Вам также может понравиться
- Earthing System AuditДокумент4 страницыEarthing System AuditBiju100% (1)
- Solar Cable BrochureДокумент8 страницSolar Cable BrochureBijuОценок пока нет
- Implementation - Plan - Public - ConsultationДокумент28 страницImplementation - Plan - Public - ConsultationBijuОценок пока нет
- Solar Inverters HitachiДокумент8 страницSolar Inverters HitachiBijuОценок пока нет
- Customers AuditДокумент17 страницCustomers AuditBijuОценок пока нет
- Lec 23Документ20 страницLec 23BijuОценок пока нет
- Technical Specification For 33 KV Aerial Bunched Cable - 2Документ7 страницTechnical Specification For 33 KV Aerial Bunched Cable - 2BijuОценок пока нет
- 9600-3003-2 C Premier Industrial Manual A4Документ8 страниц9600-3003-2 C Premier Industrial Manual A4BijuОценок пока нет
- Exe Sum Arkay EngДокумент11 страницExe Sum Arkay EngBijuОценок пока нет
- Roman NumeralsДокумент10 страницRoman NumeralsBiju100% (2)
- Ubc - 1963 - A7 S2 S7Документ90 страницUbc - 1963 - A7 S2 S7BijuОценок пока нет
- Clean Power Drive Solution To Harmonic DistortionДокумент8 страницClean Power Drive Solution To Harmonic DistortionBijuОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Chapter 7 - TrigonometryДокумент30 страницChapter 7 - TrigonometryAnna MethyldaОценок пока нет
- ANSI Relaying Current Transformer BurdenДокумент1 страницаANSI Relaying Current Transformer BurdenbhaskarinvuОценок пока нет
- Structural Analysis and Behavior Arbabi 1991Документ616 страницStructural Analysis and Behavior Arbabi 1991RenzoDT100% (1)
- Course File & Lab (2) .File ListДокумент3 страницыCourse File & Lab (2) .File ListRAMESHОценок пока нет
- Lab 4 Alcohol - 2011-2Документ8 страницLab 4 Alcohol - 2011-2Miisty Raiyen HallОценок пока нет
- Characterizing Metallic Microstructure Cu-Based AlloysДокумент51 страницаCharacterizing Metallic Microstructure Cu-Based AlloysjuegyiОценок пока нет
- 049-Itp For Lighting and Small Power (Building) PDFДокумент15 страниц049-Itp For Lighting and Small Power (Building) PDFKöksal Patan100% (1)
- Prototype To Help The Improvement of E-Toll PaymentДокумент14 страницPrototype To Help The Improvement of E-Toll Paymentfarhan satriyaОценок пока нет
- Presented By:: ASQ Section 0700 ASQ Section 0701Документ35 страницPresented By:: ASQ Section 0700 ASQ Section 0701fennyОценок пока нет
- FLY231GBДокумент8 страницFLY231GBIon VasileОценок пока нет
- Zeljkovic CedomirДокумент6 страницZeljkovic CedomirPatriceEmОценок пока нет
- Franc3D V6 Nastran TutorialДокумент52 страницыFranc3D V6 Nastran TutorialSandeep BhatiaОценок пока нет
- 1-5 Practice - AДокумент2 страницы1-5 Practice - AStanleyОценок пока нет
- Magnetic Resonance Imaging Free Surfer SoftwareДокумент86 страницMagnetic Resonance Imaging Free Surfer SoftwareDenise MathreОценок пока нет
- System of Linear InequalitiesДокумент7 страницSystem of Linear InequalitiesDominic SavioОценок пока нет
- Electron Diffraction Lab Report - KatzerДокумент7 страницElectron Diffraction Lab Report - Katzerapi-489811472Оценок пока нет
- Improvements in Superabsorbent Water Blocking Materials For New Power Cable ApplicationsДокумент6 страницImprovements in Superabsorbent Water Blocking Materials For New Power Cable Applicationsssingaram1965Оценок пока нет
- Pet PhotographyДокумент28 страницPet PhotographyAnonymous Wyb8Y1Оценок пока нет
- 15 Design For Safety HazanДокумент12 страниц15 Design For Safety Hazansauravsagar14Оценок пока нет
- Fundamentals of Aircraft SystemsДокумент353 страницыFundamentals of Aircraft SystemsVishal Wagh100% (4)
- Natural ColorДокумент14 страницNatural ColorleeОценок пока нет
- Physics - 11Документ11 страницPhysics - 11Ishika GuptaОценок пока нет
- Mos GRPДокумент53 страницыMos GRPslxanto100% (3)
- Brackish WaterДокумент35 страницBrackish WaterChemsys SunnyОценок пока нет
- Sci 202 - Course GuideДокумент8 страницSci 202 - Course GuideRicardo VelozОценок пока нет
- 4c Lab3 Heat EnginesДокумент4 страницы4c Lab3 Heat EnginesAiza AliОценок пока нет
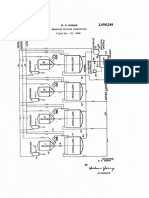
- Us2656248 PDFДокумент4 страницыUs2656248 PDFchuckannabelleОценок пока нет
- Radiation QuestionsДокумент27 страницRadiation QuestionsSteve BishopОценок пока нет
- South Carolina Furniture IncДокумент11 страницSouth Carolina Furniture Inchmz18113881Оценок пока нет
- CNC Lathe Machining CatiaДокумент82 страницыCNC Lathe Machining CatiamasoudОценок пока нет