Вам также может понравиться
- 51W 10540 1Документ16 страниц51W 10540 1Mitrofan AnduОценок пока нет
- 200watt Active Load UnitДокумент14 страниц200watt Active Load Unitagmnm1962Оценок пока нет
- A Compact Ultra-Wideband Power Divider With High Isolation 3.1-10.6 GHZДокумент2 страницыA Compact Ultra-Wideband Power Divider With High Isolation 3.1-10.6 GHZagmnm1962Оценок пока нет
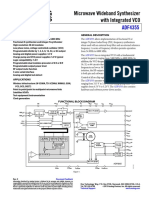
- ADF4355 54-6800 MHZ Microwave Wideband Synthesizer With Integrated VCOДокумент35 страницADF4355 54-6800 MHZ Microwave Wideband Synthesizer With Integrated VCOagmnm1962Оценок пока нет
- Scr's & Triacs Cross ReferenceДокумент11 страницScr's & Triacs Cross Referenceagmnm1962Оценок пока нет
- LXA-7500 Series X-Band Low Noise AmplifiersДокумент4 страницыLXA-7500 Series X-Band Low Noise Amplifiersagmnm1962Оценок пока нет
- Variable High Voltage BJT Regulator User ManualДокумент7 страницVariable High Voltage BJT Regulator User Manualagmnm1962Оценок пока нет
- Data Sheet: UHF Push-Pull Power MOS TransistorДокумент15 страницData Sheet: UHF Push-Pull Power MOS Transistoragmnm1962Оценок пока нет
- Sp431 High Voltage Adjustable Precision Shunt RegulatorsДокумент11 страницSp431 High Voltage Adjustable Precision Shunt Regulatorsagmnm1962Оценок пока нет
- A Review of Implantable Antennas For Wireless Biomedical DevicesДокумент11 страницA Review of Implantable Antennas For Wireless Biomedical Devicesagmnm1962Оценок пока нет
- Driven Right Leg Circuit DesignДокумент5 страницDriven Right Leg Circuit Designagmnm1962Оценок пока нет
- LT1167 Instr AmpДокумент20 страницLT1167 Instr Ampagmnm1962Оценок пока нет
- A New Calculation For Designing Multilayer Planar Spiral InductorsДокумент4 страницыA New Calculation For Designing Multilayer Planar Spiral Inductorsagmnm1962Оценок пока нет
- (Leslie Green) RF-Inductor Modeling For The 21st CДокумент5 страниц(Leslie Green) RF-Inductor Modeling For The 21st CBeeresha R SОценок пока нет
- Bio Amps NotesДокумент9 страницBio Amps Notesagmnm1962Оценок пока нет
- A Compact Dual-Band Dual-Polarized Patch AntennaДокумент7 страницA Compact Dual-Band Dual-Polarized Patch Antennaagmnm19620% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Al Gro Back DrillДокумент30 страницAl Gro Back Drilla_damrongОценок пока нет
- A Practical Activity Report Submitted For Engineering Design Project-II (UTA-014) byДокумент7 страницA Practical Activity Report Submitted For Engineering Design Project-II (UTA-014) byNavneet Singh Negi0% (1)
- P&F SensorДокумент3 страницыP&F SensorBulk WeighingОценок пока нет
- Stability Analysis in DTCS: DR V S Krushnasamy Associate ProfessorДокумент58 страницStability Analysis in DTCS: DR V S Krushnasamy Associate Professorkrushnasamy subramaniyanОценок пока нет
- Midi Leaflet 3Документ6 страницMidi Leaflet 3domparker1234Оценок пока нет
- The Discrete Fourier SeriesДокумент20 страницThe Discrete Fourier SeriesAlamgir Ahmad KhattakОценок пока нет
- Corrigo E - User Manual: HeatingДокумент28 страницCorrigo E - User Manual: HeatingNenoОценок пока нет
- FastE Product-Decription Issue2 15jun05Документ16 страницFastE Product-Decription Issue2 15jun05sallomao3Оценок пока нет
- DSP Lab SyllabusДокумент3 страницыDSP Lab SyllabusKiranKumarОценок пока нет
- Mark Sheet: Diploma/Proficiency Certificate LevelДокумент1 страницаMark Sheet: Diploma/Proficiency Certificate LevelThe EqualiZerОценок пока нет
- Introduction To SCRДокумент19 страницIntroduction To SCRAlbin RobinОценок пока нет
- Datos Planta LL2014LДокумент4 страницыDatos Planta LL2014LKelly MàrquezОценок пока нет
- Grade 10 Lesson Plan Electricity and MagnetisДокумент6 страницGrade 10 Lesson Plan Electricity and MagnetisNicko Rodolfo100% (1)
- Tyco Biffi Icon 2000 PDFДокумент30 страницTyco Biffi Icon 2000 PDFDarius GarbuОценок пока нет
- Ultra Sonic DectorДокумент2 страницыUltra Sonic DectorSAMO SAMARAОценок пока нет
- Digital Logic Design: Dr. M. Najam Ul Islam PHD Electrical EngineeringДокумент26 страницDigital Logic Design: Dr. M. Najam Ul Islam PHD Electrical EngineeringS.M.Abbas Zadi.Оценок пока нет
- I18n en-USДокумент55 страницI18n en-USVelezОценок пока нет
- Twido TWDLCAE40DRFДокумент11 страницTwido TWDLCAE40DRFErika BecerraОценок пока нет
- Easy SimДокумент10 страницEasy SimAnonymous aEW7rNorОценок пока нет
- Matlab ResumeДокумент4 страницыMatlab ResumePhoenix RulzОценок пока нет
- Digital Ic Applications NOTES (R-16) : Giet College of EngineeringДокумент11 страницDigital Ic Applications NOTES (R-16) : Giet College of Engineeringakhila pemmarajuОценок пока нет
- Tb6560 3A Stepper Motor Driver Board: User ManualДокумент6 страницTb6560 3A Stepper Motor Driver Board: User ManualJorge LaglaiveОценок пока нет
- De EsserДокумент11 страницDe EsserAndy MillerОценок пока нет
- LCDF3 Chap 03 P1Документ54 страницыLCDF3 Chap 03 P1boymatterОценок пока нет
- Silicon Controlled RectifierДокумент1 страницаSilicon Controlled RectifierJazzel Avila ParadiseОценок пока нет
- Fukuda Denshi FCP-2155 ECG - Service ManualДокумент136 страницFukuda Denshi FCP-2155 ECG - Service ManualEzequiel Melendres100% (1)
- TLE-Computer Systems Servicing 7 Third: PanimulaДокумент4 страницыTLE-Computer Systems Servicing 7 Third: PanimulaFlorinda Gagasa100% (1)
- Buzzer Con ArduinoДокумент8 страницBuzzer Con ArduinoCell Tucuman Cell TucumanОценок пока нет
- NEC Article 555Документ11 страницNEC Article 555faneveslucas_4723330Оценок пока нет
- Diagnostico, Problemas y Reparacion de Chillers Trane Serie RTAДокумент88 страницDiagnostico, Problemas y Reparacion de Chillers Trane Serie RTAppslaredo100% (4)