Вам также может понравиться
- Hardware Description LanguageДокумент1 страницаHardware Description LanguageSalmaAn MalikОценок пока нет
- Although Resistors Are Used To Reduce Current FlowДокумент6 страницAlthough Resistors Are Used To Reduce Current FlowSalmaAn MalikОценок пока нет
- Experiment 1 Objective:: Figure1-1 Light Emiting DiodeДокумент53 страницыExperiment 1 Objective:: Figure1-1 Light Emiting DiodeSalmaAn MalikОценок пока нет
- Experiment # 1: ObjectiveДокумент2 страницыExperiment # 1: ObjectiveSalmaAn MalikОценок пока нет
- If Statements in C++Документ1 страницаIf Statements in C++SalmaAn MalikОценок пока нет
- Design of An ATM (Automated Teller Machine) Controller:, E-Mail:, PH: 9885112363 / 040 44433434Документ2 страницыDesign of An ATM (Automated Teller Machine) Controller:, E-Mail:, PH: 9885112363 / 040 44433434SalmaAn MalikОценок пока нет
- 05 Ese Arts Gmps Jhugian Ghareeb Abad MultanДокумент165 страниц05 Ese Arts Gmps Jhugian Ghareeb Abad MultanSalmaAn MalikОценок пока нет
- Network Analysis: Lecture No. 2Документ8 страницNetwork Analysis: Lecture No. 2SalmaAn MalikОценок пока нет
- 07 Ese Arts Gps Jatoo Wala MultanДокумент184 страницы07 Ese Arts Gps Jatoo Wala MultanSalmaAn MalikОценок пока нет
- Design and Implementation of P2P Protocol For Mobile PhonesДокумент6 страницDesign and Implementation of P2P Protocol For Mobile PhonesSalmaAn MalikОценок пока нет
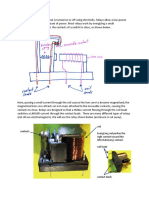
- Relays. A Relay Is A Switch That Is Turned On or Off Using Electricity. Relays Allow A Low-PowerДокумент3 страницыRelays. A Relay Is A Switch That Is Turned On or Off Using Electricity. Relays Allow A Low-PowerSalmaAn MalikОценок пока нет
- HGJHGJHДокумент38 страницHGJHGJHSalmaAn MalikОценок пока нет
- Model Based Development of A Tinyos-Based Wireless M-Bus ImplementationДокумент4 страницыModel Based Development of A Tinyos-Based Wireless M-Bus ImplementationSalmaAn MalikОценок пока нет
- Document Was Created To Download FileДокумент1 страницаDocument Was Created To Download FileSalmaAn MalikОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Chapter6b-Combinational Logic Design PracticesДокумент38 страницChapter6b-Combinational Logic Design PracticesZulkarnineОценок пока нет
- Math 11-CORE Gen Math-Q2-Week 1Документ26 страницMath 11-CORE Gen Math-Q2-Week 1Christian GebañaОценок пока нет
- Cell Biology: Science Explorer - Cells and HeredityДокумент242 страницыCell Biology: Science Explorer - Cells and HeredityZeinab ElkholyОценок пока нет
- NPTEL CC Assignment4Документ4 страницыNPTEL CC Assignment4Paul Stark100% (1)
- RF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMДокумент4 страницыRF Optimization Tips - TCH Block Rate Optimization Tips in Huawei GSMdolisieОценок пока нет
- Quid 2005Документ85 страницQuid 2005mayan73Оценок пока нет
- Planets and Solar System The Complete Manual 2016Документ132 страницыPlanets and Solar System The Complete Manual 2016Sonechka Sonya100% (3)
- Slab DesignДокумент96 страницSlab Designdilrangi100% (2)
- Mazda 3Документ5 страницMazda 3Jhony GranadosОценок пока нет
- Genetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)Документ67 страницGenetic Variability and Correlation Studies in Okra (Abelmuschus Esculentus (L) Moench)rajsign5100% (3)
- Practical - 1: 1.1 CommitДокумент8 страницPractical - 1: 1.1 CommitRoy BokhiriyaОценок пока нет
- Three-Dimensional Lithium-Ion Battery ModelДокумент35 страницThree-Dimensional Lithium-Ion Battery ModelmortezagashtiОценок пока нет
- Class Problems Sentences 13 The DДокумент20 страницClass Problems Sentences 13 The DKnowledgeIsTruePowerОценок пока нет
- Differentiation11 21Документ75 страницDifferentiation11 21Maryam ShahidОценок пока нет
- Panasonic MINAS A5Документ478 страницPanasonic MINAS A5Vaikuntam Ramamurthy100% (1)
- Unit 2 - Introduction To Java - Solutions For Class 9 ICSE APC Understanding Computer Applications With BlueJ Including Java Programs - KnowledgeBoatДокумент8 страницUnit 2 - Introduction To Java - Solutions For Class 9 ICSE APC Understanding Computer Applications With BlueJ Including Java Programs - KnowledgeBoatGopi Selvaraj67% (3)
- Datasheets A S50ib enДокумент2 страницыDatasheets A S50ib envantuan17792Оценок пока нет
- Clayton, R., Chen, S., & Lefort, G. (2005) - New Bit Design, Cutter Technology Extend PDC Applications To Hard Rock Drilling PDFДокумент9 страницClayton, R., Chen, S., & Lefort, G. (2005) - New Bit Design, Cutter Technology Extend PDC Applications To Hard Rock Drilling PDFadeelsnОценок пока нет
- Dr. Rife and Philip Hoyland's 3.3 MHZ SweepДокумент2 страницыDr. Rife and Philip Hoyland's 3.3 MHZ SweepKhalid Ibrahim100% (1)
- Astm C97/C97M-09Документ3 страницыAstm C97/C97M-09Azuriak150% (2)
- Fortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationДокумент14 страницFortinac: Juniper Ex Switch 802.1X-Mac-Authentication Device IntegrationSaid bel haj letaiefОценок пока нет
- Flower-Visiting Insect Pollinators of Mustard (Brassica: Napus) in Jammu RegionДокумент7 страницFlower-Visiting Insect Pollinators of Mustard (Brassica: Napus) in Jammu RegionMamata SubediОценок пока нет
- Nuxeo BookДокумент335 страницNuxeo Bookdannao4Оценок пока нет
- An Empirical Study On The Nexus Between The Emotional Intelligence of Top Managers and Their Assessment of Intellectual CapitalДокумент30 страницAn Empirical Study On The Nexus Between The Emotional Intelligence of Top Managers and Their Assessment of Intellectual Capitalmaher76Оценок пока нет
- Market Manipulation Rules and IPO Underpricing: Huu - Duong@monash - EduДокумент54 страницыMarket Manipulation Rules and IPO Underpricing: Huu - Duong@monash - EduTI Logic ?? sobayedОценок пока нет
- Corrosion Properties of Copper Nickel Alloys in Chlorinated Sea WaterДокумент14 страницCorrosion Properties of Copper Nickel Alloys in Chlorinated Sea WaterArunОценок пока нет
- Ns 3 TutorialДокумент105 страницNs 3 TutorialparabavireoОценок пока нет
- ManageEngine Application Manager Best PracticesДокумент12 страницManageEngine Application Manager Best PracticesNghiêm Sỹ Tâm PhươngОценок пока нет
- Stock Price Prediction Using LSTMДокумент29 страницStock Price Prediction Using LSTMKunal GargОценок пока нет
- Catalogue Solid Core PDFДокумент16 страницCatalogue Solid Core PDFdangodОценок пока нет