MejiaОценок пока нет
- TS 2003 - 17Документ1 страницаTS 2003 - 17Juan Pablo Cano MejiaОценок пока нет
- Courtial Et Al.2003 Revised Manuscript Powder DiffractionДокумент20 страницCourtial Et Al.2003 Revised Manuscript Powder DiffractionJuan Pablo Cano MejiaОценок пока нет
- Failure Analysis of Engineering Structures Methodology and Case HistoriesДокумент206 страницFailure Analysis of Engineering Structures Methodology and Case Historiesdennis_dizon_6100% (4)
- Basic Elements of CrystallographyДокумент207 страницBasic Elements of CrystallographyErnesto Rodriguez86% (7)
- Advanced Ceramic Processing and TechnologyДокумент421 страницаAdvanced Ceramic Processing and TechnologyJuan Pablo Cano Mejia100% (2)
- Introduction of Powder Diffraction INDIAДокумент397 страницIntroduction of Powder Diffraction INDIAJuan Pablo Cano Mejia100% (1)
- Dynamic Analysis of Loads and Stresses in Connecting RodsДокумент10 страницDynamic Analysis of Loads and Stresses in Connecting RodsJuan Pablo Cano MejiaОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Lesson For SpreadsheetsДокумент69 страницLesson For SpreadsheetsCrisna Rivera PundanoОценок пока нет
- Group H Macroeconomics Germany InflationДокумент13 страницGroup H Macroeconomics Germany Inflationmani kumarОценок пока нет
- 3a. Systems Approach To PoliticsДокумент12 страниц3a. Systems Approach To PoliticsOnindya MitraОценок пока нет
- 13) Api 510 Day 5Документ50 страниц13) Api 510 Day 5hamed100% (1)
- Review of Financial Statements and Its Analysis: Rheena B. Delos Santos BSBA-1A (FM2)Документ12 страницReview of Financial Statements and Its Analysis: Rheena B. Delos Santos BSBA-1A (FM2)RHIAN B.Оценок пока нет
- Soal TKM B. Inggris Kls XII Des. 2013Документ8 страницSoal TKM B. Inggris Kls XII Des. 2013Sinta SilviaОценок пока нет
- 06 BuyLog2013 MoldedCaseCircBrkrsДокумент106 страниц06 BuyLog2013 MoldedCaseCircBrkrsmarbyОценок пока нет
- Aditya Birla Sun Life Insurance Secureplus Plan: Dear MR Kunjal Uin - 109N102V02Документ7 страницAditya Birla Sun Life Insurance Secureplus Plan: Dear MR Kunjal Uin - 109N102V02kunjal mistryОценок пока нет
- Preventive Maintenance Checklist: Tool Room & Production SawsДокумент2 страницыPreventive Maintenance Checklist: Tool Room & Production SawsValerio Ambrocio IsmaelОценок пока нет
- An Overview of The Geostatistical Analyst Toolbar and ToolboxДокумент1 страницаAn Overview of The Geostatistical Analyst Toolbar and ToolboxSumit SumanОценок пока нет
- Guidelines For New Students - 2022Документ14 страницGuidelines For New Students - 2022Ria Faye PaderangaОценок пока нет
- Details For Order #002 5434861 1225038: Not Yet ShippedДокумент1 страницаDetails For Order #002 5434861 1225038: Not Yet ShippedSarai NateraОценок пока нет
- AngularJS Cheat SheetДокумент3 страницыAngularJS Cheat SheetZulqarnain Hashmi100% (1)
- Chapter 3 SampleДокумент12 страницChapter 3 Samplesyarifah53Оценок пока нет
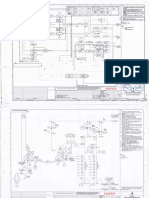
- Attachment 05 - BFD, ELD and P&I Diagrams-PearlДокумент77 страницAttachment 05 - BFD, ELD and P&I Diagrams-Pearlum er100% (1)
- Piccadilly Circus BusДокумент1 страницаPiccadilly Circus Busmeylota2Оценок пока нет
- Analytical Profiles Drug Substances and Excipien T S: Harry G. BrittainДокумент693 страницыAnalytical Profiles Drug Substances and Excipien T S: Harry G. BrittainNguyen TriОценок пока нет
- Muhammad Safuan Othman (CD 4862)Документ24 страницыMuhammad Safuan Othman (CD 4862)Andy100% (1)
- ZX400LCH 5GДокумент16 страницZX400LCH 5Gusmanitp2Оценок пока нет
- Cattle Feed Close Tenders in BikanerДокумент9 страницCattle Feed Close Tenders in BikanerCodm DutyОценок пока нет
- CV Rafi Cargill, GAR, MCR, AM GROUP and Consultancy EraДокумент6 страницCV Rafi Cargill, GAR, MCR, AM GROUP and Consultancy EranorulainkОценок пока нет
- Variable Length Subnet MasksДокумент4 страницыVariable Length Subnet MaskszelalemОценок пока нет
- Evaporator EfficiencyДокумент15 страницEvaporator EfficiencySanjaySinghAdhikariОценок пока нет
- Octopus 900 Instructions For UseДокумент18 страницOctopus 900 Instructions For UseAli FadhilОценок пока нет
- Challan FormДокумент2 страницыChallan FormSingh KaramvirОценок пока нет
- Water Cooled Centrifugal Chiller (150-3000RT)Документ49 страницWater Cooled Centrifugal Chiller (150-3000RT)remigius yudhiОценок пока нет
- Research On Surface Roughness by Laser CДокумент5 страницResearch On Surface Roughness by Laser CfatmirhusejniОценок пока нет
- Blockchain Unit Wise Question BankДокумент3 страницыBlockchain Unit Wise Question BankMeghana50% (4)
- Modeling Cover Letter No ExperienceДокумент7 страницModeling Cover Letter No Experienceimpalayhf100% (1)
- Low Cost HousingДокумент5 страницLow Cost HousingReigna SantillanaОценок пока нет