Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Network Analyzer BasicsДокумент124 страницыNetwork Analyzer BasicsmasreboОценок пока нет
- Icemc ManualДокумент262 страницыIcemc ManualIban Barrutia InzaОценок пока нет
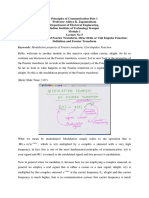
- Keywords: Modulation Property of Fourier Transform, Unit Impulse FunctionДокумент16 страницKeywords: Modulation Property of Fourier Transform, Unit Impulse FunctionghalzaiОценок пока нет
- DAJJAL 2 by Mufti Abu Lubaba Shah MansoorДокумент250 страницDAJJAL 2 by Mufti Abu Lubaba Shah MansoorInnaam Ijaz100% (1)
- Lec 04 PDFДокумент14 страницLec 04 PDFghalzaiОценок пока нет
- Subcarrier Grouping OFDM For Visible-Light Communication SystemsДокумент13 страницSubcarrier Grouping OFDM For Visible-Light Communication SystemsghalzaiОценок пока нет
- 574 FTP Comp DHTДокумент9 страниц574 FTP Comp DHTghalzaiОценок пока нет
- Attendance Sheet Digital Signal Processing BCE SP12Документ2 страницыAttendance Sheet Digital Signal Processing BCE SP12ghalzaiОценок пока нет
- ZAO CourseCatalogue 2013Документ16 страницZAO CourseCatalogue 2013ghalzaiОценок пока нет
- Concept Description: Joint Work Between: CRC (Canada) ETRI (Korea) UPV/EHU (Spain)Документ1 страницаConcept Description: Joint Work Between: CRC (Canada) ETRI (Korea) UPV/EHU (Spain)ghalzaiОценок пока нет
- COMSATS Institute of Information Technology Lahore: COMSATS - Lancaster Dual Degree ProgrammeДокумент1 страницаCOMSATS Institute of Information Technology Lahore: COMSATS - Lancaster Dual Degree ProgrammeghalzaiОценок пока нет
- Rooms SP14 140212 0920Документ9 страницRooms SP14 140212 0920ghalzaiОценок пока нет
- Org DataДокумент1 страницаOrg DataghalzaiОценок пока нет
- 99ebook Com ErrataДокумент12 страниц99ebook Com ErrataghalzaiОценок пока нет
- Topics - Signals and SystemsДокумент3 страницыTopics - Signals and SystemsghalzaiОценок пока нет
- Dielectric Resonator Antenna Theory Anf FabricationДокумент39 страницDielectric Resonator Antenna Theory Anf FabricationjacnjillОценок пока нет
- Workshop 5-1: Dynamic Link: ANSYS HFSS For Antenna DesignДокумент32 страницыWorkshop 5-1: Dynamic Link: ANSYS HFSS For Antenna DesignRicardo MichelinОценок пока нет
- MIM Cap ModelДокумент4 страницыMIM Cap ModelDuc DucОценок пока нет
- Quick Guide For Ansoft Designer SVДокумент1 страницаQuick Guide For Ansoft Designer SVTran Quang Thai B1708908Оценок пока нет
- UNIT 1 PPT Microwave TubesДокумент45 страницUNIT 1 PPT Microwave Tubesmanav aОценок пока нет
- T Junction in HFSSДокумент27 страницT Junction in HFSSUtah UtahОценок пока нет
- "Hfss (High Frequency Structural Simulator) Tutorial ": Dr. Pinku Ranjan Abv-Iiitm GwaliorДокумент76 страниц"Hfss (High Frequency Structural Simulator) Tutorial ": Dr. Pinku Ranjan Abv-Iiitm GwaliorPratiksha GuptaОценок пока нет
- W2&W3. Ch2.0 Transmission Line Theory v0.2Документ74 страницыW2&W3. Ch2.0 Transmission Line Theory v0.2zetty_rashidОценок пока нет
- ZVA ZVB ZVT OperatingManual en 31Документ1 181 страницаZVA ZVB ZVT OperatingManual en 31Edward PenaОценок пока нет
- EC2403 RF and Microwave EngineeringДокумент152 страницыEC2403 RF and Microwave EngineeringKushal MpvsОценок пока нет
- A High Frequency Equivalent Circuit and Parameter Extraction Procedure For Common Mode Choke in The EMI FilterДокумент10 страницA High Frequency Equivalent Circuit and Parameter Extraction Procedure For Common Mode Choke in The EMI FilterYea Ji HanОценок пока нет
- Lecture 4 Chap 31Документ75 страницLecture 4 Chap 31Bitew AyalewОценок пока нет
- Microwave Amlifier Design Azrar PDFДокумент48 страницMicrowave Amlifier Design Azrar PDFZakaria MounirОценок пока нет
- Power Waves and The Scattering Matrix: V%+ Z%ibДокумент9 страницPower Waves and The Scattering Matrix: V%+ Z%ibsanjeevsoni64Оценок пока нет
- Z MatchДокумент2 страницыZ MatchamrehmaniОценок пока нет
- Antennas and Microwave EngineeringДокумент4 страницыAntennas and Microwave EngineeringOral RobertzОценок пока нет
- Using Advanced Design System To Design An Mmic Amplifier: Keysight Eesof EdaДокумент40 страницUsing Advanced Design System To Design An Mmic Amplifier: Keysight Eesof EdaAbinash Singh RajputОценок пока нет
- BE MWE MaterialДокумент81 страницаBE MWE Materialsravan_4510% (1)
- A 77 GHZ Cmos Low Noise Amplifier For Automotive Radar ReceiverДокумент3 страницыA 77 GHZ Cmos Low Noise Amplifier For Automotive Radar ReceiverJeong-geun KimОценок пока нет
- Kurokawa - Power Waves and Scattering Matrix 1965Документ11 страницKurokawa - Power Waves and Scattering Matrix 1965codex35100% (1)
- HFSS TDR For Coax BendДокумент41 страницаHFSS TDR For Coax BendApОценок пока нет
- 15A04703 Microwave EngineeringДокумент1 страница15A04703 Microwave EngineeringKumar ChandrasekharОценок пока нет
- Stucor QP Ec8701Документ6 страницStucor QP Ec8701diamond puppyОценок пока нет
- Polarization Diversity Controllable Monopulse Antenna Array DesignДокумент7 страницPolarization Diversity Controllable Monopulse Antenna Array DesignSyed BukhariОценок пока нет
- Datasheet S2VNAДокумент28 страницDatasheet S2VNAHever RodriguezОценок пока нет
- CCMW Unit3&4Документ176 страницCCMW Unit3&4rahul gupta100% (2)
- FERRITE CirculatorДокумент10 страницFERRITE CirculatorJay DethaliaОценок пока нет
- Low-Noise AmplifierДокумент115 страницLow-Noise AmplifierAar Kay Gautam100% (1)