Вам также может понравиться
- Mecanique GeneralДокумент90 страницMecanique GeneralFodil ZouziОценок пока нет
- Oraux Polytechnique Physique MP 2019Документ48 страницOraux Polytechnique Physique MP 2019samuel akaОценок пока нет
- Lagrange Cours PDFДокумент6 страницLagrange Cours PDFAlinour ViОценок пока нет
- Turb M2 Exam0809Документ4 страницыTurb M2 Exam0809issaОценок пока нет
- Physique v2Документ12 страницPhysique v2laila.kridah15Оценок пока нет
- Exercices Electromagn TismeДокумент39 страницExercices Electromagn Tismeabdel_bouОценок пока нет
- DM8 SolДокумент9 страницDM8 Solmehdi benmassoudОценок пока нет
- Correction de Serie 2 - Master2 en - RenДокумент2 страницыCorrection de Serie 2 - Master2 en - Renmessage4you.11Оценок пока нет
- OcillateursДокумент77 страницOcillateursreneОценок пока нет
- AIDER - Yacine - Rapport Final - PK2Документ16 страницAIDER - Yacine - Rapport Final - PK2parck666Оценок пока нет
- Physisque MP 2019 PDFДокумент48 страницPhysisque MP 2019 PDFahmed aboulkacemОценок пока нет
- PumpingДокумент10 страницPumpingAngelОценок пока нет
- 15 MP Sujet PhyДокумент8 страниц15 MP Sujet PhyHarakat ElhoucineОценок пока нет
- Chap 1Документ24 страницыChap 1henryОценок пока нет
- ManuscritДокумент75 страницManuscritanass sbniОценок пока нет
- Formule ThermoélasticitéДокумент8 страницFormule ThermoélasticitéRifi Mohamed100% (1)
- DM ChocfrontalДокумент3 страницыDM ChocfrontalLouis PouchepadassОценок пока нет
- Ch8 Approximation HarmoniqueДокумент12 страницCh8 Approximation HarmoniquellagrangОценок пока нет
- Gratte-Ciels Et Tours: A 2007 Phys. Ii MPДокумент6 страницGratte-Ciels Et Tours: A 2007 Phys. Ii MPMihnea GamanОценок пока нет
- Cours Mécanique Analytique Et VibrationsДокумент39 страницCours Mécanique Analytique Et Vibrationsdaongocha108100% (1)
- Exp06 Pendules Couples PDFДокумент11 страницExp06 Pendules Couples PDFRida bellarraneОценок пока нет
- MP PHYSIQUE X 1 2015.enonceДокумент8 страницMP PHYSIQUE X 1 2015.enoncechaddad abdllahОценок пока нет
- 5-Milieux À PertesДокумент9 страниц5-Milieux À Pertesimane takhiОценок пока нет
- Polycopie Phys3Документ98 страницPolycopie Phys3Yassine LachouriОценок пока нет
- TDMeca 5Документ3 страницыTDMeca 5Ihsan Mokhlisse100% (1)
- Satistique smp5Документ66 страницSatistique smp5elfaitehbrahimОценок пока нет
- Ondes Et Vibrations - Chap - 01 PDFДокумент40 страницOndes Et Vibrations - Chap - 01 PDFBoudjema SoudedОценок пока нет
- DL2 SolДокумент5 страницDL2 SolLarbi BadrourОценок пока нет
- Chapitre 1 Complet v2Документ8 страницChapitre 1 Complet v2y6mzjj92ycОценок пока нет
- PDF Introduction Cours Hors Equilibre 2008Документ21 страницаPDF Introduction Cours Hors Equilibre 2008Alexis BlaiseОценок пока нет
- TP Pendule Simple MISEM1EREE1Документ8 страницTP Pendule Simple MISEM1EREE1YassinОценок пока нет
- Ex SI2014 FRДокумент8 страницEx SI2014 FRloriedonfack965Оценок пока нет
- Pendules CouplesДокумент22 страницыPendules CouplesAbdessadek HamdaouiОценок пока нет
- TD Ondes Meca-Acous 20PCДокумент39 страницTD Ondes Meca-Acous 20PCmarcel478435Оценок пока нет
- MecaДокумент8 страницMecaAbde DilamОценок пока нет
- Ligne CoaxialeДокумент4 страницыLigne Coaxiales2pkdskwdkОценок пока нет
- Distribution de Charge Et de CourantДокумент12 страницDistribution de Charge Et de CourantMaria SeltanaОценок пока нет
- Exo Hiver2006 07Документ84 страницыExo Hiver2006 07Lilia BennaceurОценок пока нет
- CCP-MP I 1999 - Particule Dans Une Cuvette ParaboliqueДокумент5 страницCCP-MP I 1999 - Particule Dans Une Cuvette ParaboliqueSaraEA0% (2)
- Partiel MA 2022 FRДокумент3 страницыPartiel MA 2022 FRBenjamin SeguinОценок пока нет
- Abdennadher - 2013 - Instabilités de Rayleigh Bénard Sous Vibrations Hautes Fréquences Par Une Méthode de RéductionДокумент6 страницAbdennadher - 2013 - Instabilités de Rayleigh Bénard Sous Vibrations Hautes Fréquences Par Une Méthode de RéductionMehdi ChentoufОценок пока нет
- Cours Meca PhytemДокумент17 страницCours Meca PhytemTRAOREОценок пока нет
- CnamC42 2008 PDFДокумент12 страницCnamC42 2008 PDFChakir LaiminaОценок пока нет
- Ondchap 3Документ15 страницOndchap 3safa benelkadiОценок пока нет
- Cours 03 Principe Fondamental de La Dynamique PDFДокумент3 страницыCours 03 Principe Fondamental de La Dynamique PDFDamien Miranda50% (2)
- Régime Transitoire Dans Les Systèmes PhysiquesДокумент10 страницRégime Transitoire Dans Les Systèmes PhysiquesPiedmondОценок пока нет
- Formulaire Dynamique de StructuresДокумент7 страницFormulaire Dynamique de Structuresksecas_1Оценок пока нет
- Principes de ThermodynamiqueДокумент15 страницPrincipes de Thermodynamiquenajim68100% (1)
- Hydrodynamique Et Turbulence (Exercice Instabilité Gravitationnelle)Документ8 страницHydrodynamique Et Turbulence (Exercice Instabilité Gravitationnelle)Scribd ReaderОценок пока нет
- Systemes 1ddlДокумент21 страницаSystemes 1ddlYoucef BenhalilemОценок пока нет
- MP Physique Mines 1 2007.extraitДокумент4 страницыMP Physique Mines 1 2007.extraitJamilОценок пока нет
- Cours 1 Systèmes Mécaniques OscillantsДокумент6 страницCours 1 Systèmes Mécaniques OscillantsbidaouimounirОценок пока нет
- Poly Mécanique Générale 2017Документ37 страницPoly Mécanique Générale 2017Houssem BassalahОценок пока нет
- Exercices d'intégrales et d'équations intégro-différentiellesОт EverandExercices d'intégrales et d'équations intégro-différentiellesОценок пока нет
- Relativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueОт EverandRelativité restreinte, mécanique quantique et relativité générale: Base physique et mathématique de la relativité restreinte et générale et de la mécanique quantiqueОценок пока нет
- Lagrange PDFДокумент76 страницLagrange PDFRobin CookОценок пока нет
- Cours mecaIII - 2014 2 PDFДокумент83 страницыCours mecaIII - 2014 2 PDFRobin CookОценок пока нет
- Meca IIДокумент142 страницыMeca IIMarcusSil100% (1)
- Chapitre 1 PDFДокумент8 страницChapitre 1 PDFRobin CookОценок пока нет
- Na Pendinvc PDFДокумент19 страницNa Pendinvc PDFRobin CookОценок пока нет
- Insuffisance Professionn PDFДокумент2 страницыInsuffisance Professionn PDFRobin CookОценок пока нет
- MASTERLeroySebastien PDFДокумент34 страницыMASTERLeroySebastien PDFRobin CookОценок пока нет
- Navastres Interieur-Fm PDFДокумент13 страницNavastres Interieur-Fm PDFRobin CookОценок пока нет
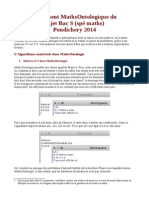
- Markov MathsOntologie PDFДокумент14 страницMarkov MathsOntologie PDFRobin CookОценок пока нет
- Planimètre PDFДокумент5 страницPlanimètre PDFRobin CookОценок пока нет
- THEORIE de La RC - II PDFДокумент4 страницыTHEORIE de La RC - II PDFRobin CookОценок пока нет
- TECHNIQUE de La RADIO-COMMANDE PDFДокумент5 страницTECHNIQUE de La RADIO-COMMANDE PDFRobin CookОценок пока нет
- Les Réseaux de SourcesДокумент6 страницLes Réseaux de SourcesRobin CookОценок пока нет
- Rapport de Travaux Pratiques de Mécanique Des Sols - Groupe 1 - Sous Groupe 1 PDFДокумент34 страницыRapport de Travaux Pratiques de Mécanique Des Sols - Groupe 1 - Sous Groupe 1 PDFOumarОценок пока нет
- Exposé Confort ThermiqueДокумент25 страницExposé Confort Thermiquered maxОценок пока нет
- Légende HiramДокумент4 страницыLégende HiramRosa_Tur_9524100% (2)
- Rapport Ecrit 2022 Physique-Chimie PDFДокумент3 страницыRapport Ecrit 2022 Physique-Chimie PDFPenda NiassОценок пока нет
- Aprue 10Документ8 страницAprue 10Ariel Angelo ElegbedeОценок пока нет
- Tour R+9Документ134 страницыTour R+9RÊDÄ ÜhОценок пока нет
- Ken Wilber - La Physique, Le Mysticisme Et Le Nouveau Paradigme Holographique 1984Документ25 страницKen Wilber - La Physique, Le Mysticisme Et Le Nouveau Paradigme Holographique 1984helabzОценок пока нет
- Corrige TD3 LM360 PDFДокумент6 страницCorrige TD3 LM360 PDFAdel LakhdariОценок пока нет
- AA4-Critères de Convergence Des Séries À Termes PositifsДокумент42 страницыAA4-Critères de Convergence Des Séries À Termes Positifseya nasfiОценок пока нет
- Polycopié BAEL 2 Chap 4Документ13 страницPolycopié BAEL 2 Chap 4anass benzОценок пока нет
- Thermo 3Документ4 страницыThermo 3lilian01.larocheОценок пока нет
- Effort Tranchant PoutreДокумент1 страницаEffort Tranchant PoutreBec RoudaynaОценок пока нет
- Isometrie Exo CorДокумент2 страницыIsometrie Exo CorCédric SorghoОценок пока нет
- Méthode Des Différences Finies Pour Les EDP Évolution PDFДокумент11 страницMéthode Des Différences Finies Pour Les EDP Évolution PDFAzize Razam100% (1)
- EMD S1 CM 2023 M2 CM (Récupération Automatique)Документ3 страницыEMD S1 CM 2023 M2 CM (Récupération Automatique)nawel mezighecheОценок пока нет
- Sommaire Codap 2010x Rev 03-11 X Rev10-12Документ47 страницSommaire Codap 2010x Rev 03-11 X Rev10-12Our SalahEddineОценок пока нет
- Étau ModélismeДокумент3 страницыÉtau ModélismeAdrien LupinОценок пока нет
- LE MURMURE DU SERPENT ANCIEN - 26 Mots de Force. Pratiques Secrétés de Sorc PDFДокумент14 страницLE MURMURE DU SERPENT ANCIEN - 26 Mots de Force. Pratiques Secrétés de Sorc PDFBAGAYOKO75% (4)
- Exercices Fonctions Affines-1Документ7 страницExercices Fonctions Affines-1Bartholomé THURОценок пока нет
- S6 Chapitre 4 Energie ChimiqueДокумент16 страницS6 Chapitre 4 Energie ChimiqueMed Raslene AlouiОценок пока нет
- Atf 45-3Документ15 страницAtf 45-3ragkaraОценок пока нет
- Traitement de L'air Et Climatisation. Généralités. (O)Документ17 страницTraitement de L'air Et Climatisation. Généralités. (O)BozoОценок пока нет
- TD ELECTROSTATIQUE Serie 2 2022 - 2023Документ2 страницыTD ELECTROSTATIQUE Serie 2 2022 - 2023miguelrikoudomedjoОценок пока нет
- Rapport FinaleДокумент162 страницыRapport FinaleArij Naily Ep HammamiОценок пока нет
- JANAF Termochemical TablesДокумент96 страницJANAF Termochemical TablesAlan Quintanar HaroОценок пока нет
- Cours Automate Scheinder TSX2-2-2Документ12 страницCours Automate Scheinder TSX2-2-2Eliance GrahoОценок пока нет
- Cours D'électronique Ch2 Diodes Et ApplicationsДокумент44 страницыCours D'électronique Ch2 Diodes Et ApplicationsZouhayra LaajiliОценок пока нет
- Cours RDM - MS1 - Partie 1Документ53 страницыCours RDM - MS1 - Partie 1gcd19Оценок пока нет
- Capteur de ForceДокумент5 страницCapteur de ForceNéjib M'hiriОценок пока нет